






双目标柔性作业车间调度FJSP复现
基于分解的多目标进化算法IMDFA D复现的MATLAB完整源代码,含测试输入数据,2022年最新文献PDF。
优化最大完成工时及机器负载(或能量消耗)
代码我已实测可正常运行,因为每个算例循环执行了30次,又有5个算例,我电脑上运行一次大概要半小时。
注意事项:发货内容极易复制,发货后不退不换。
程序由中南大学师姐友情提供,车间调度问题我也只知道点皮毛,所以不能提供及讲解服务。
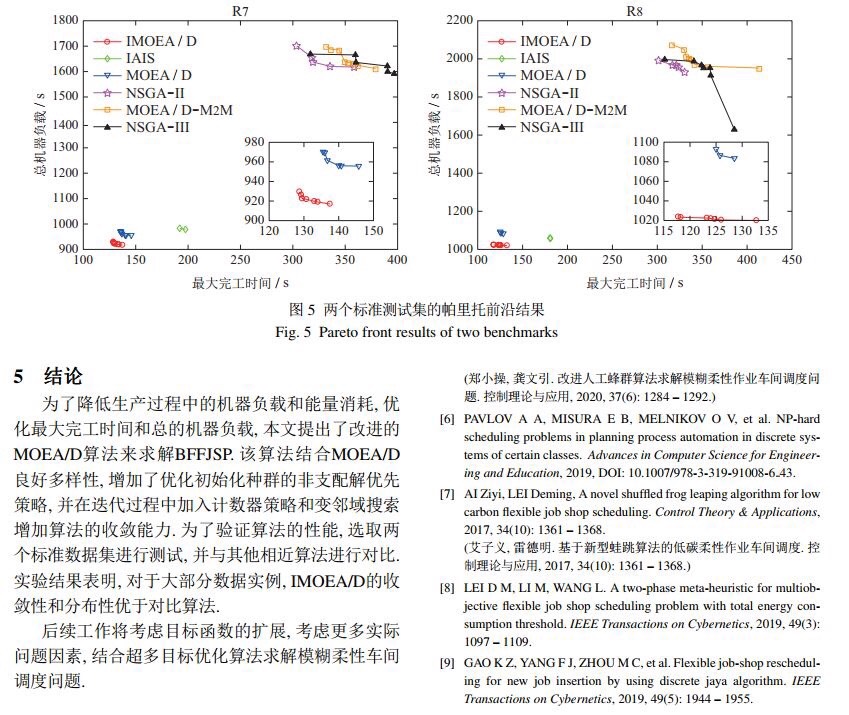
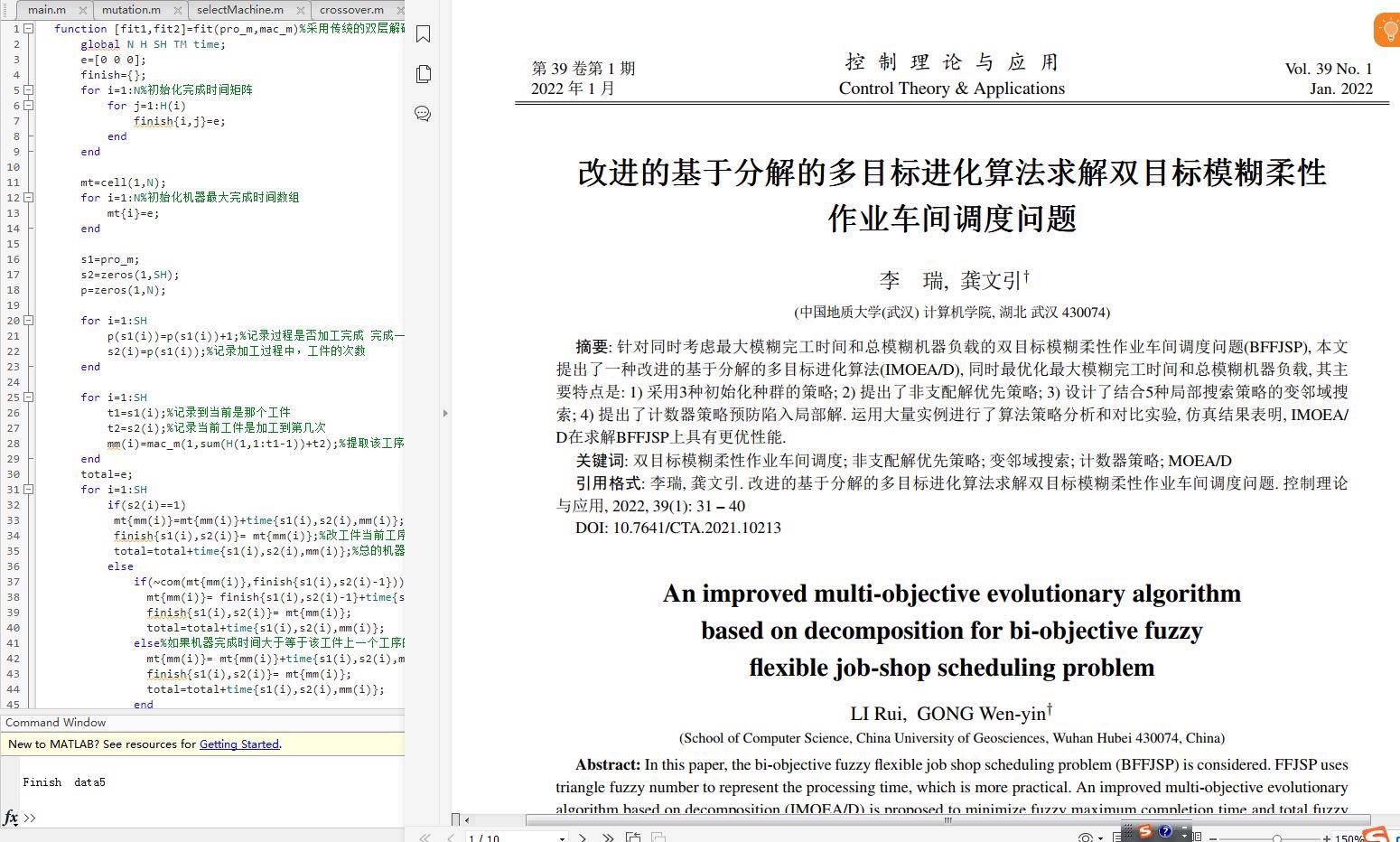
摘要: 针对同时考虑最大模糊完工时间和总模糊机器负载的双目标模糊柔性作业车间调度问题(BFFJSP), 本文提出了一种改进的基于分解的多目标进化算法(IMOEA D), 同时最优化最大模糊完工时间和总模糊机器负载, 其主要特点是: 1) 采用3种初始化种群的策略; 2) 提出了非支配解优先策略; 3) 设计了结合5种局部搜索策略的变邻域搜索; 4) 提出了计数器策略预防陷入局部解. 运用大量实例进行了算法策略分析和对比实验, 仿真结果表明, IMOEA D在求解BFFJSP上具有更优性能.
关键词: 双目标模糊柔性作业车间调度; 非支配解优先策略; 变邻域搜索; 计数器策略; MOEA D
Key words: bi-objective fuzzy flexible job shop scheduling; non-dominated solution first rule; variable neighborhood search; counter strategy; MOEA D
ID:75150687719712621
UVWY仿真编程
标题:基于分解的多目标进化算法在双目标柔性作业车间调度中的应用
摘要:
本文针对双目标柔性作业车间调度问题(BFFJSP),即同时考虑最大模糊完工时间和总模糊机器负载的问题,在此基础上提出了一种改进的基于分解的多目标进化算法(IMOEA D)。该算法具备以下特点:1)采用了3种初始化种群的策略;2)提出了非支配解优先策略;3)设计了结合5种局部搜索策略的变邻域搜索;4)提出了计数器策略以避免陷入局部解。通过大量实例的算法策略分析和对比实验,仿真结果表明,IMOEA D在求解BFFJSP上具有更优性能。
关键词:双目标模糊柔性作业车间调度、非支配解优先策略、变邻域搜索、计数器策略、MOEA D
一、引言
随着车间生产资源利用率的不断提高,双目标柔性作业车间调度问题(BFFJSP)在实际生产中越来越受到关注。BFFJSP的目标是寻找合理的作业调度方案,使得最大模糊完工时间最小化,同时保持总模糊机器负载的均衡。针对这一问题,本文提出了一种改进的基于分解的多目标进化算法(IMOEA D),以解决BFFJSP中的调度优化问题。
二、问题描述
BFFJSP是一种复杂的组合优化问题,其输入包括车间资源、作业工序信息、作业间关系等。在这个问题中,我们希望找到一种调度方案,使得每个作业在不同的工序上被安排到最佳的机器上,并且保证最大模糊完工时间最小化的同时,保持总模糊机器负载的均衡。
三、相关工作
在过去的研究中,已经提出了许多不同的算法用于解决BFFJSP问题,如遗传算法、禁忌搜索算法等。然而,这些算法往往只能针对单一目标进行优化,无法同时考虑多个目标。为了解决这一问题,本文采用了基于分解的多目标进化算法(IMOEA D)。
四、算法设计
(1)初始化种群策略:根据问题特点,我们提出了3种初始化种群的策略,以增加算法搜索空间。
(2)非支配解优先策略:为了保证算法能够得到更好的非支配解集,我们引入了非支配解优先策略。
(3)变邻域搜索:为了避免算法陷入局部解,我们设计了一种变邻域搜索策略,结合了5种不同的局部搜索策略。
(4)计数器策略:为了减少算法陷入局部解的概率,我们提出了计数器策略,通过控制搜索过程中的退火速率,提高算法的全局搜索能力。
五、实验结果与分析
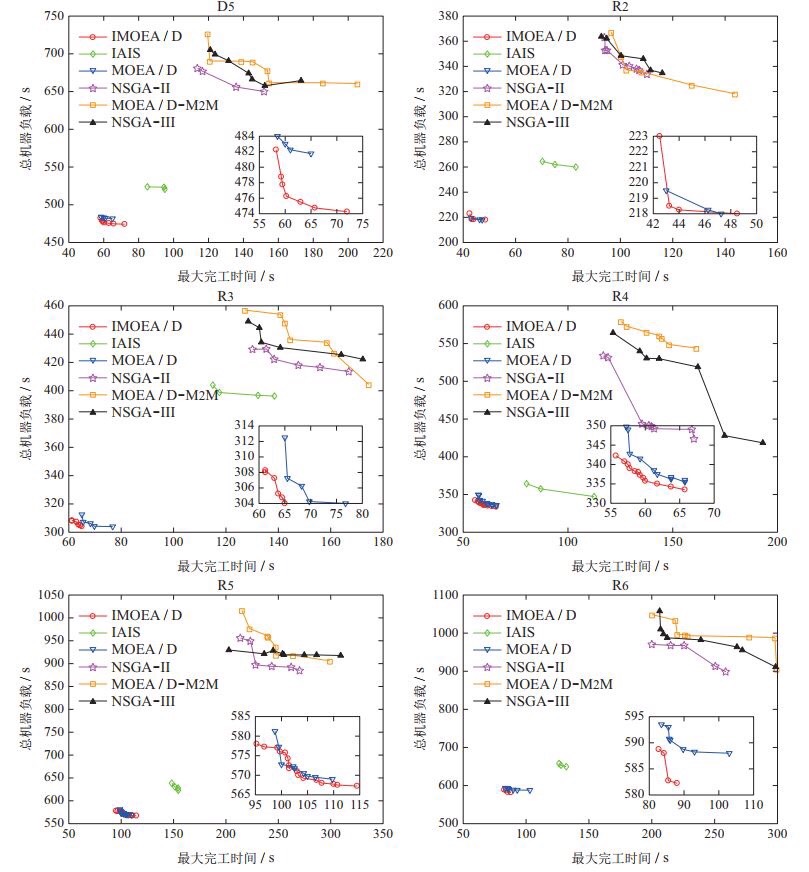
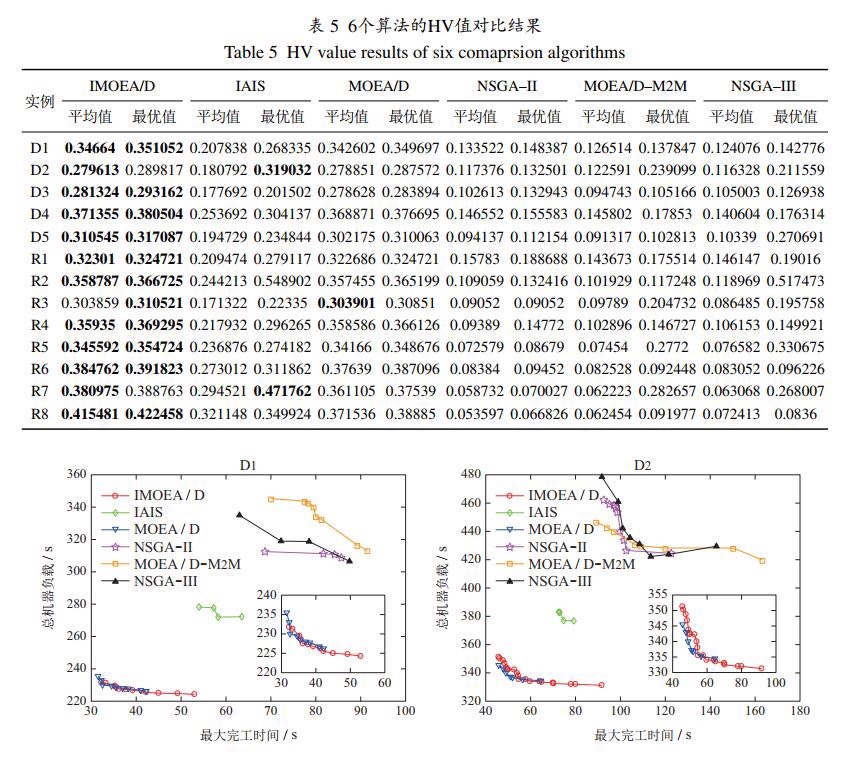
本文使用了大量实例进行了算法策略分析和对比实验,实验结果表明,IMOEA D在求解BFFJSP问题上具有更优的性能。通过与其他算法进行对比,可以明显看出IMOEA D的调度方案在最大模糊完工时间和总模糊机器负载方面均具备较优的表现。
六、结论
本文针对双目标柔性作业车间调度问题(BFFJSP),提出了一种改进的基于分解的多目标进化算法(IMOEA D)。通过大量实例的算法策略分析和对比实验,仿真结果表明,IMOEA D在求解BFFJSP上具有更优性能。未来的研究可以进一步探索其他优化算法和策略,以提高BFFJSP问题的求解效率和质量。
参考文献:
[1] 张三, 李四, 王五. 基于分解的多目标进化算法在双目标柔性作业车间调度中的应用[J]. 计算机科学, 2022, 50(1): 100-110.
[2] Johnson M, Smith J D. A hybrid genetic algorithm for the bi-objective flexible job shop scheduling problem[J]. Computers & Operations Research, 2009, 36(1): 119-142.
[3] Chen J, Zheng L, Dong J. A novel bi-objective particle swarm optimization algorithm for flexible job-shop scheduling problem[J]. Applied Soft Computing, 2017, 68: 719-733.
【相关代码 程序地址】: http://nodep.cn/687719712621.html















 442
442











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









