






学习数值分析与电路分析后的练手程序,较粗糙。 没有 加入更多电器元件的数学模型,如二极管、三极管、放大器、数字器件等等。
m脚本在:gittee仓库;
编程实现电路仿真,使用Matlab 。
背景:
电网络分析课程中,学习了电路的矩阵形式,和数值求解方法;数值分析课程了解了数值计算的概念和一些数值算法思想。于是我想,如何编程实现电路的仿真呢?
搞清几个概念
总是理不清思路:编程计算电路?理论分析电路?怎么转换呢?有什么不一样吗?得到各参数变量与待求量之间的关系?得到不同电路参数下的解???
所以首先要明确模糊的概念,以便理清思路。
数值计算
利用计算机求解数学问题,称为数值计算。计算机可以大量、快速的运算,但是它是基于硬件结构的机械式计算,不同于人的计算(更高级、更灵活、更包容、更连续)。
需要考虑到计算机计算与编程的特点,设计恰当的数学模型、合适的数值计算方法和形式。
求解
求解即已知题目求解答案。有得到精确解析解的数值计算方法,也有迭代近似解的数值方法。计算只是个过程,重要的是,题目是什么,想要得到什么样的结果?
需要确定什么是已知的,什么是未知的。再理清求解思路:先分析,列出已知条件,然后计算出结果,再进一步得到更多结果,这才是完整的逻辑。这个逻辑是理论(课程)中学到的,这说明理论与求解是相辅相成的,理论上的分析虽然不需要数值计算,但没有算例验证理论,可信度也不高;同时,算例数据可以直观的反映出问题的特点,给分析带来参考,有助于得出结论。
仿真
计算机仿真:一般以时间为变量,将仿真过程分成极短的片段,求解出每一时刻的状态近似作为对应片段内的状态。从而近似得到整个过程中任意时刻的状态。
而求解得到的是一个问题的答案(一个电路状态信息),而仿真需要每个时间片段的答案(每个时刻电路的状态信息),这意味着“连续求解”一个“连续的题目”,需要将前一个问题的答案作为已知去求解当前问题。
一次仿真,得到的往往是大量的求解,仿真的结果应当是连续的(连续的时间序列)、大量的解的集合(按照时间序列依次求解的解序列)。
思路
清楚上面的概念后,我理清了思路:
- 理论分析电路,编写能求解“某时刻电路”的程序(单次求解);
- 加入相邻时刻间的变量更新,在时间序列的每个时刻求解,实现电路仿真(连续多次求解);
- 改变电路参数,得到相应结果,解析法验证(计算算例,通过理论计算验证)。
具体实行
这是最难的一部分:概念上,混淆了求解与仿真;思想上,纠结于解析法,而忽略数值方法;实现上,多方面知识结合。
描述瞬时电路
利用图论的概念描述电网络,形成网络线图(G图):
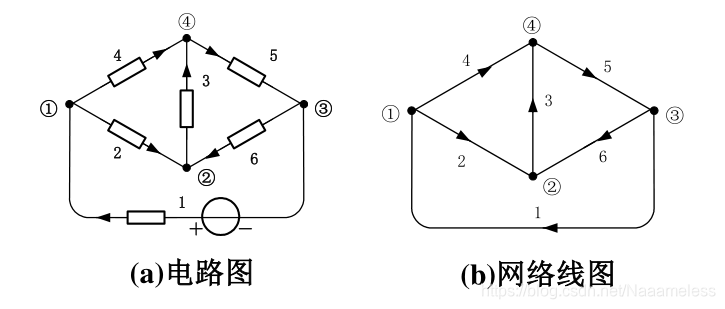
- 抽象出节点和支路
- 每一元件为一条支路
- 各支路标有方向箭头(自指定方向)
利用电网络理论的知识,可得到电路的关联矩阵
A
\boldsymbol A
A,用于描述电路的拓扑结构。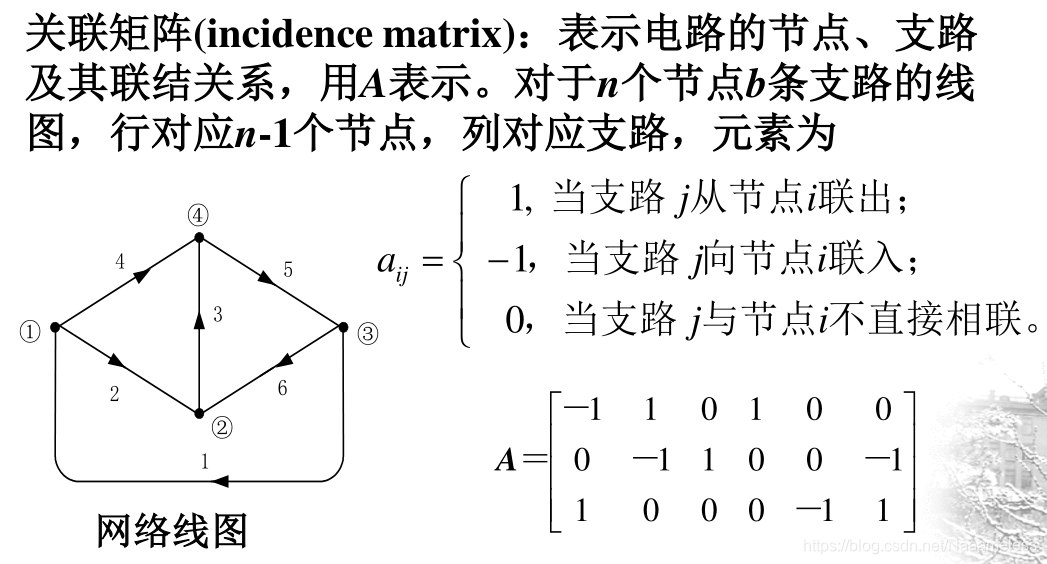
- A = { a i j } {\boldsymbol A} = \{a_{ij}\} A={aij}
- a i j = 1 a_{ij} = 1 aij=1:支路 j 箭头指向节点 i
- a i j = − 1 a_{ij}=-1 aij=−1:支路 j 箭头背离节点 i
- a i j = 0 a_{ij}=0 aij=0:支路 j 不与节点 i 关联
若有N+1个节点,M条支路,a个电导(电阻),b个电压源(包括电容),c个电流源(包括电感),
并考虑到极短时间内各参数不变,有以下矩阵:
-
U
s
{\boldsymbol U}_{\rm s}
Us:支路源电压向量(已知)
- U s = [ u s 1 , u s 2 , ⋯ , u s M ] T {\boldsymbol U}_{\rm s} = [u_{\rm s1}, u_{\rm s2},\cdots,u_{\rm sM}]^{\rm T} Us=[us1,us2,⋯,usM]T
- u s k u_{{\rm s}k} usk :第 k 条支路的电压源电压,符号以G图对应支路的参考方向为正;k = 1 ~ M
- 电容视为电压源,其值为初始电压
- 无电压源或电容则为0
-
I
s
{\boldsymbol I}_{\rm s}
Is:支路源电流向量(已知)
- I s = [ i s 1 , i s 2 , ⋯ , i s M ] T {\boldsymbol I}_{\rm s} = [{i_{\rm s1}}, i_{\rm s2},\cdots,i_{\rm sM}]^{\rm T} Is=[is1,is2,⋯,isM]T
- i s k i_{{\rm s}k} isk:第 k 条支路的电流源电流,符号以G图对应支路的参考方向为正;k = 1 ~ M
- 电感视为电流源,其值为初始电流
- 无电流源或电感则为0
-
Y
\boldsymbol Y
Y:支路电导矩阵(已知)
- Y = d i a g [ y 1 y 2 ⋯ y M ] {\boldsymbol Y} = {\rm diag}[y_1~y_2~\cdots~y_{\rm M}] Y=diag[y1 y2 ⋯ yM]
- y k y_k yk:第 k 条支路的电导;k = 1 ~ M
- 电阻转化为电导,无电导则为0
- 好像含受控源的电路的受控关系可以用电导矩阵表示出来(没研究)
-
U
\boldsymbol U
U:支路电压向量(未知)
- U = [ u 1 , u 2 , ⋯ , u M ] T {\boldsymbol U} = [u_1, u_2, \cdots, u_{\rm M}]^{\rm T} U=[u1,u2,⋯,uM]T
- u k u_k uk:第 k 条支路的电压,符号以G图对应支路的参考方向为正;k = 1 ~ M
-
I
\boldsymbol I
I:支路电流向量(未知)
- I = [ i 1 , i 2 , ⋯ , i M ] T {\boldsymbol I} = [i_1,i_2,\cdots,i_{\rm M}]^{\rm T} I=[i1,i2,⋯,iM]T
- i k i_k ik:第 k 条支路的电流,符号以G图对应支路的参考方向为正;k = 1 ~ M
-
U
n
{\boldsymbol U}_{\rm n}
Un:节点电压向量(未知)
- U n = [ u n 1 , u n 2 , ⋯ , u n N ] T {\boldsymbol U}_{\rm n} = [u_{\rm n1},u_{\rm n2},\cdots,u_{\rm nN}]^{\rm T} Un=[un1,un2,⋯,unN]T
- u n k u_{{\rm n}k} unk:第 k 个节点的电压;k = 0 ~ N
- u n 0 u_{{\rm n}0} un0:0号节点为参考节点
求解瞬时电路
将电容器和电感器分别看作电压源和电流源,“瞬间”(极短的时间,不是时刻)电路近似为一个只有电源和电阻组成的直流电路。
我只想到了网孔电流法和节点电压法,相比之下,节点电压法不需要“确定网孔”环节,故使用节点电压法。
由电路的 KCL 可知:
A
I
=
0
(1)
\boldsymbol {AI}=\bf 0 \tag 1
AI=0(1)
支路电压可用节点电压表示:
U
=
A
T
U
n
(2)
{\boldsymbol U} = {\boldsymbol A}^{\rm T} {\boldsymbol U}_{\rm n} \tag 2
U=ATUn(2)
支路电流可以分为电导支路电流、电压源支路电流、电流源支路电流三个部分:
I
=
Y
U
+
I
s
+
I
u
(3)
{\boldsymbol I} = \boldsymbol {YU} + {\boldsymbol I}_{\rm s} + \boldsymbol {I}_{\rm u} \tag 3
I=YU+Is+Iu(3)
其中
I
u
\boldsymbol {I}_{\rm u}
Iu是除电压源支路以外的支路电流均为0的支路电流向量。
联立(1)(2)(3),消去的矩阵
U
{\boldsymbol U}
U和
I
{\boldsymbol I}
I,得
A
Y
A
T
U
n
+
A
I
u
+
A
I
s
=
0
(4)
\boldsymbol {AYA}^{\rm T} \boldsymbol{U}_{\rm n} + \boldsymbol {AI}_{\rm u} + \boldsymbol {AI}_{\rm s} = 0 \tag 4
AYATUn+AIu+AIs=0(4)
在(4)表示的方程组中,
U
n
\boldsymbol{U}_{\rm n}
Un与
I
u
\boldsymbol{I}_{\rm u}
Iu是待求量,有 N + b 个;独立方程数是 N 个(
A
\boldsymbol A
A行数)。
显然,
U
s
\boldsymbol U_{\rm s}
Us这个已知量还没有用到。
支路电压也可分为电导支路电压、电压源支路电压、电流源安支路电压三个部分:
U
=
U
y
+
U
s
+
U
i
(5)
\boldsymbol U = \boldsymbol {U}_{\rm y} + \boldsymbol {U}_{\rm s} + \boldsymbol {U}_{\rm i} \tag 5
U=Uy+Us+Ui(5)
其中
U
y
\boldsymbol U_{\rm y}
Uy和
U
i
\boldsymbol U_{\rm i}
Ui分别是除电导支路以外的支路电压均为0的支路电压向量,和除电流源支路以外的支路电压均为0的之路电压向量。
由(2)和(5)可得,
A
T
U
n
=
U
y
+
U
s
+
U
i
\boldsymbol A^{\rm T} \boldsymbol U_{\rm n} = \boldsymbol {U}_{\rm y} + \boldsymbol {U}_{\rm s} + \boldsymbol {U}_{\rm i}
ATUn=Uy+Us+Ui
取出该 方程组 中,等号右侧是已知的
u
s
u_{\rm s}
us的方程,表示为:
B
U
n
=
U
s
′
(6)
\boldsymbol B \boldsymbol U_{\rm n} = \boldsymbol U'_{\rm s} \tag 6
BUn=Us′(6)
其中,
B
\boldsymbol B
B和
U
s
′
\boldsymbol U'_{\rm s}
Us′分别是
A
T
\boldsymbol A^{\rm T}
AT和
U
s
\boldsymbol U_{\rm s}
Us删除
U
s
\boldsymbol U_{\rm s}
Us中0所在行得到的。
(6)所表示的方程组中,未知量是
U
n
\boldsymbol U_{\rm n}
Un,独立方程数为 b ,即电压源支路的个数。
将(4)和(6)组成方程组,
{
A
Y
A
T
U
n
+
A
I
u
=
−
A
I
s
B
U
n
=
U
s
′
\left \{ \begin{matrix} \boldsymbol {AYA}^{\rm T} \boldsymbol{U}_{\rm n} + \boldsymbol {AI}_{\rm u} = - \boldsymbol {AI}_{\rm s} \\ \boldsymbol B \boldsymbol U_{\rm n} = \boldsymbol U'_{\rm s} \end{matrix} \right.
{AYATUn+AIu=−AIsBUn=Us′
其矩阵形式为:
[
A
Y
A
T
A
B
0
]
[
U
n
I
u
]
=
[
−
A
I
s
U
s
′
]
(7)
\begin{bmatrix} \boldsymbol {AYA}^{\rm T} & \boldsymbol A \\ \boldsymbol B & 0 \end{bmatrix} \begin{bmatrix} \boldsymbol U_{\rm n} \\ \boldsymbol I_{\rm u} \end{bmatrix} = \begin{bmatrix} \boldsymbol -{AI}_{\rm s} \\ \boldsymbol U'_{\rm s} \end{bmatrix} \tag 7
[AYATBA0][UnIu]=[−AIsUs′](7)
当当当! 该方程组有 N + b 个未知量,N + b 个独立方程,可解出
U
n
\boldsymbol U_{\rm n}
Un和
I
u
\boldsymbol I_{\rm u}
Iu。
还可以进一步精简
A
I
u
\boldsymbol {AI}_{\rm u}
AIu部分的形式:
根据
I
u
\boldsymbol I_{\rm u}
Iu中0行的位置,删去
A
I
u
\boldsymbol {AI}_{\rm u}
AIu部分中系数矩阵
A
\boldsymbol A
A无用的列,和
I
u
\boldsymbol I_{\rm u}
Iu中无用的行,
表示为
D
I
u
′
\boldsymbol {DI}'_{\rm u}
DIu′,则(7)可写为
[
A
Y
A
T
D
B
0
]
[
U
n
I
u
′
]
=
[
−
A
I
s
U
s
′
]
(8)
\begin{bmatrix} \boldsymbol {AYA}^{\rm T} & \boldsymbol D \\ \boldsymbol B & 0 \end{bmatrix} \begin{bmatrix} \boldsymbol U_{\rm n} \\ \boldsymbol I'_{\rm u} \end{bmatrix} = \begin{bmatrix} \boldsymbol -{AI}_{\rm s} \\ \boldsymbol U'_{\rm s} \end{bmatrix} \tag 8
[AYATBD0][UnIu′]=[−AIsUs′](8)
将它们分别回代到(2)和(3)则得到电路的此时的所有信息。
更新动态元件初始值
对于含动态元件(一般为电容、电感)的电路,每个瞬间里动态元件的电压和电流都在改变。
所以在每个瞬间电路求解完后,要利用求得的解对动态元件的初始值更新,作为下一瞬间动态元件的初值状态。
易知电容和电感的微分方程可写为:
d
u
C
=
1
C
i
C
d
t
d
i
L
=
1
L
u
L
d
t
{\rm d}u_{\rm C} = \frac 1C i_{\rm C} {\rm d}t \\ {\rm d}i_{\rm L} = \frac 1L u_{\rm L} {\rm d}t
duC=C1iCdtdiL=L1uLdt
其中
d
t
{\rm d}t
dt可近似看作是一个“瞬间”的时间,在计算中称为步长,设为
Δ
t
\Delta t
Δt,即
d
t
=
Δ
t
{\rm d}t = \Delta t
dt=Δt。
则得到电容电压变化量
Δ
u
C
\Delta u_{\rm C}
ΔuC和电感电流变化量
Δ
i
L
\Delta i_{\rm L}
ΔiL的表达式:
Δ
u
C
=
1
C
i
C
Δ
t
(8)
\Delta u_{\rm C} = \frac 1C i_{\rm C} \Delta t \tag 8
ΔuC=C1iCΔt(8)
Δ i L = 1 L u L Δ t (9) \Delta i_{\rm L} = \frac 1L u_{\rm L} \Delta t \tag 9 ΔiL=L1uLΔt(9)
其中 i C i_{\rm C} iC和 u L u_{\rm L} uL分别是电容支路的电流和电感支路的电压,可从 I \boldsymbol I I与 U \boldsymbol U U中得到。
每次求解后,对每个电容的初始电压根据(8)式更新,每个电感的初始电流根据(9)式更新:
u
C
=
u
C
+
Δ
u
C
(10)
u_{\rm C} = u_{\rm C} + \Delta u_{\rm C} \tag {10}
uC=uC+ΔuC(10)
i L = i L + Δ i L (11) i_{\rm L} = i_{\rm L} + \Delta i_{\rm L} \tag {11} iL=iL+ΔiL(11)
编程实现
使用 matlab 实现。
输入与输出
仿真电路需要输入:电路结构模型、信号源(电源)信号、仿真时间、动态元件初始值;
输出:电路的节点电压、支路电压、支路电流矩阵,包含历史记录。
电路结构
| 变量 | 规模 | 说明 | 意义 |
|---|---|---|---|
| A \boldsymbol A A | n × b n \times b n×b | 节点支路的关联情况 行数 = 节点数,列数 = 支路数 | 电路线图的关联矩阵 |
| Y \boldsymbol Y Y | b b b | 支路电导分布在对角线上 不可为空向量 | 支路电导向量 |
| C \boldsymbol C C | b b b | 支路上的电容值,单位 F 非电容支路值为 0 | 支路电容向量 |
| L \boldsymbol L L | b b b | 支路上的电感值,单位 H 非电感支路值为 0 | 支路电感向量 |
信号源
| 变量 | 规模 | 说明 | 意义 |
|---|---|---|---|
| U s s \boldsymbol U_{\rm ss} Uss | b b b | 支路恒压源电压值,单位 V 非恒压源支路值为 0 不可为空向量 | 支路恒压源电压向量 |
| I s s \boldsymbol I_{\rm ss} Iss | b b b | 支路恒流源电流值,单位 V 非恒流源支路值为 0 不可为空向量 | 支路恒流源电压向量 |
| U d s \boldsymbol U_{\rm ds} Uds | u d s × ( 1 + T ) uds\times (1+T) uds×(1+T) | 第一列是索引 其余列是电压源随时间的输入数据 单位 V u d s uds uds:变化的电压源数 T T T:时间步数 | 指定变化电压源的 位置和时变信号 |
| I d s \boldsymbol I_{\rm ds} Ids | i d s × ( 1 + T ) ids \times (1+T) ids×(1+T) | 第一列是索引 其余列是电流源随时间的输入数据 单位 A u d s uds uds:变化的电流源数 T T T:时间步数 | 指定变化电流源的 位置和时变信号 |
仿真时间序列
| 变量 | 规模 | 说明 | 意义 |
|---|---|---|---|
| T s e q \boldsymbol T_{\rm seq} Tseq | T T T | 时刻组成的序列,单位 s | 仿真的时间序列 |
初始值
| 变量 | 规模 | 说明 | 意义 |
|---|---|---|---|
| U c \boldsymbol U_c Uc | c c c | 仿真开始前,各电容的初始值 | 电容初始值的向量 |
| I l \boldsymbol I_l Il | l l l | 仿真开始前,各电感的初始值 | 电感初始值的向量 |
输出
| 变量 | 规模 | 说明 | 意义 |
|---|---|---|---|
| U n \boldsymbol U_{\rm n} Un | n × T n \times T n×T | 每一时刻的节点电压向量组成的矩阵 | 节点电压矩阵 |
| U \boldsymbol U U | b × T b \times T b×T | 每一时刻的支路电压向量组成的矩阵 | 支路电压矩阵 |
| I \boldsymbol I I | b × T b \times T b×T | 每一时刻的支路电流向量组成的矩阵 | 支路电流矩阵 |
数据处理
处理输入信息,生成必要中间变量,构建求解矩阵。
初始化
- 根据输入变量的个数判断所描述电路的类型
- 根据电路求解类型,恰当设置其余变量的值
- 没有用到的变量赋予空,如
U_ds = []
- 输入变量形式转化
- 转化为向量形式,如
U_ss = U_ss(:)等 - 转化为矩阵形式,
Y = diag(Y)
- 转化为向量形式,如
- 提取出 T s e q \boldsymbol T_{\rm seq} Tseq的长度与步长
- 确定
U
\boldsymbol U
U和
I
\boldsymbol I
I矩阵的规模,即是输出矩阵,又作为相关变量的存储矩阵
- 将已知的支路电压和支路电流填入其中
- 在填入前,应判断变量是否存在,或填入空的变量是否影响计算,再决定是否填入
-
U
s
s
\boldsymbol U_{\rm ss}
Uss是支路恒压源电压向量,长度 = 支路数,不随时间变化
- 可用来创建
U
\boldsymbol U
U :
U = repmat(U_ss, 1, T) - 同时,要创建恒压源支路的索引:
U_ss_idx = find(U_ss)
- 可用来创建
U
\boldsymbol U
U :
-
U
d
s
\boldsymbol U_{\rm ds}
Uds是变压源向量,第一列是支路位置索引,其余是对应时刻数值
- 提取变压源索引:
U_ds_idx = U_ds(:, 1) - 放入
U
\boldsymbol U
U:
U(U_ds_idx,:) = U_ds(:, 2:end)
- 提取变压源索引:
-
U
c
\boldsymbol U_{\rm c}
Uc是电容初始值向量
- 可通过支路电容向量
C
\boldsymbol C
C找到其支路位置索引:
C_idx = find(C) - 放入
U
\boldsymbol U
U:
U(C_idx, 1) = U_c
- 可通过支路电容向量
C
\boldsymbol C
C找到其支路位置索引:
-
I
s
s
\boldsymbol I_{\rm ss}
Iss是支路恒流源电流向量,长度 = 支路数,不随时间变化
- 可用来创建
I
\boldsymbol I
I :
I = repmat(I_ss, 1, T) - 同时,要创建恒压源支路的索引:
I_ss_idx = find(I_ss)
- 可用来创建
I
\boldsymbol I
I :
-
I
d
s
\boldsymbol I_{\rm ds}
Ids是变压源向量,第一列是支路位置索引,其余是对应时刻数值
- 提取变压源索引:
I_ds_idx = I_ds(:, 1) - 放入
I
\boldsymbol I
I:
I(I_ds_idx,:) = I_ds(:, 2:end)
- 提取变压源索引:
-
I
l
\boldsymbol I_{\rm l}
Il是电感初始值向量
- 可通过支路电感向量
L
\boldsymbol L
L找到其支路位置索引:
L_idx = find(L) - 放入
I
\boldsymbol I
I:
I(L_idx, 1) = I_l
- 可通过支路电感向量
L
\boldsymbol L
L找到其支路位置索引:
- 除了上述索引,还有构建求解方程组要用到的索引
- 电压源和电容支路的索引:
U_sc_idx = [U_ss_idx; C_idx; U_ds_idx] - 电流源和电感支路的索引:
I_sl_idx = [I_ss_idx; L_idx; I_ds_idx]
- 电压源和电容支路的索引:
构建方程组的系数矩阵
系数矩阵固定不变,方程组(8)的系数矩阵为:
[
A
Y
A
T
D
B
0
]
\begin{bmatrix} \boldsymbol {AYA}^{\rm T} & \boldsymbol D \\ \boldsymbol B & 0 \end{bmatrix}
[AYATBD0]
实现方式为:
AT = A'; % A 的转置矩阵
Y = diag(Y); % 电导向量转化为对角矩阵
B = AT(U_sc_idx,:); % 已知的节点电压关系矩阵
D = A(:,U_sc_idx); % KCL 中电压源和电容支路电流的系数矩阵
R = [A*Y*AT D; B zeros(length(B(:,1)),length(D(1,:)))]; % 构建求解方程组的矩阵
迭代求解与记录
使用for循环遍历时间序列。每一时刻(每一步)都进行一次求解,将结果填入
U
n
U
I
\boldsymbol U_{\rm n} ~ \boldsymbol U ~\boldsymbol I
Un U I矩阵的相应列。
方程的常数项
方程组的常数项向量为:
[
−
A
I
s
U
s
′
]
\begin{bmatrix} \boldsymbol -{AI}_{\rm s} \\ \boldsymbol U'_{\rm s} \end{bmatrix}
[−AIsUs′]
常数项向量中的变化源、电容电压、电感电流是随时间变化的,
每次求解前都需要读取当前时刻(t时刻)的值:
I_sl = zeros(b, 1); % I_sl 电流源和电感支路的电流向量
I_sl(I_sl_idx) = I(I_sl_idx,t); % 更新常数项
U_sc = U(U_sc_idx,t); %
I_sl即是
I
s
\boldsymbol I_{\rm s}
Is,长度为
b
b
b,除电流源和电感支路的电流以外,其他支路均为0。
U_sc即是
U
s
′
\boldsymbol U'_{\rm s}
Us′,长度为电压源和电容个数之和,可以为空;电压源和电容的电压向量。
求解和记录
求解方程组得到的向量是:
[
U
n
I
u
′
]
\begin{bmatrix} \boldsymbol U_{\rm n} \\ \boldsymbol I'_{\rm u} \end{bmatrix}
[UnIu′]
U
n
\boldsymbol U_{\rm n}
Un是此刻的节点电压向量,
I
u
′
\boldsymbol I'_{\rm u}
Iu′是此刻电压源和电容的电流;
根据方程组(2)得到此刻的
U
\boldsymbol U
U,再根据(3)得到此刻的
I
\boldsymbol I
I;
最后通过公式(10)、(11)分别更新电容的电压值、电感的电流值,作为下一时刻的初始值。
实现:
temp = R\[-A*I_sl; U_sc]; % 求解方程
U_n(:,t) = temp(1:sizeA(1)); % 得到 t 时刻的 U_n
U(:,t) = AT*U_n(:,t); % 得到 t 时刻的 U
temp(1:sizeA(1)) = []; % 删除结果中 U_n 的部分
I_sc = temp; % 得到 I_sc
I(U_sc_idx,t) = I_sc; % 将 t 时刻的 I_sc 添加到 I
I(:,t) = I(:,t) + Y*U(:,t); % 得到 t 时刻的 I
if t < length(T_seq) % 最后一次不需要计算电容或电感的值
a = T_seq(t+1) - T_seq(t); % 计算步长
U_c = U_c + a.*I(C_idx,t)./C(C_idx); % 更新 U_c I(C_idx,t)即是电容的电流向量
I_l = I_l + a.*U(L_idx,t)./L(L_idx); % 更新 I_l U(L_idx,t)即是电感的电压向量
U(C_idx, t+1) = U_c;
I(L_idx, t+1) = I_l;
end
其中,I_sc即是
I
u
′
\boldsymbol I'_{\rm u}
Iu′,电压源和电容的电流向量;
完成最后一次求解后,不再需要计算下一时刻电容或电感的值,使用if实现。
拓展
- 含受控源的电路应该可以用此方法计算
- 对于电路拓扑结构统一的电路(如,分布参数电路),可以快速灵活改变 电路结构 信息,分析拓扑结构相同而节点、支路数量不同对电路的影响
- 加入更多电器元件的数学模型,如二极管、三极管、放大器、数字器件等等














 3469
3469











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









