







 论文《Proposal: The Turbo-PLONK program syntax for specifying SNARK programs》提出了turbo-PLONK程序,这是一种用于构建zk-SNARK的通用和灵活框架。它改进了基于多项式承诺的zk-SNARK方案,特别是针对固定基数的椭圆曲线标量乘法操作,提供了更快的计算速度。turbo-PLONK程序包含过渡门和复制约束,用于表示和验证算术电路。通过LookUp和交错PLONK门等技术,减少了计算复杂度。论文还详细介绍了如何在2比特NAF添加门中实现固定基标量乘法,并对比了与Groth16的性能,显示turbo-PLONK在速度和约束数量上有显著优势。
论文《Proposal: The Turbo-PLONK program syntax for specifying SNARK programs》提出了turbo-PLONK程序,这是一种用于构建zk-SNARK的通用和灵活框架。它改进了基于多项式承诺的zk-SNARK方案,特别是针对固定基数的椭圆曲线标量乘法操作,提供了更快的计算速度。turbo-PLONK程序包含过渡门和复制约束,用于表示和验证算术电路。通过LookUp和交错PLONK门等技术,减少了计算复杂度。论文还详细介绍了如何在2比特NAF添加门中实现固定基标量乘法,并对比了与Groth16的性能,显示turbo-PLONK在速度和约束数量上有显著优势。
1. 引言
Aztec protocol 团队的Gabizon 和 Williamson 发表于2020年ZKProof第3届Workshop的论文《Proposal: The Turbo-PLONK program syntax for specifying SNARK programs》。
代码实现有:
- https://github.com/AZTECProtocol/barretenberg
近期的Marlin和PLONK都是依赖于Polynomial commitment scheme来构建zk-SNARK了,而与待证明的statement采用R1CS constraints 关系并不紧密。主要原因在于,polynomial commitment scheme构建zk-SNARK中,其verifier equation 为checked “in the clear” on a random opening of the prover polynomials,而之前的R1CS constraint zk-SNARK方案中的verifier equation 是“in the exponent” using a pairing。
在本论文中,提供了一种框架来实现更通用和灵活的constraint类型,该框架称为 turbo-PLONK programs。
turbo-PLONK programs 框架可提供:
- fixed-base elliptic curve scalar multiplication (仅需1 turbo-PLONK gate for each two input bits)
- a primitive useful for constructing Pedersen hashes。
同时,使用Grumkin curve (255-bit curve embedded over bn254),针对scalar multiplication操作,本文的方案相比于Groth16快约2倍。
2. Turbo PLONK programs
a turbo-PLONK program
P
\mathscr{P}
P 可看成是一系列的状态
v
∈
F
w
v\in\mathbb{F}^w
v∈Fw,其中
w
w
w为state size,由program designer设定。
Proof size和Prover run time随着
w
w
w线性增加,通常
w
w
w的值为3或者4。
P \mathscr{P} P支持两种类型:
- transition gate
- copy constraint
相应的valid execution trace 为 T ∈ ( F w ) t T\in(\mathbb{F}^w)^t T∈(Fw)t。
2.1 transition gate
P \mathscr{P} P 的 transition constraint 对应为 a 2 w + l 2w+l 2w+l-variate degree at most d d d polynomial P P P,其中 d d d为 P \mathscr{P} P的degree,建议设置 d = w + 1 d=w+1 d=w+1, l l l为the selector number。
P \mathscr{P} P 的 transition gate 中包含了:
- 所有的transition constraints
- l l l selector vectors q 1 , ⋯ , q l ∈ F t q_1,\cdots,q_l\in\mathbb{F}^t q1,⋯,ql∈Ft
若满足以下条件,可称 T T T satisfy the transition gate:
- 对于每一个transition constraint i ∈ [ t ] i\in[t] i∈[t], P ( T i , 1 , ⋯ , T i , w , T i + 1 , 1 , ⋯ , T i + 1 , w , q 1 ( i ) , ⋯ , q l ( i ) ) = 0 P(T_{i,1},\cdots,T_{i,w},T_{i+1,1},\cdots,T_{i+1,w},q_1(i),\cdots,q_l(i))=0 P(Ti,1,⋯,Ti,w,Ti+1,1,⋯,Ti+1,w,q1(i),⋯,ql(i))=0均成立。
2.2 copy constraint
a partition of w × t w\times t w×t into distinct sets { S i } \{S_i\} {Si}。
若满足以下条件,可称 T T T satisfy the copy constraint:
- 当 ( i , j ) 和 ( i ′ , j ′ ) (i,j)和(i',j') (i,j)和(i′,j′) 属于partition中的同一set时,有 T i , j = T i ′ , j ′ T_{i,j}=T_{i',j'} Ti,j=Ti′,j′。
copy constraint可理解为enabling memory access,因为我们可以要求execution trace中的后一值等于前一值。
3. arithmetic circuit的特例
arithmetic circuit的表达规则为:
- 每一行表示1个gate;
- 每一行中的值(row values)表示该gate对应的incoming wire values和outgoing wire values
- 若需表达 fan-in t t t circuits,则设置 w = t + 1 w=t+1 w=t+1。
如,对于 fan-in 2 2 2,其row values 为 v 1 , v 2 , v 3 v_1,v_2,v_3 v1,v2,v3,分别为该row 对应gate的left wire value、right wire value 和 output wire value。
3.1 transition constraint
对于transition constraint,其不会用到下一行的values
T
i
+
1
,
1
,
⋯
,
T
i
+
1
,
w
T_{i+1,1},\cdots,T_{i+1,w}
Ti+1,1,⋯,Ti+1,w,transition constraint仅check 其所在行中的值是否符合addition gate或multiplication gate规则。可借助 3个selectors 和 1个constraint polynomial
P
P
P of degree
t
+
1
t+1
t+1。
如对于fan-in
2
2
2 circuit,可定义为:
P
(
q
L
,
q
R
,
q
M
,
x
1
,
x
2
,
x
3
)
=
q
L
⋅
x
1
+
q
R
⋅
x
2
+
q
M
⋅
x
1
x
2
−
x
3
P(q_L,q_R,q_M,x_1,x_2,x_3)=q_L\cdot x_1+q_R\cdot x_2+q_M\cdot x_1x_2-x_3
P(qL,qR,qM,x1,x2,x3)=qL⋅x1+qR⋅x2+qM⋅x1x2−x3
具体为:
- 对于addition gate,设置 q L ( i ) = q R ( i ) = 1 , q M ( i ) = 0 q_L(i)=q_R(i)=1,q_M(i)=0 qL(i)=qR(i)=1,qM(i)=0;
- 对于multiplication gate,设置 q L ( i ) = q R ( i ) = 0 , q M ( i ) = 1 q_L(i)=q_R(i)=0,q_M(i)=1 qL(i)=qR(i)=0,qM(i)=1。
3.2 copy constraint
copy constraint用于enforce the wiring of the circuit。如,对于4th gate,其left wire 为 the second gate的output wire,则可表示为:
T
2
,
3
=
T
4
,
1
T_{2,3}=T_{4,1}
T2,3=T4,1
4. 基础技术
Turbo-PLONK中主要使用了2个基础技术:
- Look Ups
- Interleaving PLONK Gates
4.1 Look Ups
假设有2个selector
q
1
,
q
2
q_1,q_2
q1,q2,为了enforce:
row
i
i
i的第一个值 等于
q
b
(
i
)
q_b(i)
qb(i),其中
b
b
b为同一行中的第二个值。
则相应的constraint可表示为:【即
x
1
=
q
x
2
x_1=q_{x_2}
x1=qx2。当
x
2
x_2
x2等于1时,有
x
1
=
q
1
x_1=q_1
x1=q1;当
x
2
=
2
x_2=2
x2=2时,有
x
1
=
q
2
x_1=q_2
x1=q2。】
x
1
=
−
q
1
⋅
(
x
2
−
2
)
+
q
2
⋅
(
x
2
−
1
)
x_1=-q_1\cdot (x_2-2)+q_2\cdot (x_2-1)
x1=−q1⋅(x2−2)+q2⋅(x2−1)
接下来,如果需要在两个值之间进行选择,或者选择其负数,可引入row中的第三个值,设其为
1
1
1或
−
1
-1
−1,相应的constraint可表示为:【即
x
1
=
x
3
⋅
q
x
2
x_1=x_3\cdot q_{x_2}
x1=x3⋅qx2。其中
x
3
x_3
x3取
1
1
1或
−
1
-1
−1。】
x
1
=
(
−
q
1
⋅
(
x
2
−
2
)
+
q
2
⋅
(
x
2
−
1
)
)
⋅
x
3
x_1=(-q_1\cdot (x_2-2)+q_2\cdot (x_2-1))\cdot x_3
x1=(−q1⋅(x2−2)+q2⋅(x2−1))⋅x3
4.2 Interleaving PLONK Gates
之前设计的transition gate对应为a set of
2
w
+
l
2w+l
2w+l-variate polynomials,伴随有
l
l
l个selector polynomials。
针对每一行,可专门设计不同的subset of constraints depending on the row。
如,已知2个gate G 1 , G 2 G_1,G_2 G1,G2,需仅对 G 1 G_1 G1 enforce some row transitions,而仅对 G 2 G_2 G2 enforce 另一组row transitions, G 1 G_1 G1和 G 2 G_2 G2之间有一些共同的constraints。
通用的解决方案为:增加2个selector q G 1 , q G 2 q_{G_1},q_{G_2} qG1,qG2,根据指定row中相应的gate是否激活对应取值为 0 或 1 0或1 0或1。然后multiply each constraint P P P in G i G_i Gi by q G i q_{G_i} qGi。同时,defIne the new gate’s constraints to be the union of these constraints from both gates。
5. Fixed-base scalar multiplication
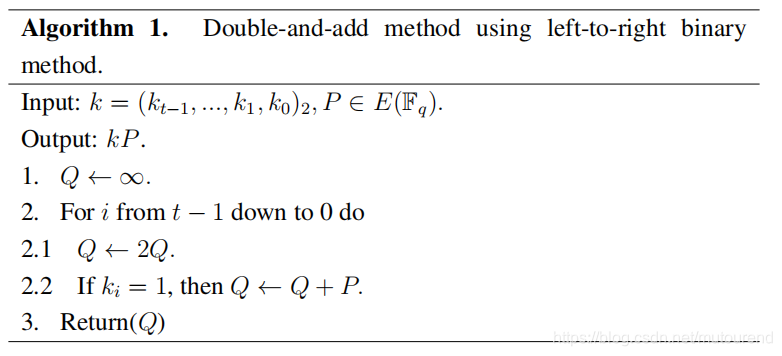
在椭圆密码学中,最贵的操作之一就是scalar multiplication:
假设scalar
k
=
15
k=15
k=15,对应的二进制表示为
0
b
1111
0b1111
0b1111,即
k
k
k的hamming weight为4。若采用如上double-and-add算法,需要3次point doubling操作和4次point addtion操作,整个操作的复杂度高度依赖于the number of set 或 hamming weight,且加法操作仅在当前bit不为0时执行。
为了减少scalar multiplication操作的计算复杂度,方法之一是reduce hamming weights of the scalar。
假设
#
E
(
F
q
)
=
r
h
\#E(\mathbb{F}_q)=rh
#E(Fq)=rh,其中
r
r
r为prime的,
h
h
h很小,使得
r
≈
q
r\approx q
r≈q。point
P
和
Q
P和Q
P和Q均具有order
r
r
r,scalar
k
k
k为在
[
1
,
r
−
1
]
[1,r-1]
[1,r−1]区间的随机值。
k
k
k的二进制表示为
(
k
t
−
1
,
⋯
,
k
2
,
k
1
,
k
0
)
2
(k_{t-1},\cdots,k_2,k_1,k_0)_2
(kt−1,⋯,k2,k1,k0)2,其中
t
≈
m
=
⌈
log
2
q
⌉
t\approx m=\left \lceil \log_2 q \right \rceil
t≈m=⌈log2q⌉。若point
P
P
P为fixed且storage is availabe,则point multilication 可借助pre-computation table来加速。
具体的加速方法有:【本节主要关注fixed-base下对hamming weight的reduce。】
- Non-Adjacent Form(NAF)
- Window Method
- Zero Occurence Evaluation
- Lim and Lee’s Method
- Tsaur and Chou’s Method
- Direct Doubling Method
- Mohamed, Hashim and Hutter’s Method
本文主要关注NAF算法:
若
P
=
(
x
,
y
)
∈
E
(
F
q
)
P=(x,y)\in E(\mathbb{F}_q)
P=(x,y)∈E(Fq),则
−
P
-P
−P表示为
−
P
=
(
x
,
−
y
)
-P=(x,-y)
−P=(x,−y)。因此,point减法 可转换为 point加法 进行运算。
针对NAF的主要优化策略为:
- 1)约定 scalar s s s NAF representation;
- 2)选择每轮中要add的correction point;
- 3)add the selected point;
- 4)initialization gate
5.1 the NAF scalar representation
假设scalar
s
s
s的取值范围为
{
1
,
.
.
,
M
}
\{1,..,M\}
{1,..,M},其中
M
<
r
/
2
M<r/2
M<r/2,且存在整数
n
n
n使得
M
=
2
⋅
4
n
−
1
M=2\cdot 4^n-1
M=2⋅4n−1。
此时,
s
s
s可表示为
s
=
t
+
∑
i
=
0
n
−
1
b
i
⋅
4
i
s=t+\sum_{i=0}^{n-1}b_i\cdot 4^i
s=t+∑i=0n−1bi⋅4i,其中
b
i
∈
{
−
3
,
−
1
,
1
,
3
}
,
t
∈
{
4
n
,
4
n
+
1
}
b_i\in\{-3,-1,1,3\},t\in\{4^n,4^n+1\}
bi∈{−3,−1,1,3},t∈{4n,4n+1}。可将
s
s
s看成是由
n
n
n个input quads
{
b
i
}
\{b_i\}
{bi} 和 1个input bit
t
t
t组成。
Turbo-Plonk的program针对此情况,包含了 n n n轮运算,设置初始 s u m sum sum 为 t [ g ] t[g] t[g] ,在第 i i i轮:
- 为add { − 3 [ g i ] , − 1 [ g i ] , 1 [ g i ] , 3 [ g i ] } \{-3[g_i],-1[g_i],1[g_i],3[g_i]\} {−3[gi],−1[gi],1[gi],3[gi]} 中之一,其中 g i = 4 n − i [ g ] g_i=4^{n-i}[g] gi=4n−i[g] 为 a precomputed power of our actual generator。
为了reduce program width,优化策略为:
- only explicitly represent “intermediate sums” of our scalar, and not the actual input quads。原因为:the intermediate sums are more convenient than the quads in checking the correct scalar s s s was used。
intermediate sums的定义为:
- a 0 = t / 4 n , a 1 = t / 4 n − 1 + b n − 1 a_0=t/4^n,a_1=t/4^{n-1}+b_{n-1} a0=t/4n,a1=t/4n−1+bn−1,对于 i ∈ { 2 , ⋯ , n } i\in \{2,\cdots,n\} i∈{2,⋯,n},有 a i = 4 ⋅ a i − 1 + b n − i a_i=4\cdot a_{i-1}+b_{n-i} ai=4⋅ai−1+bn−i
最终有 a n = s a_n=s an=s。
为了cancel the effect of the sign of the input quad,优化策略为:
- squaring the difference of two intermediate sums,因为 the x x x coordinate of the point we want to select only depends on the magnitude on the difference。(而若想explicityly represent this magnitude,将再次增加the width of the final program。)
对于2-bit NAF addition gate,对应为 已知 row values ( x 1 , y 1 , x α , 1 , a i − 1 ) , ( x 2 , y 2 , x α , 2 , a i ) (x_1,y_1,x_{\alpha,1},a_{i-1}), (x_2,y_2,x_{\alpha,2}, a_i) (x1,y1,xα,1,ai−1),(x2,y2,xα,2,ai),需定义a width 4 program来 check:
- ( x 2 , y 2 ) = ( x 1 , y 1 ) + ( a i − 4 a i − 1 ) [ g i ] (x_2,y_2)=(x_1,y_1)+(a_i-4a_{i-1})[g_i] (x2,y2)=(x1,y1)+(ai−4ai−1)[gi]
5.2 selecting the correct point to add
1)第一步为采用4.1节中的lookup方法,来选择特定round中需add的coordinates of the correct point。
以round
i
∈
[
n
]
i\in [n]
i∈[n]为例,定义
g
i
=
(
x
β
,
y
β
)
,
3
[
g
i
]
=
(
x
γ
,
y
γ
)
g_i=(x_{\beta},y_{\beta}), 3[g_i]=(x_{\gamma},y_{\gamma})
gi=(xβ,yβ),3[gi]=(xγ,yγ)。
(
x
α
,
y
α
)
(x_{\alpha},y_{\alpha})
(xα,yα)为在该轮中需add到input中的point。因此,
(
x
α
,
y
α
)
(x_{\alpha},y_{\alpha})
(xα,yα) 为
{
(
x
β
,
y
β
)
,
(
x
β
,
−
y
β
)
,
(
x
γ
,
y
γ
)
,
(
x
γ
,
−
y
γ
)
}
\{(x_{\beta},y_{\beta}),(x_{\beta},-y_{\beta}),(x_{\gamma},y_{\gamma}),(x_{\gamma},-y_{\gamma})\}
{(xβ,yβ),(xβ,−yβ),(xγ,yγ),(xγ,−yγ)} set 中的一个point。
x
α
x_{\alpha}
xα可通过以下方式恢复:
(
a
i
−
4
a
i
−
1
)
2
−
9
−
8
x
β
+
(
a
i
−
4
a
i
−
1
)
2
−
1
8
x
γ
=
x
α
⇒
(
a
i
−
4
a
i
−
1
)
2
x
γ
−
x
β
8
+
9
x
β
−
x
γ
8
=
x
α
\frac{(a_i-4a_{i-1})^2-9}{-8}x_{\beta}+\frac{(a_i-4a_{i-1})^2-1}{8}x_{\gamma}=x_{\alpha}\Rightarrow (a_i-4a_{i-1})^2\frac{x_{\gamma}-x_{\beta}}{8}+\frac{9x_{\beta}-x_{\gamma}}{8}=x_{\alpha}
−8(ai−4ai−1)2−9xβ+8(ai−4ai−1)2−1xγ=xα⇒(ai−4ai−1)28xγ−xβ+89xβ−xγ=xα
替换其中的precomputed constants为selectors:
q
x
α
,
1
=
x
γ
−
x
β
8
,
q
x
α
,
2
=
x
γ
−
x
β
8
⇒
(
a
i
−
4
a
i
−
1
)
2
q
x
α
,
1
+
q
x
α
,
2
=
x
α
q_{x_{\alpha,1}}=\frac{x_{\gamma}-x_{\beta}}{8},q_{x_{\alpha,2}}=\frac{x_{\gamma}-x_{\beta}}{8}\Rightarrow (a_i-4a_{i-1})^2q_{x_{\alpha,1}}+q_{x_{\alpha,2}}=x_{\alpha}
qxα,1=8xγ−xβ,qxα,2=8xγ−xβ⇒(ai−4ai−1)2qxα,1+qxα,2=xα
将
x
α
x_{\alpha}
xα存储为distinct wire value,跟使用cubic polynomial identity来提取相应的
y
y
y坐标
y
α
y_{\alpha}
yα:
(
x
α
−
x
γ
)
(
a
i
−
4
a
i
−
1
)
(
x
β
−
x
γ
)
y
β
+
(
x
α
−
x
β
)
(
a
i
−
4
a
i
−
1
)
3
(
x
γ
−
x
β
)
y
γ
=
y
α
\frac{(x_{\alpha}-x_{\gamma})(a_i-4a_{i-1})}{(x_{\beta}-x_{\gamma})}y_{\beta}+\frac{(x_{\alpha}-x_{\beta})(a_i-4a_{i-1})}{3(x_{\gamma}-x_{\beta})}y_{\gamma}=y_{\alpha}
(xβ−xγ)(xα−xγ)(ai−4ai−1)yβ+3(xγ−xβ)(xα−xβ)(ai−4ai−1)yγ=yα
⇒
(
x
α
3
y
β
−
y
γ
3
(
x
β
−
x
γ
)
+
x
β
y
γ
−
3
x
γ
y
β
3
(
x
β
−
x
γ
)
)
(
a
i
−
4
a
i
−
1
)
=
y
α
\Rightarrow (x_{\alpha}\frac{3y_{\beta}-y_{\gamma}}{3(x_{\beta}-x_{\gamma})}+\frac{x_{\beta}y_{\gamma}-3x_{\gamma}y_{\beta}}{3(x_{\beta}-x_{\gamma})})(a_i-4a_{i-1})=y_{\alpha}
⇒(xα3(xβ−xγ)3yβ−yγ+3(xβ−xγ)xβyγ−3xγyβ)(ai−4ai−1)=yα
引入2个precomputed selectors,表示为:
q
y
α
,
1
=
3
y
β
−
y
γ
3
(
x
β
−
x
γ
)
,
q
y
α
,
2
=
x
β
y
γ
−
3
x
γ
y
β
3
(
x
β
−
x
γ
)
q_{y_{\alpha,1}}=\frac{3y_{\beta}-y_{\gamma}}{3(x_{\beta}-x_{\gamma})},q_{y_{\alpha,2}}=\frac{x_{\beta}y_{\gamma}-3x_{\gamma}y_{\beta}}{3(x_{\beta}-x_{\gamma})}
qyα,1=3(xβ−xγ)3yβ−yγ,qyα,2=3(xβ−xγ)xβyγ−3xγyβ
⇒
(
x
α
q
y
α
,
1
+
q
y
α
,
2
)
(
a
i
−
4
a
i
−
1
)
=
y
α
\Rightarrow (x_{\alpha}q_{y_{\alpha,1}}+q_{y_{\alpha,2}})(a_i-4a_{i-1})=y_{\alpha}
⇒(xαqyα,1+qyα,2)(ai−4ai−1)=yα
可将 y α 2 y_{\alpha}^2 yα2表示为 x α 3 + b c u r v e x_{\alpha}^3+b_{curve} xα3+bcurve,其中 b c u r v e b_{curve} bcurve为short weierstrass curve参数。对于BN254 embedded curve, b c u r v e = − 17 b_{curve}=-17 bcurve=−17。
5.3 add the selected point
在5.2节,实现了select the correct point to add in a given round,在本节,将讲述如何actually add the selected point。
在每一轮,当add powers of disjoint magnitude of generator时,可使用不处理重复
x
x
x坐标值的incomplete affine addtion公式,如,对于
(
x
1
,
y
1
)
+
(
x
α
,
y
α
)
=
(
x
2
,
y
2
)
(x_1,y_1)+(x_{\alpha},y_{\alpha})=(x_2,y_2)
(x1,y1)+(xα,yα)=(x2,y2),相应可表示为:
x
2
=
(
y
α
−
y
1
x
α
−
x
1
)
2
−
x
α
−
x
1
x_2=(\frac{y_{\alpha}-y_1}{x_{\alpha}-x_1})^2-x_{\alpha}-x_1
x2=(xα−x1yα−y1)2−xα−x1
y
2
=
(
y
α
−
y
1
x
α
−
x
1
)
2
(
x
1
−
x
2
)
−
y
1
y_2=(\frac{y_{\alpha}-y_1}{x_{\alpha}-x_1})^2(x_1-x_{2})-y_1
y2=(xα−x1yα−y1)2(x1−x2)−y1
对此,可以identity表示通过gate来evaluate,即:
(
x
2
+
x
α
+
x
1
)
(
x
α
−
x
1
)
2
−
(
y
α
−
y
1
)
2
=
0
(x_2+x_{\alpha}+x_1)(x_{\alpha}-x_1)^2-(y_{\alpha}-y_1)^2=0
(x2+xα+x1)(xα−x1)2−(yα−y1)2=0
(
y
2
+
y
1
)
(
x
α
−
x
1
)
−
(
y
α
−
y
1
)
(
x
1
−
x
2
)
=
0
(y_2+y_1)(x_{\alpha}-x_1)-(y_{\alpha}-y_1)(x_1-x_2)=0
(y2+y1)(xα−x1)−(yα−y1)(x1−x2)=0
借助5.2节的precomputed selectors,以上
x
x
x和
y
y
y坐标 check可转换为:
(
x
2
+
x
α
+
x
1
)
(
x
α
−
x
1
)
2
+
2
(
a
i
−
4
a
i
−
1
)
(
x
α
q
y
α
,
1
+
q
y
α
,
2
)
y
1
−
y
1
2
−
b
c
u
r
v
e
=
0
(x_2+x_{\alpha}+x_1)(x_{\alpha}-x_1)^2+2(a_i-4a_{i-1})(x_{\alpha}q_{y_{\alpha,1}}+q_{y_{\alpha,2}})y_1-y_1^2-b_{curve}=0
(x2+xα+x1)(xα−x1)2+2(ai−4ai−1)(xαqyα,1+qyα,2)y1−y12−bcurve=0
(
y
2
+
y
1
)
(
x
α
−
x
1
)
−
(
(
a
i
−
4
a
i
−
1
)
(
x
α
q
y
α
,
1
+
q
y
α
,
2
)
−
y
1
)
(
x
1
−
x
2
)
=
0
(y_2+y_1)(x_{\alpha}-x_1)-((a_i-4a_{i-1})(x_{\alpha}q_{y_{\alpha,1}}+q_{y_{\alpha,2}})-y_1)(x_1-x_2)=0
(y2+y1)(xα−x1)−((ai−4ai−1)(xαqyα,1+qyα,2)−y1)(x1−x2)=0
5.4 initialization gate
最后,还需要add 5.1节的offset t t t,实现过程为:
- 根据 a 0 = 1 a_0=1 a0=1还是 a 0 = 1 + 1 / 4 n a_0=1+1/4^n a0=1+1/4n,将 ( x 0 , y 0 ) (x_0,y_0) (x0,y0)分别初始化为 ( 4 n ) [ g ] (4^n)[g] (4n)[g]或者 ( 4 n + 1 ) [ g ] (4^n+1)[g] (4n+1)[g]。
- 采用degree two constraint来验证相应的 a 0 a_0 a0是否在指定区间内。
最终,将整个fixed-base scalar multiplication 以
n
+
1
n+1
n+1 行 2-bit NAF addtion gate表示为:
(
x
0
y
0
x
α
,
0
a
0
x
1
y
1
x
α
,
1
a
1
⋮
⋮
⋮
⋮
x
n
y
n
x
α
,
n
a
n
)
\begin{pmatrix} x_0 & y_0 & x_{\alpha,0} & a_0\\ x_1 & y_1 & x_{\alpha,1} & a_1\\ \vdots & \vdots & \vdots & \vdots\\ x_n & y_n & x_{\alpha, n}& a_n \end{pmatrix}
⎝⎜⎜⎜⎛x0x1⋮xny0y1⋮ynxα,0xα,1⋮xα,na0a1⋮an⎠⎟⎟⎟⎞
具体见https://github.com/AZTECProtocol/barretenberg中的 create_fixed_group_add_gate() 和 create_fixed_group_add_gate_with_init() 函数实现。
6. BN254 curve Pedersen hash 性能评估
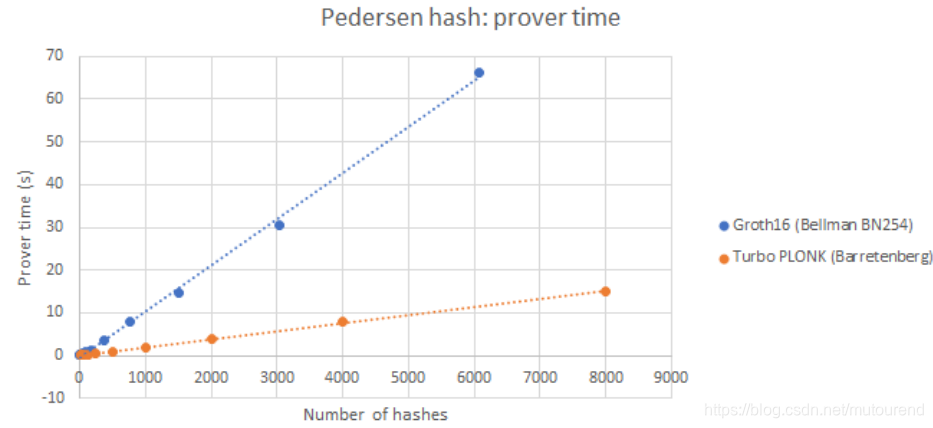
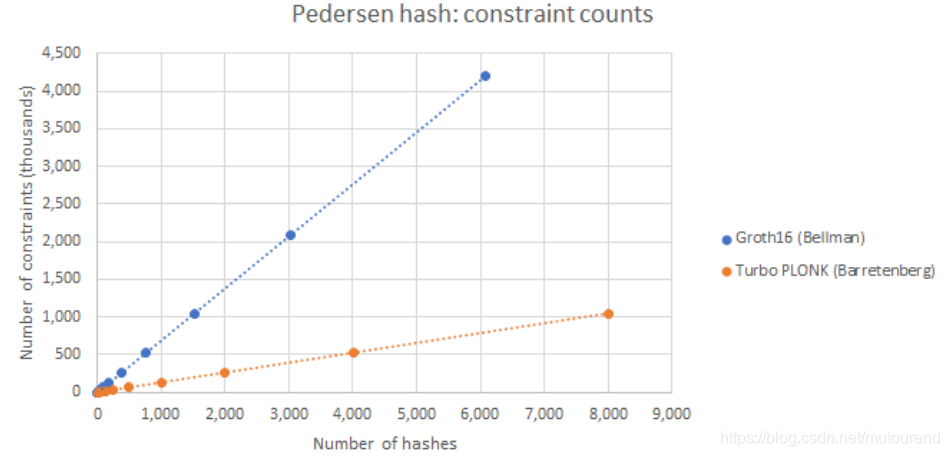
基于BN254 curve 将Groth16中的Pedersen hash (Bellman)Prove 时间 与 barretenberg 中的TurboPLONK 实现对比,TuroPLONK的速度快将近5倍,且TurboPLONK中的constraints数量 比 Groth16中的R1CS constraints数量 少 将近5倍:【但是,单个TuboPLONK constraint的prove计算量 约为 单个Groth16 constraint prove计算量的2倍。而且,Groth16中20%的constraint都需要bit decomposition。TurboPLONK中这些binary gate的prove time 要比 Groth16中的 贵4倍左右。(由于TurboPLONK中不需要判断 the scalars in prover computation are actually equal to the witness。)】
从multi-scalar-multiplication over elliptic curves的维度看,就 Libff、Bellman、Barretenberg 这三个库的实现,性能对比为:【multi-scalar-multiplication in
G
1
G_1
G1】

Barretenberg 在普通消费者硬件上,执行100万次scalar multiplication运算的时间小于1秒。
7. different-base scalar multiplication
Pippenger’s multi-exponentiation 是当前计算multiple scalar-multiplication over different bases 最快的算法。
本文发现,当计算multi-products时,“使用affine坐标系的point addtion 公式” 比 “使用projective坐标系和jacobian坐标系的point addition 公式” 所需的field multiplication数量更少。
当采用affine坐标系时,相应的point addition公式为:
λ
=
y
2
−
y
1
x
2
−
x
1
m
o
d
p
\lambda=\frac{y_2-y_1}{x_2-x_1}\mod p
λ=x2−x1y2−y1modp
x
3
=
λ
2
−
(
x
2
+
x
1
)
m
o
d
p
x_3=\lambda^2 -(x_2+x_1)\mod p
x3=λ2−(x2+x1)modp
y
3
=
λ
(
x
1
−
x
3
)
−
y
1
m
o
d
p
y_3=\lambda(x_1-x_3)-y_1\mod p
y3=λ(x1−x3)−y1modp
计算 λ \lambda λ需要一个 modular inverse运算,其比单个的field multiplication运算贵一个数量级。
但是,Pippenger multi-product可生成sequences of independent point additions。即,the outputs of additions in the sequence are not inputs to any additions in sequence。
因此,可使用Montgomery’s trick来计算batch modular inverses:
∀
i
∈
{
1
,
⋯
,
n
}
:
d
i
=
∏
j
=
1
i
−
1
a
j
\forall i\in\{1,\cdots,n\}: d_i=\prod_{j=1}^{i-1}a_j
∀i∈{1,⋯,n}:di=∏j=1i−1aj
s
=
(
d
n
a
n
)
−
1
s=(d_na_n)^{-1}
s=(dnan)−1
∀
i
∈
{
1
,
⋯
,
n
}
:
e
i
=
s
∏
j
=
i
+
1
n
a
j
\forall i\in\{1,\cdots,n\}:e_i=s\prod_{j=i+1}^{n}a_j
∀i∈{1,⋯,n}:ei=s∏j=i+1naj
∀
i
∈
{
1
,
⋯
,
n
}
:
r
i
=
d
i
e
i
\forall i\in\{1,\cdots,n\}:r_i=d_ie_i
∀i∈{1,⋯,n}:ri=diei
假设有足够大的
n
n
n,则batch modular inverse的计算量为:3 field multiplications per inverse。affine坐标系下,整个计算point addition的计算量为 6个field multiplication。
而projective坐标系下,对于short Weierstrass curve,其传统的mixed-addition需要 11个field multiplication。
参考资料
[1] 2020年论文 Proposal: The Turbo-PLONK program syntax for specifying SNARK programs
[2] 2013年论文 Fixed-Base Comb with Window-Non-Adjacent Form (NAF) Method for Scalar Multiplication

















 508
508

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









