






基于simulink的悬架仿真模型,有主动悬架被动悬架天棚控制半主动悬架
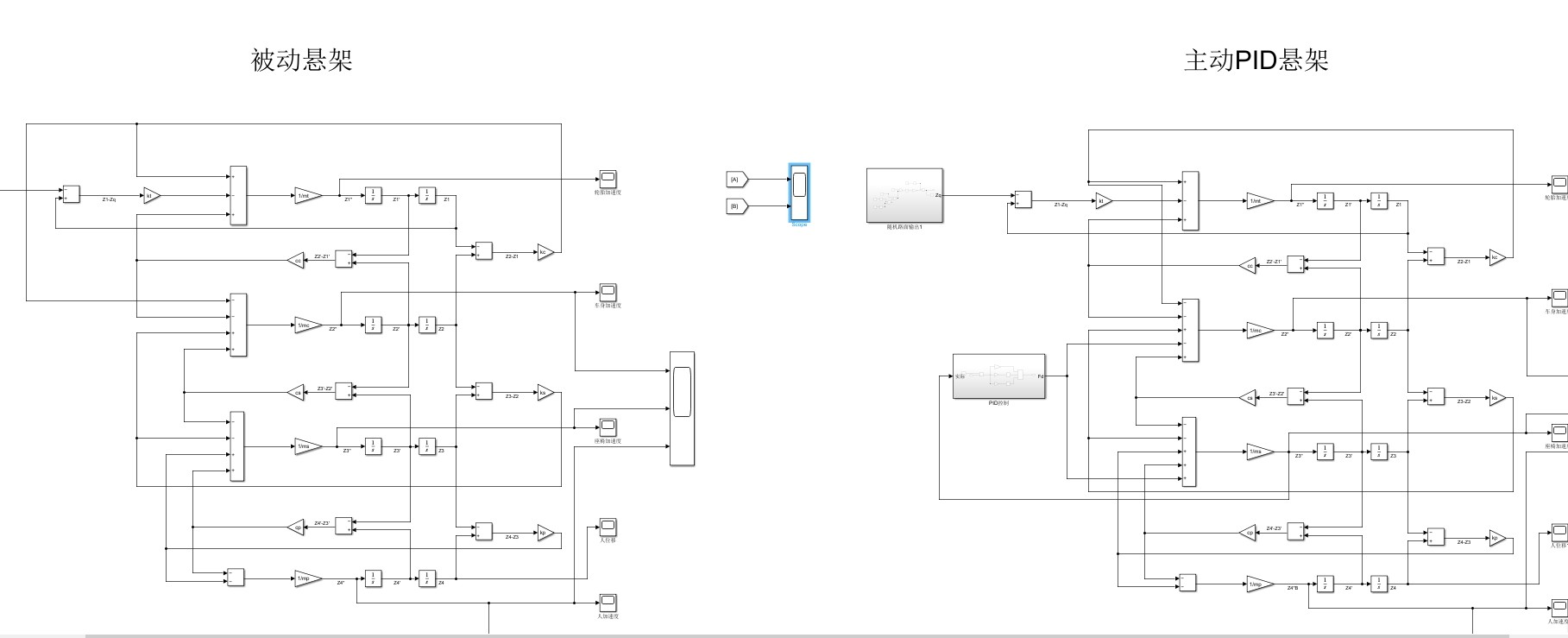
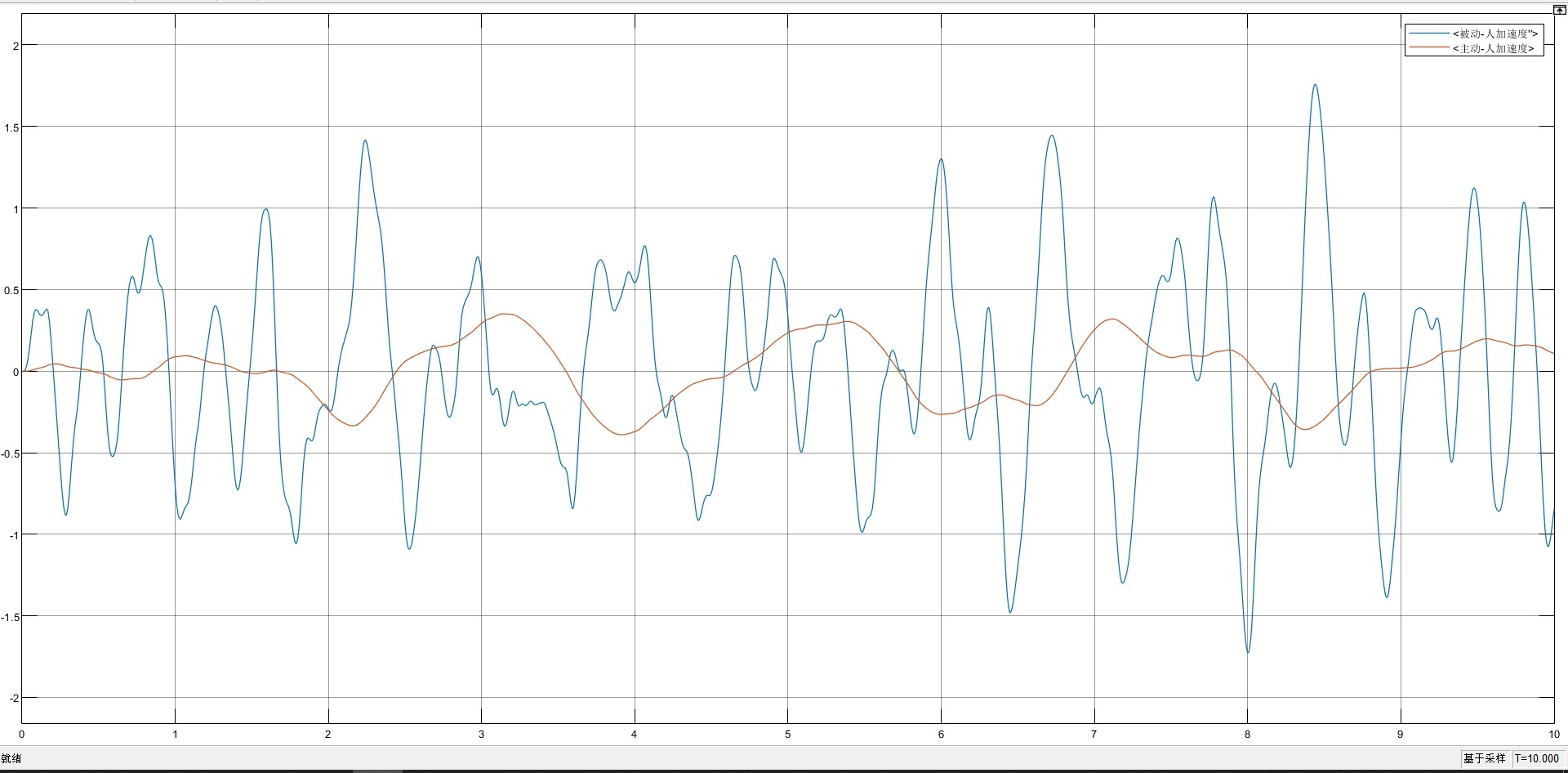
[1]基于pid控制的四自由度主被动悬架仿真模型
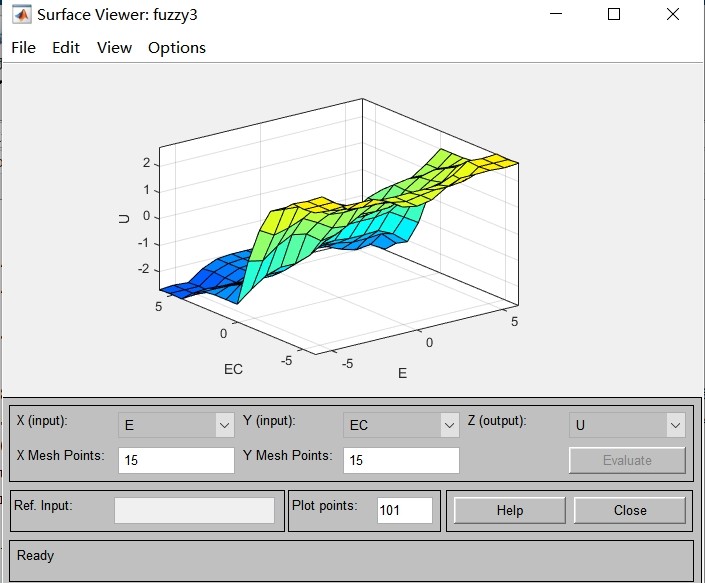
[2]基于模糊控制的二自由度仿真模型,对比pid控制对比被动控制,的比较说明
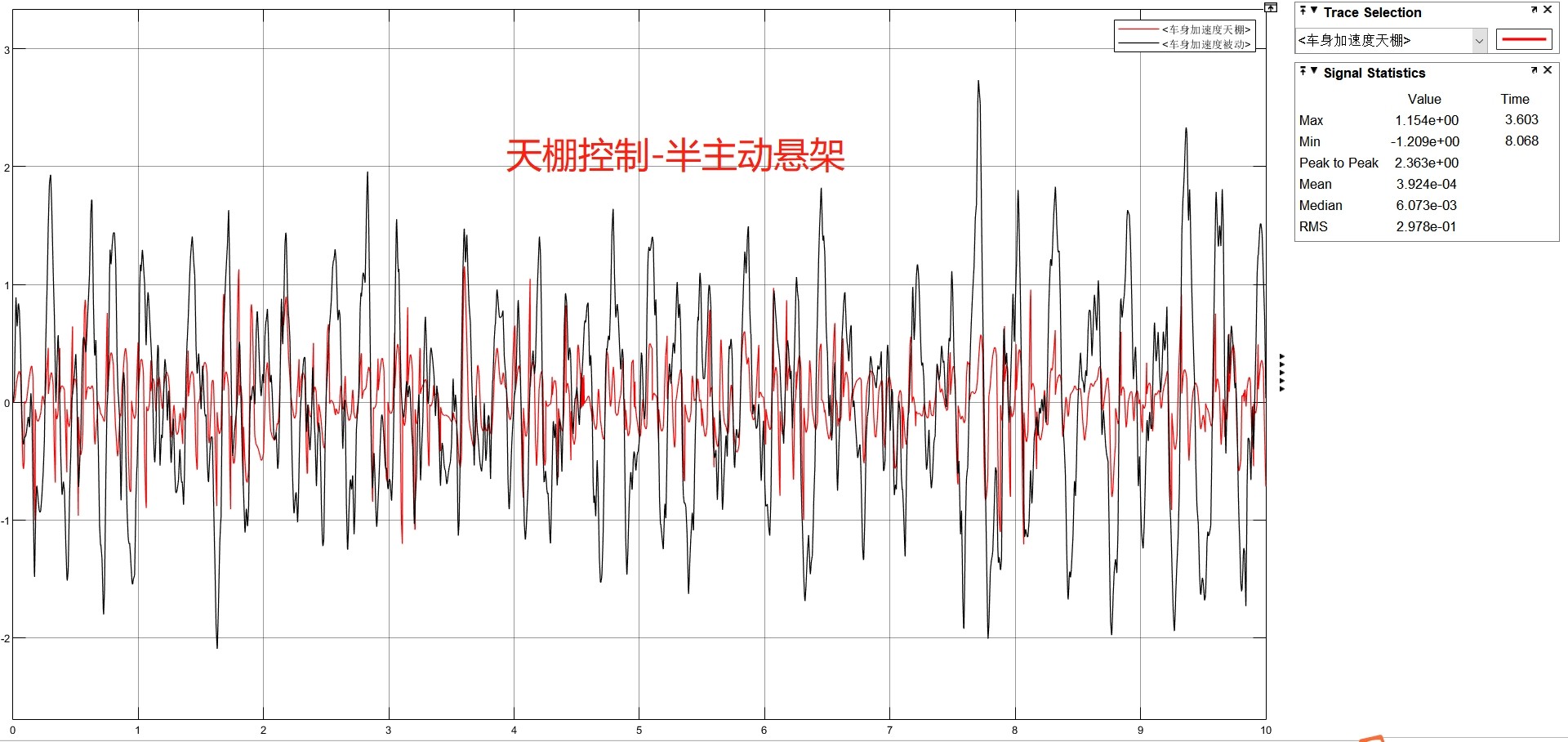
[3]基于天棚控制的二自由度悬架仿真
以上模型,说明文档齐全,仿真效果明显
YID:16149695612115380
先实时蒋解再支付
基于Simulink的悬架仿真模型是汽车工程中一项重要的研究内容。悬架系统作为车辆的重要组成部分,直接影响着车辆的驾驶舒适性和操控性能。因此,设计和优化悬架系统的控制策略是提高汽车行驶性能的关键一环。
在悬架仿真模型中,主动悬架和被动悬架是常见的两种控制方式。主动悬架系统通过悬架执行器主动调节悬架系统的特性,以适应不同路况和驾驶条件,提高车辆的悬架性能。而被动悬架系统则是根据悬架系统的机械特性和减震器的阻尼特性来实现悬架的控制,无法主动调节。
天棚控制是一种应用于主动悬架系统的控制策略,其原理是通过车辆的传感器获取路面信息,并通过控制算法对悬架进行实时调节,以减少车辆的振动和颠簸感,提高乘坐舒适性。天棚控制可以根据实际路况和驾驶需求智能调节悬架的硬度和减震效果,使车辆保持平稳的行驶状态。
在悬架控制中,PID控制和模糊控制是常用的两种控制算法。PID(比例-积分-微分)控制是一种经典的控制方法,通过对系统误差的比例、积分和微分进行调节来实现对系统的控制。而模糊控制则是一种基于模糊逻辑的控制方法,通过建立一组模糊规则来对系统进行控制。与PID控制相比,模糊控制具有对非线性系统和模糊信息的适应能力较强的特点。
基于PID控制的四自由度主被动悬架仿真模型是一种综合运用PID控制算法实现悬架系统控制的模型。该模型考虑了四个自由度(垂直加速度、车身俯仰角、车轮转角和悬架位移)的变化,通过PID控制器对悬架系统进行控制,以实现对车辆行驶平顺性和操控性能的提升。
与PID控制相比,基于模糊控制的二自由度仿真模型在悬架控制中采用了模糊控制算法。该模型将模糊控制器应用于悬架系统的控制中,并与PID控制进行对比,以评估模糊控制算法在悬架系统控制中的
【相关代码,程序地址】:http://fansik.cn/695612115380.html
















 596
596











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









