






QT步进电机上位机控制程序源代码跨平台 支持串口/TCP/UDP三种通信类型
ID:1820646716242002
工业上位机软件开发
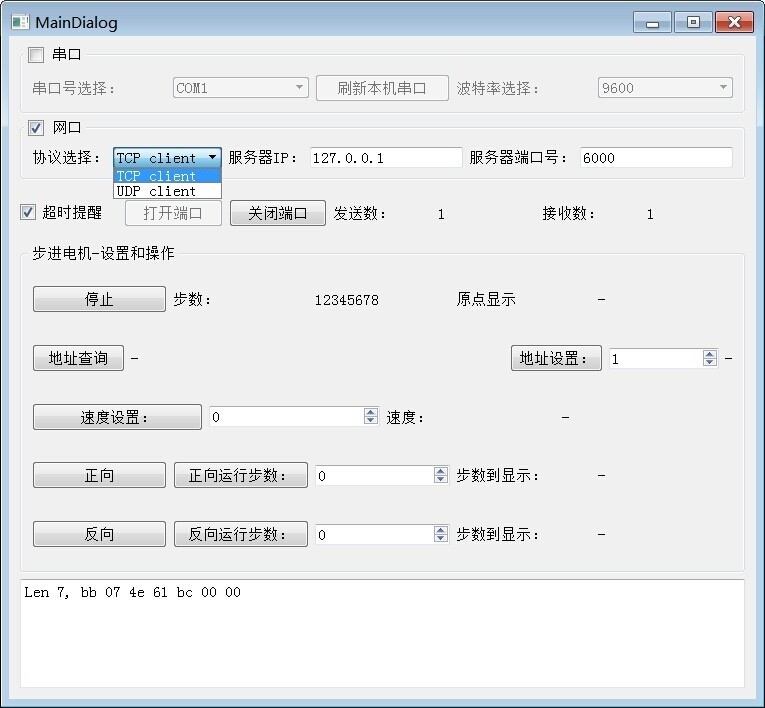
本文将围绕QT步进电机上位机控制程序源代码的编写展开讨论。该代码实现了跨平台功能,支持串口、TCP和UDP三种通信类型。
在当今科技发展迅速的时代,步进电机已经成为许多自动化系统中不可或缺的部分。为了更好地管理和控制步进电机,在程序员的努力下,QT步进电机上位机控制程序源代码应运而生。这个程序代码的设计目的是为了能够在不同的操作系统上运行,并且可以通过串口、TCP和UDP这三种通信类型进行数据的传输和控制。
首先,我们来介绍一下为什么选择QT作为开发平台。QT是一个跨平台的应用程序开发框架,具有良好的可移植性和兼容性。它可以在Windows、Linux、macOS等多个操作系统上运行,并且提供了丰富的GUI组件和函数库,可以方便地实现用户界面的设计和开发。而且,QT还提供了强大的网络编程和串口通信功能,使得我们可以轻松地实现步进电机的控制和交互。
在编写QT步进电机上位机控制程序源代码时,我们需要考虑到跨平台的要求。为了实现这个目标,我们需要使用QT提供的跨平台API和类库,这样我们的代码就可以在不同的操作系统上编译和运行。在程序的入口函数中,我们需要初始化QT应用程序对象,并设置相应的窗口属性和样式。然后,我们可以创建一个主窗口,并在其中添加各种控件和组件,以实现用户界面的设计。在主窗口中,我们可以添加按钮、滑动条、文本框等控件,以便用户可以对步进电机进行控制和调节。
为了实现串口通信功能,我们需要使用QT提供的串口类库。在代码中,我们可以指定串口的名称、波特率、数据位、停止位和校验位等参数,并且可以通过读写操作来发送和接收数据。对于TCP和UDP通信,我们可以使用QT的网络编程类库来实现。我们可以指定服务器的IP地址和端口号,然后通过连接操作来建立与服务器的连接。一旦连接建立成功,我们就可以发送和接收数据,实现步进电机的控制和数据交互。
在编写QT步进电机上位机控制程序源代码时,我们需要注意一些常见的问题。首先,我们需要进行错误处理和异常处理,以确保程序的稳定性和可靠性。如果发生错误或异常,我们可以通过显示错误消息或记录错误日志来进行提示和调试。其次,我们需要考虑到用户界面的友好性和易用性。我们可以使用QT的样式表和动画效果来美化界面,以吸引用户的注意力。此外,我们还可以添加一些实用的功能,比如保存配置文件、导入导出数据等,以提高用户的使用体验。
总而言之,QT步进电机上位机控制程序源代码的编写是一个复杂而又有挑战性的任务。通过合理选择编程平台和技术手段,我们可以实现跨平台功能,并支持串口、TCP和UDP三种通信类型。这将为步进电机的管理和控制提供更便捷和高效的解决方案。希望本文对您了解QT步进电机上位机控制程序源代码的编写有所帮助,谢谢阅读。
以上相关代码,程序地址:http://matup.cn/646716242002.html















 473
473

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









