







前言
昨天补全了树莓派初始化的博客,本专栏的模块就算是全啦!
欢迎大家把本专栏推荐给其他有兴趣学习树莓派的朋友!

从本博客开始,将不再讲述Geany编译器的简单操作,所有操作都用linux命令行解决
关注本专栏,和我一起学习树莓派开发板30+经典实验!
C语言代码,0基础剖析!
还等什么😍心动不如行动!👉点我关注
本专栏代码仓库📝:Raspberry-practice
1.实验器材
- 树莓派开发板
- 40p软排线+T型转接板+面包板
- 倾斜传感器模块
- 双色LED模块
- 跳线一堆
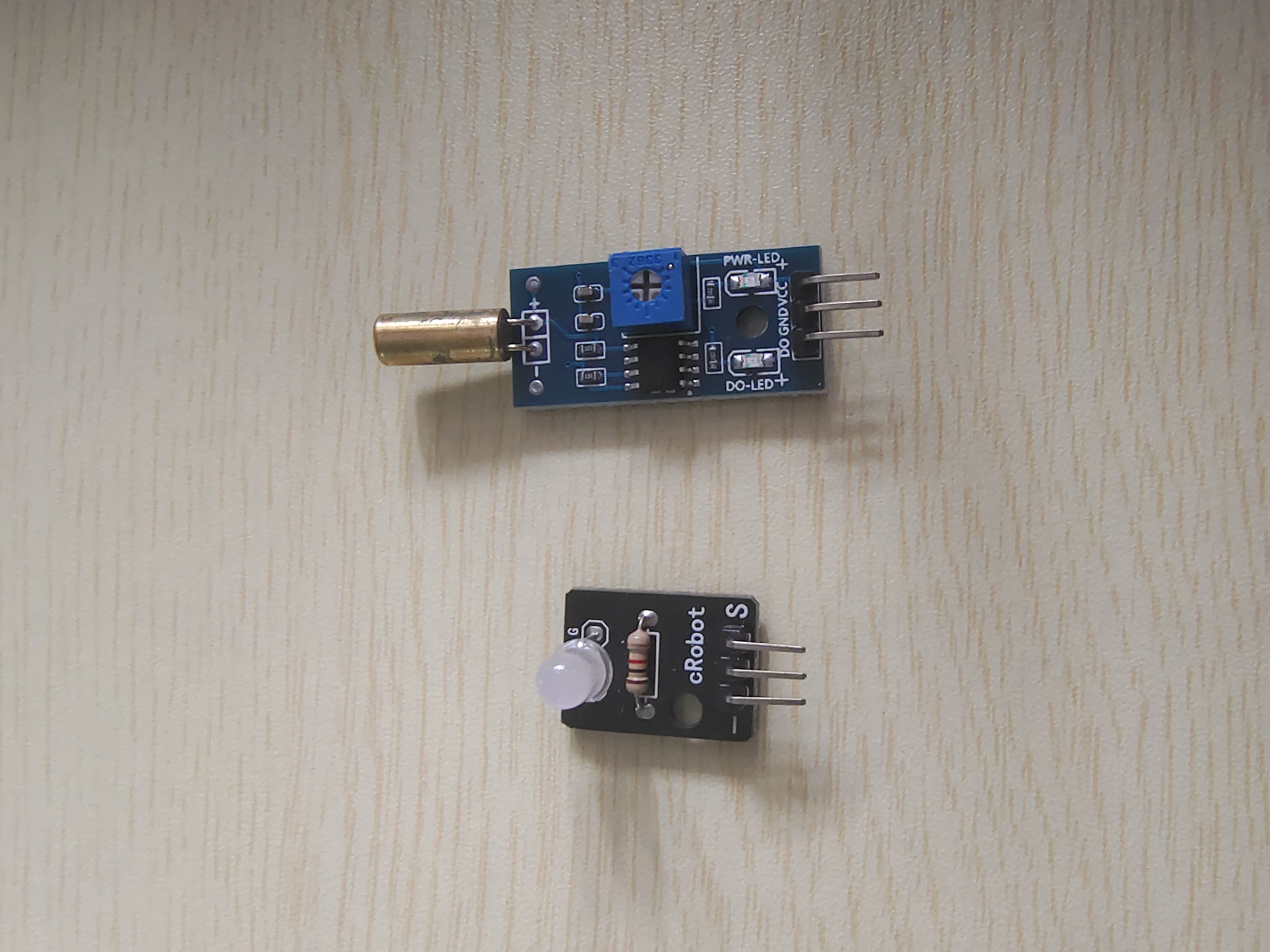
上:倾斜传感器;下:双色LED
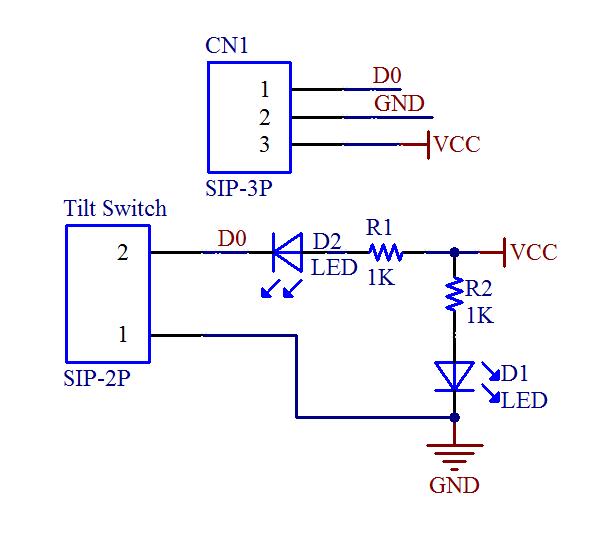
2.实验原理
在倾斜开关中,有一个金属球,它用于检测小角度的倾斜。倾斜开关模块的结构为双向传到的球形倾斜该关。只要倾斜度的力满足条件,开关就会通电,从而输出低电平信号。
2.1实验接线
| 树莓派 | T型转接板 | 倾斜开关 |
|---|---|---|
| GPIO 0 | GPIO 17 | Do |
| 5V | 5V | VCC |
| GND | GND | GND |
| 树莓派 | T型转接板 | 双色LED |
|---|---|---|
| GPIO 1 | GPIO 18 | R(中间) |
| GND | GND | GND(-) |
| GPIO 2 | GPIO 27 | G(S) |
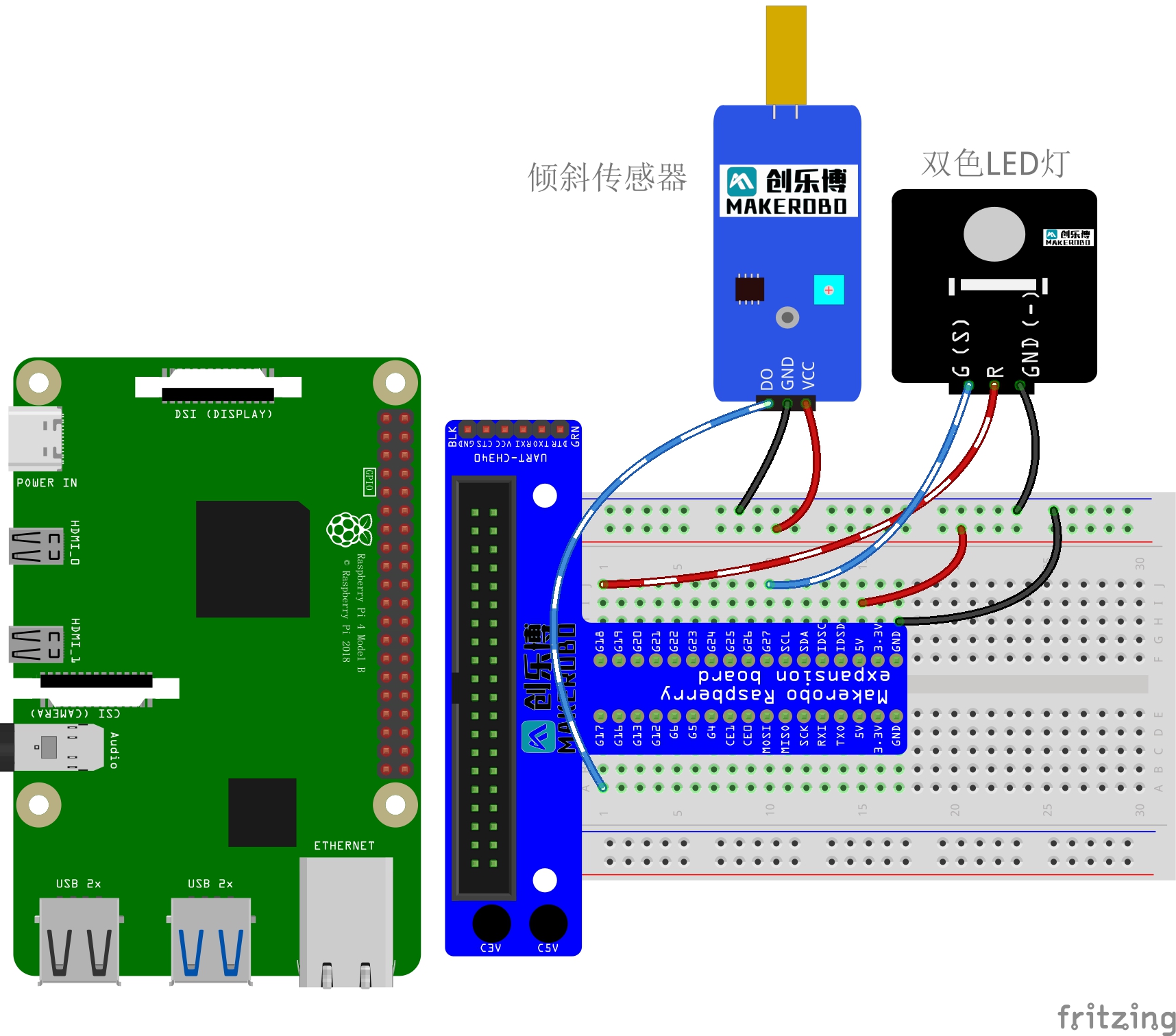
2.2实物接线图
接上排线后,倾斜开关模块的PWR-LED指示灯亮起
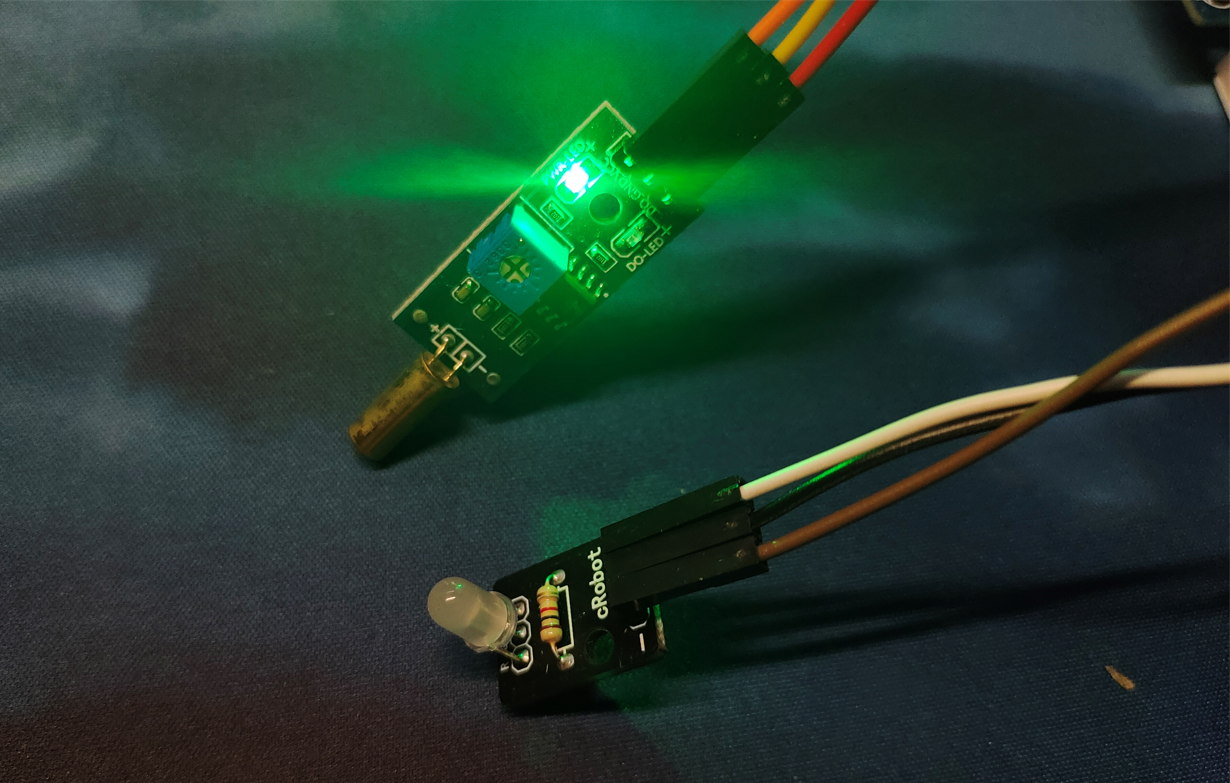
当检测到倾斜角度改变时,DO-LED也会亮起,这时Do管脚将输出低电平,对应值为0。后续程序的编写将用到这个原理

3.代码示例
下面给出C语言的示例代码
//倾斜传感器实验
#include <wiringPi.h>
#include <stdio.h>
#define makerobo_TiltPin 0 //倾斜传感器管脚定义
#define makerobo_Rpin 1 //红色LED模块管脚定义
#define makerobo_Gpin 2 //绿色LED模块管脚定义
//双色LED控制函数
void double_colorLED(char* color)
{
pinMode(makerobo_Rpin, OUTPUT); //设置为输出模式
pinMode(makerobo_Gpin, OUTPUT); //设置为输出模式
if (color == "makeroboRED") //点亮红色LED灯
{
digitalWrite(makerobo_Rpin, HIGH);
digitalWrite(makerobo_Gpin, LOW);
}
else if (color == "makeroboGREEN") //点亮绿色LED灯
{
digitalWrite(makerobo_Rpin, LOW);
digitalWrite(makerobo_Gpin, HIGH);
}
else
printf("Double color LED Error");
}
int main(void)
{
//初始化连接失败时,将消息打印到屏幕
if(wiringPiSetup() == -1){
printf("setup wiringPi failed !");
return 1;
}
//倾斜传感器Pin设置为输入模式
pinMode(makerobo_TiltPin, INPUT);
double_colorLED("makeroboGREEN");
while(1){
//如果没有检测到倾斜,输出高电平1
//检测到了之后,输出高电平0
if(0 == digitalRead(makerobo_TiltPin))
{ //倾斜传感器发生倾斜
delay(10); //倾斜传感器去除抖动处理
if(0 == digitalRead(makerobo_TiltPin)){
double_colorLED("makeroboRED"); // 点亮红色LED灯
printf("Tilt!\n"); // 打印出出现倾斜
}
}
else if(1 == digitalRead(makerobo_TiltPin))
{ // 倾斜传感器没有发生倾斜
delay(10);
if(1 == digitalRead(makerobo_TiltPin)){
while(!digitalRead(makerobo_TiltPin));
double_colorLED("makeroboGREEN"); // 点亮绿色LED灯
printf("No Tilt!\n"); // 打印没有出现倾斜
}
}
}
return 0;
}
3.1部分代码解释
去抖动操作
因为倾斜开关和轻触开关都是物理结构,需要有一定的延时来进行去抖动操作

直接用==比较字符串
(color == "makeroboGREEN")
这里用到了==直接比较字符串,之前我以为这样写是错误的,因为Linux-gcc报错了(但是可以编译出可执行文件,也能正常运行)
实际上这个在VS下是可以正常运行的,不会报错
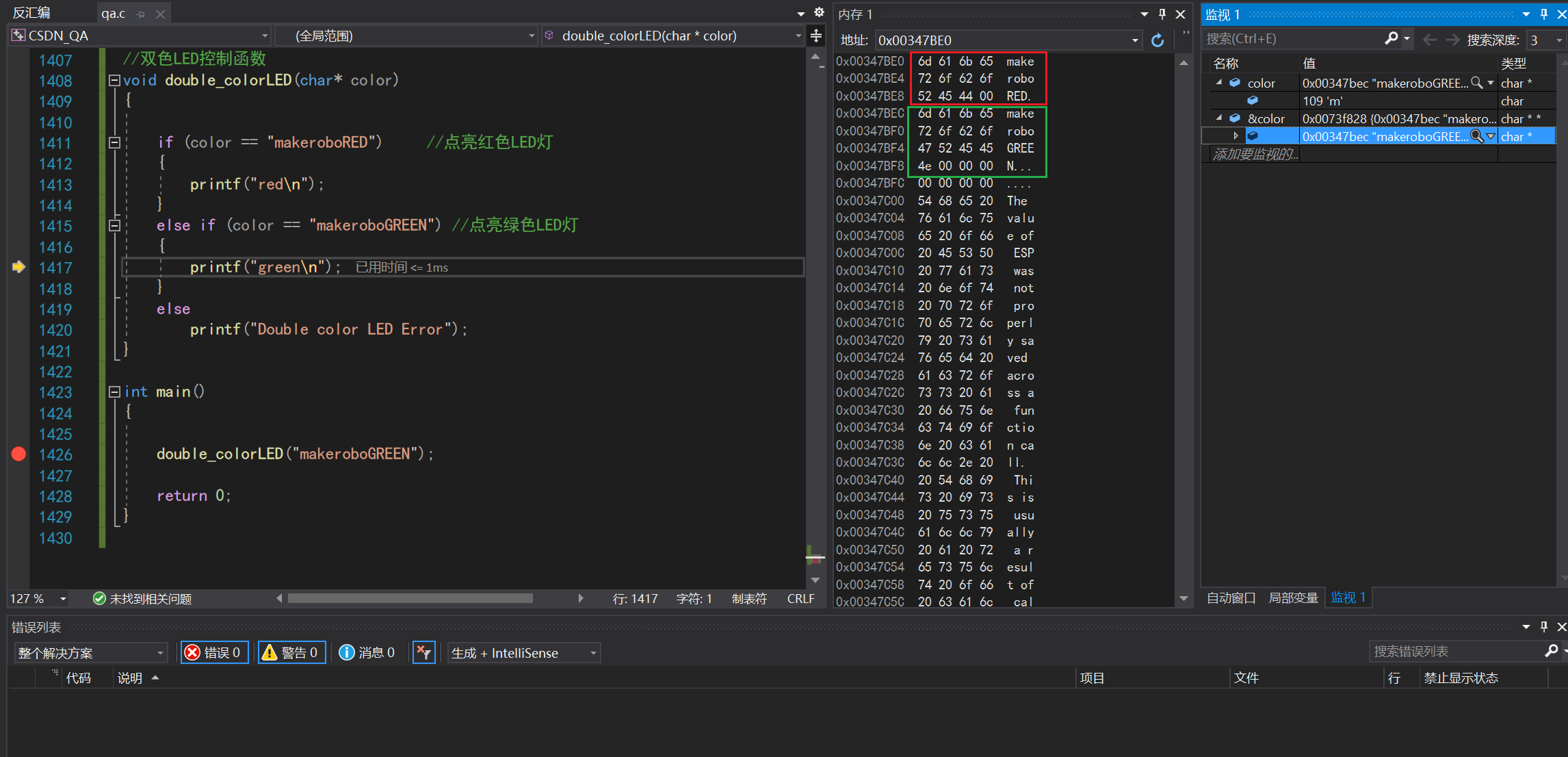
个人理解,这样直接传入字符串的操作,实际上是在函数中创建了一个形参color,接收了传过来的常量字符串,随后的==比较的其实是内存中的字符串的地址,而不是直接比较字符串本身
这个代码里面包含的wiringPi函数,在之前的博客中已经讲解过了,详情可以看实验06👉传送门
如果有不懂的,可以在评论区提出!
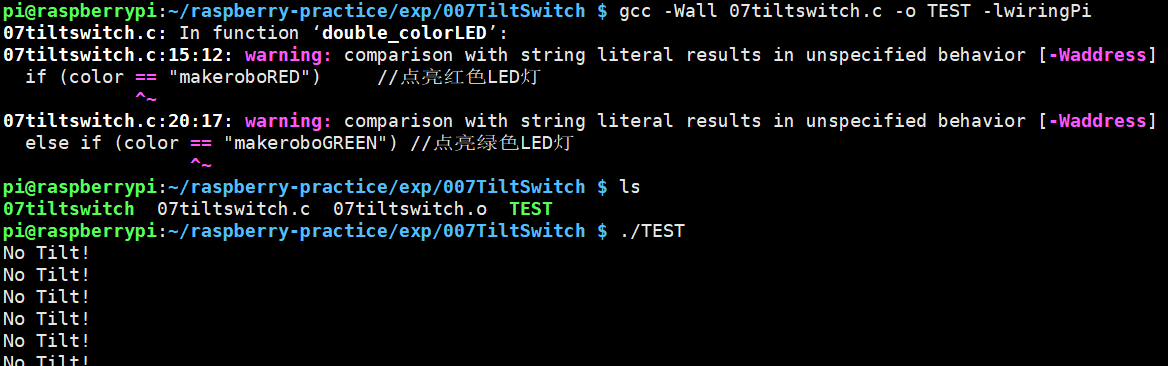
3.2 Linux编译运行代码
输入以下语句编译这个代码,生成可执行文件TEST
gcc -Wall 07tiltswitch.c -o TEST -lwiringPi
./TEST运行这个文件,按CTRL+C终止程序
3.3运行效果
抬起倾斜开关,LED亮绿灯。放下它后,变成默认的红灯
结语
本次实验到这里就结束啦!感觉这个倾斜开关就是手机中陀螺仪的青春版。
目前我设想的是,以后的小车实验中可以通过它来判断小车现在是在上坡还是在平地,如果在上坡,就加大马达的输出。嗯,应该是这样!

















 4195
4195











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











