







【深度学习初探】Day31 - 三维点云数据的获取
文章目录
在进行三维点云图像研究时,我们首先要获得三维点云的数据集,而如何获取成了一个难题。点云数据是一团“点”组成的数据集,这些“点”包含了丰富的信息,包括三维坐标(在当前坐标系下的)X,Y,Z,颜色、分类值、强度值、时间等等。那么如何准确获得这些点的信息,经过多年的研究,我们总结出了如下几种方案。
一、激光扫描仪(LiDAR)
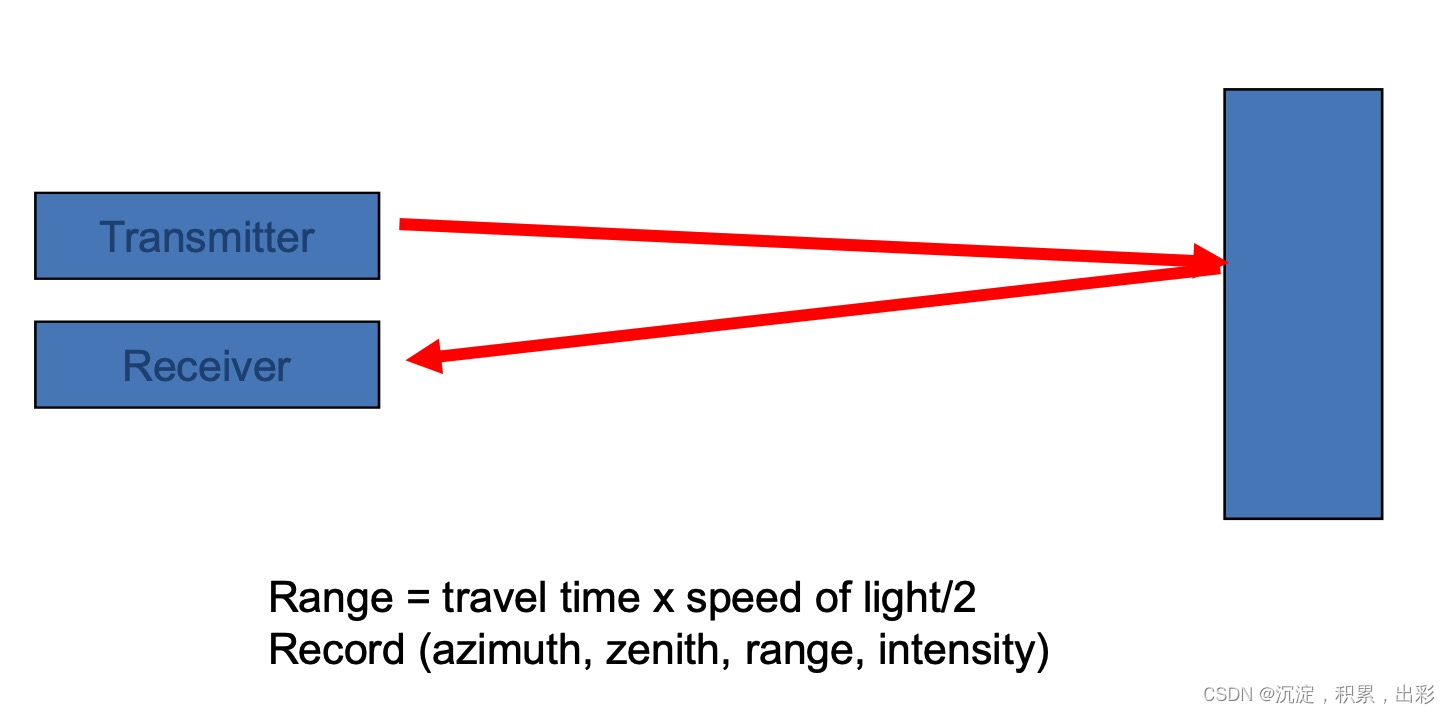
激光三维扫描仪利用激光测距的原理,通过记录被测物体表面大量的密集的点在三维坐标、反射率和纹理等信息,能快速复建出被测目标的三维模型及线、面、体等各种图件数据。原理图:
一般利用激光扫描的方式主要用于逆向工程,负责曲面抄数,工件三维测量等,针对没有技术文档的三维实物、样品或模型,快速测出物体的轮廓集合数据,加以构建,生成通用输出格式的曲面数字化模型。
它的特点是成本相对较高,但是生成的点云质量高。
二、深度相机(Depth Camra)
通过红外激光器把具有结构特征的光线投影到物体上,通过红外摄像头采集得到深度信息,如微软的Kinect,Kinect 2。
传统的RGB彩色普通相机称为2D相机,只能拍摄视角内的物体而没有物体到相机的距离信息。但 RGB-D 深度相机(又称为3D相机,RGB-D 的D代表 Dpeth,深度信息)可以获取物体到相机的距离信息,加上2D平面的X,Y坐标,可以计算出每个点的三维坐标,这个三维坐标可以被应用于三维重建、目标定位、识别等领域。
它的特点是计算量小、夜晚也可用、成本较低。
三、双目相机(Stereo Camera)
双目相机使用的是普通相机而非 RGB-D 相机,它是使用两个相机从不同位置获取物体的两幅图像,通过计算对应点的位置偏差,使用三角原理(Triangulation)计算点的三维坐标。
它的特点是成本低、室内室外都适用、对环境光敏感。
双目立体相机的成像原理如图所示:
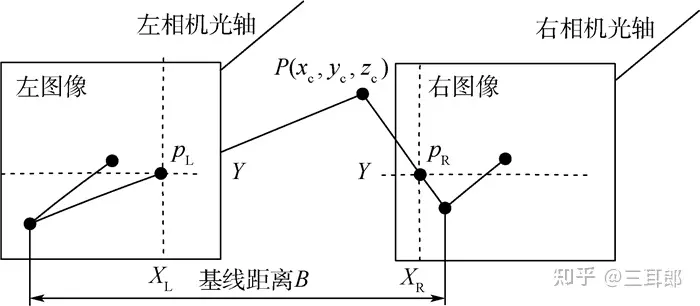
通过左右两个摄像头获取图像,计算视差,模拟出人的双眼,然后通过一些计算将现实中的目标(世界坐标系)转换到二维图像坐标系上(像素坐标系和图像坐标系),而这之间的转换依靠相机坐标系。
四、运动恢复结构(Structure from Motion)
SfM 是一种三维重建算法,可以通过两个或多个场景(图片)恢复相机位姿,并重建三维坐标点。只需给出多幅图像及其图像特征点的对应集合,就可以估计3D点的位置和摄像机姿态(运动)。
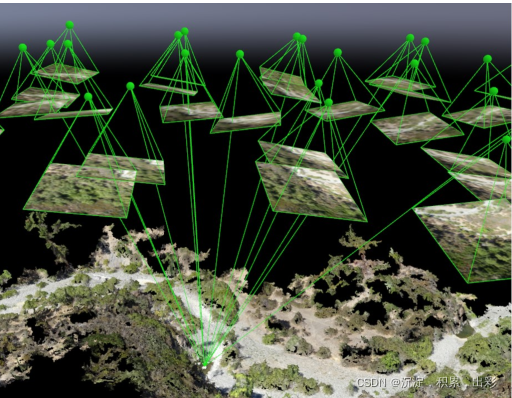
这种方法的特点是成本低,但是计算量很大。
总结
以上是四个常用的点云获取方法,其中,通过 LiDAR 激光探测与测量是比较好的获取点云的方法,这样获得的点云更加拟真。
根据激光测量原理得到的点云,包括三维坐标(XYZ)和激光反射强度(Intensity),强度信息和目标表面的材质、粗糙度、入射角方向以及仪器的发射能量、激光波长有关。
根据相机摄影测量原理得到的点云,包括三维坐标(XYZ)和颜色信息(RGB)。
根据获取点云数据的方式不同,后续处理点云的基础信息也不同。

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









