







简介
凸包(Convex Hull)是一个计算几何(图形学)中的概念。
在一个实数向量空间V中,对于给定集合X,所有包含X的凸集的交集S被称为X的凸包。X的凸包可以用X内所有点(X1,...Xn)的线性组合来构造.
在二维欧几里得空间中,凸包可想象为一条刚好包著所有点的橡皮圈。
用不严谨的话来讲,给定二维平面上的点集,凸包就是将最外层的点连接起来构成的凸多边型,它能包含点集中所有的点。
例子:假设平面上有p0~p12共13个点,过某些点作一个多边形,使这个多边形能把所有点都“包”起来。当这个多边形是凸多边形的时候,我们就叫它“凸包”。如下图:

算法
Graham扫描法
时间复杂度:O(n㏒n)
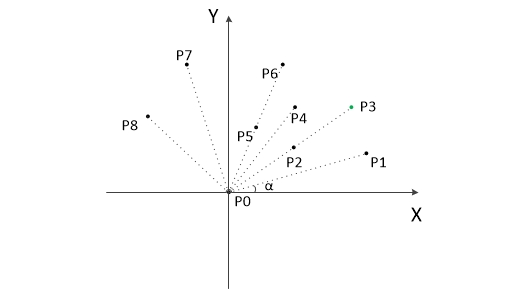
思路:Graham扫描的思想是先找到凸包上的一个点,然后从那个点开始按逆时针方向逐个找凸包上的点,实际上就是进行极角排序,然后对其查询使用。如下图:
计算步骤:
1. 把所有点放在二维坐标系中,则纵坐标最小的点一定是凸包上的点,如图中的P0。
2. 把所有点的坐标平移一下,使 P0 作为原点,如上图
3. 计算各个点相对于 P0 的幅角 α ,按从小到大的顺序对各个点排序。当 α 相同时,距离 P0 比较近的排在前面。例如上图得到的结果为 P1,P2,P3,P4,P5,P6,P7,P8。我们由几何知识可以知道,结果中第一个点 P1 和最后一个点 P8 一定是凸包上的点。
以上,我们已经知道了凸包上的第一个点 P0 和第二个点 P1,我们把它们放在栈里面。现在从步骤3求得的那个结果里,把 P1 后面的那个点拿出来做当前点,即 P2 。接下来开始找第三个点:
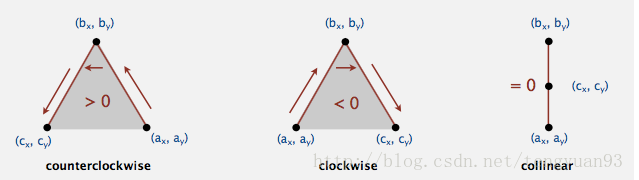
4. 连接P0和栈顶的那个点,得到直线 L 。看当前点是在直线 L 的右边还是左边。如果在直线的右边就执行步骤5;如果在直线上,或者在直线的左边就执行步骤6。
5. 如果在右边,则栈顶的那个元素不是凸包上的点,把栈顶元素出栈。执行步骤4
6. 当前点是凸包上的点,把它压入栈,执行步骤7。
7. 检查当前的点 P2 是不是步骤3那个结果的最后一个元素。是最后一个元素的话就结束。如果不是的话就把 P2 后面那个点做当前点,返回步骤4。
最后,栈中的元素就是凸包上的点了。
以下为用Graham扫描法动态求解的过程: 重点!!!
下面静态求解过程:
convexHull函数
convexHull函数原型如下:
void convexityDefects( InputArray contour, InputArray convexhull, OutputArray convexityDefects );
三个参数说明如下:
contour:一般就是轮廓检测函数findContours的输出
convexhull:convexHull函数的输出,里面存储的是凸包信息,在这里只能是int类型(即vector<vector<int>>类型),而不能是vector<vector<Point>>类型!
convexityDefects :类型为vector<vector<Vec4i>>类型,每一个凸包缺陷由N个Vec4i来描述,直观上来看每一个Vec4i实际上就是一系列点。
代码:
img = cv.imread('aaa.jpg', 1)
imgray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
ret, dst = cv.threshold(imgray, 127, 255, 0)
contours,hierarchy = cv.findContours(dst, cv.RETR_LIST, cv.CHAIN_APPROX_SIMPLE)
cnt = contours[601]
hull = cv.convexHull(cnt,returnPoints = False)
defects = cv.convexityDefects(cnt,hull)
for i in range(defects.shape[0]):
s,e,f,d = defects[i,0]
start = tuple(cnt[s][0])
end = tuple(cnt[e][0])
far = tuple(cnt[f][0])
cv.line(img,start,end,[0,255,0],2)
cv.circle(img,far,5,[0,0,255],-1)
cv.imshow('img:',img)
cv.waitKey(0)
cv.destroyAllWindows()运行结果如下:

















 2901
2901











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









