






 文章介绍了TMS320F28335主控的EtherCAT伺服方案,结合TIDSP和FPGA技术,提供源码和PDF图纸,旨在解决工业自动化中的高速、高精度运动控制问题。
文章介绍了TMS320F28335主控的EtherCAT伺服方案,结合TIDSP和FPGA技术,提供源码和PDF图纸,旨在解决工业自动化中的高速、高精度运动控制问题。
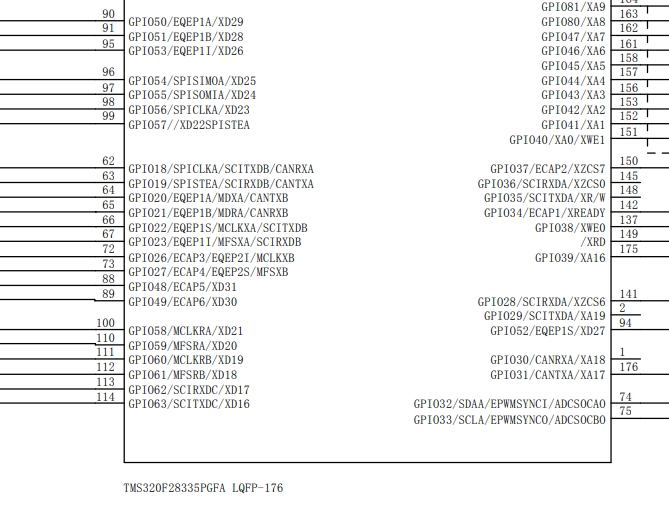
TMS320F28335主控 EtherCAT伺服方案
EtherCAT低压伺服,提供TI DSP和FPGA源码和PDF原理图。
ID:52100680262519343
左手指月
TMS320F28335主控EtherCAT伺服方案是一种基于EtherCAT协议的低压伺服解决方案。该方案结合了TI DSP和FPGA的技术,在实现高性能的同时,提供了源码和PDF原理图的支持。
在工业自动化领域,伺服系统是一种广泛应用的控制系统,用于精确控制运动过程。然而,传统的伺服系统存在着不少挑战,比如通信速度慢、实时性差等问题。针对这些问题,EtherCAT协议应运而生。
EtherCAT是一种基于以太网技术的实时通信协议,其独特的分布式时钟同步机制和高效的数据传输方式,使得它在工业自动化领域具有广泛的应用前景。借助EtherCAT协议,TMS320F28335主控EtherCAT伺服方案能够实现高速、高精度的运动控制。
TMS320F28335主控芯片是德州仪器(TI)推出的一款高性能数字信号处理器(DSP)芯片,具备强大的计算能力和丰富的外设接口。结合FPGA技术,可以进一步提升系统的性能和灵活性。该方案提供了TI DSP和FPGA的源码,用户可以根据自身需求进行定制化开发。此外,还提供了PDF格式的原理图,方便用户了解系统的硬件设计。
通过TMS320F28335主控EtherCAT伺服方案,用户可以实现复杂的运动控制任务。例如,可以实现工业机器人的精确定位、机械臂的高速运动等。同时,该方案还具有高度的可扩展性和兼容性,可以与各种不同的设备和系统进行集成。
总之,TMS320F28335主控EtherCAT伺服方案是一种高性能、高可靠性的运动控制解决方案。它利用EtherCAT协议实现了高速、高精度的通信,并结合了TI DSP和FPGA的技术,提供了源码和PDF原理图的支持。通过该方案,用户可以实现复杂的运动控制任务,满足工业自动化领域的需求。
【相关代码 程序地址】: http://nodep.cn/680262519343.html















 5822
5822

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









