








 在[从头学数学]系列中,工程师阿伟与机器小伟探讨了计算几何,本节主要介绍了计算几何的基础概念,并通过具体例子阐述了凸包的概念。故事在继续,敬请期待。
在[从头学数学]系列中,工程师阿伟与机器小伟探讨了计算几何,本节主要介绍了计算几何的基础概念,并通过具体例子阐述了凸包的概念。故事在继续,敬请期待。
剧情提要:
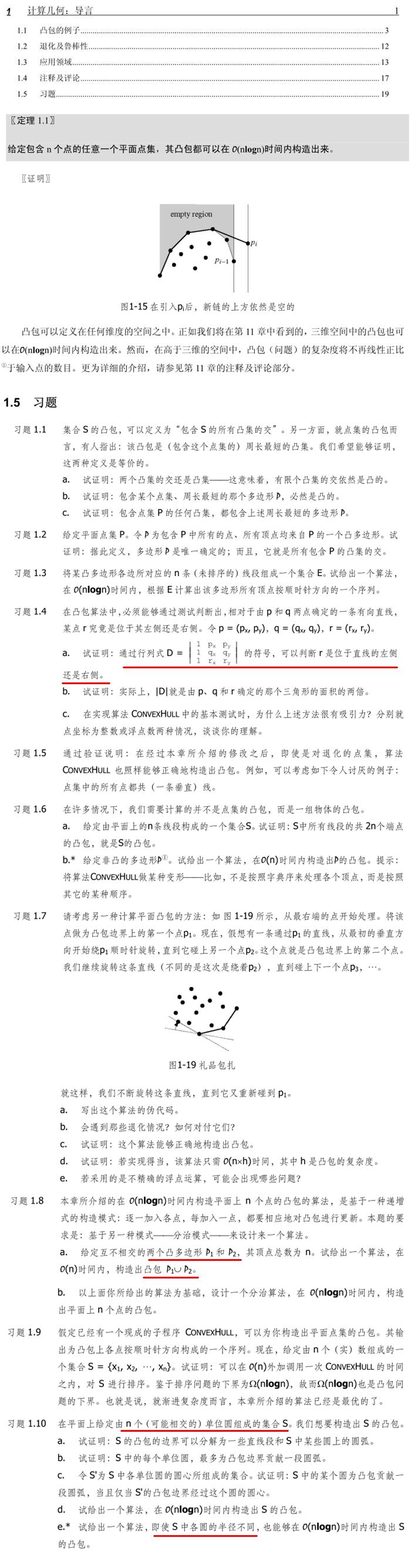
阿伟看到了一本比较有趣的书,是关于《计算几何》的,2008年由北清派出版。很好奇
它里面讲了些什么,就来看看啦。
正剧开始:
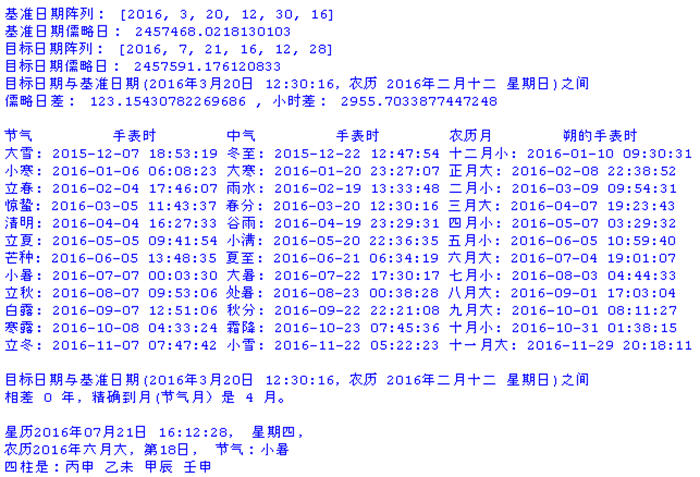
星历2016年07月21日 16:12:28, 银河系厄尔斯星球中华帝国江南行省。
阿伟看到了一本比较有趣的书,是关于《计算几何》的,2008年由北清派出版。很好奇
它里面讲了些什么,就来看看啦。
正剧开始:
星历2016年07月21日 16:12:28, 银河系厄尔斯星球中华帝国江南行省。
[工程师阿伟]正在和[机器小伟]一起研究[计算几何]]。
<span style="font-size:18px;">#凸包问题专题
class Convex():
#初始化
def initVector(self, point):
return np.array(point);
#一般在最后输出前进行圆整
def roundVector(self, array, precision = 3):
#precision是小数点后的位数
#array为[[x1, y1, (z1)], [x2, y2, (z2)], ...]这种点阵格式
dims = np.shape(array);
len_ = len(dims);
if (len_ == 0):
array = round(array, precision);
if (len_ == 1):
for i in range(dims[0]):
array[i] = round(array[i], precision);
elif (len_ == 2):
for i in range(dims[0]):
for j in range(dims[1]):
array[i][j] = round(array[i][j], precision);
elif (len_ == 3):
for i in range(dims[0]):
for j in range(dims[1]):
for k in range(dims[2]):
array[i][j][k] = round(array[i][j][k], precision);
return array;
#点P在有向线段Vec的左侧还是右侧
def side_P_Vec(self, Point, Vec):
Q, R = Vec[0], Vec[1];
P_x, P_y = Point[0], Point[1];
deter = np.array([[1, Q[0], Q[1]],
[1, R[0], R[1]],
[1, P_x, P_y]]);
det = np.linalg.det(deter);
#det < 0 右侧
#det = 0 点在直线上
#det > 0 左侧
return det;
#去除重复点
def removeDup(self, vertices):
v_new = [];
len_1 = len(vertices);
len_2 = 0;
for i in range(len_1):
len_2 = len(v_new);
if (len_2 < 1):
v_new.append(vertices[i]);
else:
for j in range(len_2):
if v_new[j] == vertices[i]:
break;
if (j >= len_2-1):
v_new.append(vertices[i]);
return v_new;
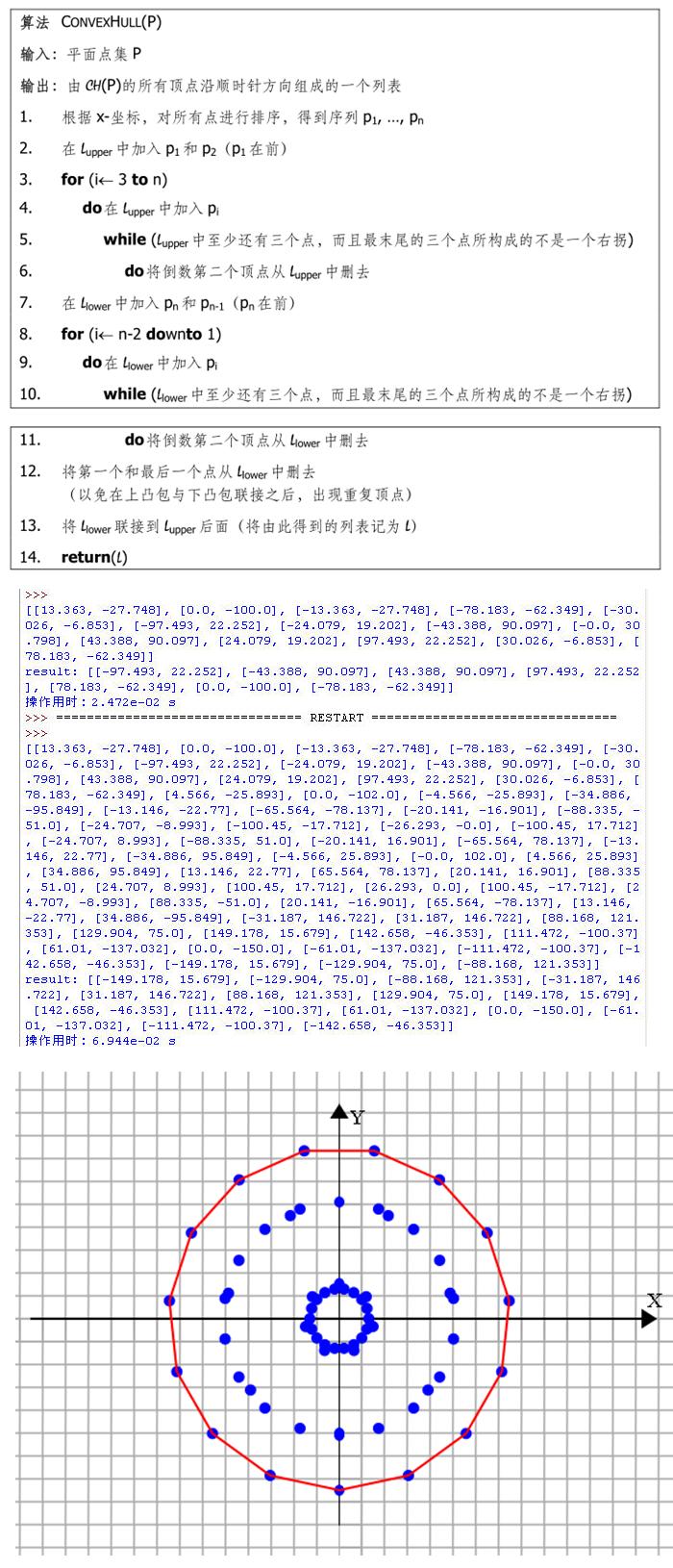
#二维点集的凸包
def convexHull(self, pointSet):
pointSet = self.roundVector(pointSet);
pointSet = self.removeDup(pointSet);
#按照x坐标由小到大排序,x相同时考虑y坐标
P = sorted(pointSet, key=lambda a:(a[0], a[1]));
num = len(P);
Lupper = [P[0], P[1]];
for i in range(2, num):
Lupper = Lupper + [P[i]];
while (len(Lupper) >= 3 and self.side_P_Vec(Lupper[-3], [Lupper[-2], Lupper[-1]])>=0):
Lupper = Lupper[:-2]+[Lupper[-1]];
Llower = [P[-1], P[-2]];
for i in range(num-2, -1, -1):
Llower = Llower + [P[i]];
while (len(Llower) >= 3 and self.side_P_Vec(Llower[-3], [Llower[-2], Llower[-1]])>=0):
Llower = Llower[:-2]+[Llower[-1]];
Llower = Llower[1:-1];
return Lupper+Llower;
def tmp():
calc = Convex();
shape = geo.Shape();
#计时开始
startTime = time.clock();
verts = shape.nStar(0, 0, 100, 7);
verts += shape.nStar(0, 0, 102, 18);
verts += shape.nEdge(0, 0, 150, 15);
verts = calc.roundVector(verts);
print(verts);
result = calc.convexHull(verts);
#计时结束
endTime = time.clock();
#打印结果
print('result:', result);
print('操作用时:{0:.3e} s'.format(endTime-startTime));
</span>
本节到此结束,欲知后事如何,请看下回分解。















 558
558

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









