








@article{2020BRPtwostageSPM,
author = {Tang, Qiong and Fu, Zhuo and Zhang, Dezhi and Guo, Hao and Li, Minyi and Zhen, Lu},
title = {Addressing the Bike Repositioning Problem in Bike Sharing System: A Two-Stage Stochastic Programming Model},
year = {2020},
issue_date = {2020},
publisher = {Hindawi Limited},
address = {London, GBR},
volume = {2020},
issn = {1058-9244},
url = {https://doi.org/10.1155/2020/8868892},
doi = {10.1155/2020/8868892},
journal = {Sci. Program.},
month = {jan},
numpages = {12}
}
摘要
在本文中,研究了具有随机需求的自行车重新定位问题。该问题被制定为两阶段随机规划模型 two-stage stochastic programming model,以优化随机需求下每个站点和仓库的重新定位卡车的路线和装卸决策。该模型的目标是最小化运输成本的预期总和 the expected total sum of the transportation costs、所有站点的预期罚款成本the expected penalty costs at all stations和仓库的持有(租赁)成本the holding cost of the depot.。开发了一种模拟退火算法simulated annealing algorithm来求解该模型。对 20 到 90 个站点的一组实例进行了数值实验,以证明求解算法的有效性和所提出的两阶段随机模型的准确性。
1. introduce
自行车共享系统(BSS)作为一种可持续、无碳的交通方式,可以有效解决城市公共交通“第一公里和最后一公里”的问题。近年来,BSS 越来越受欢迎,因为它不仅可以减少城市污染排放和交通拥堵,而且被认为是改善用户健康的有效途径 [ 1]. 一个BSS由一个depot和几个stations组成,分布在城市的不同街道。BSS 的成功取决于自行车的可用性。由于用户的租用自行车,系统中的一些站点经常会出现不平衡的情况,即这些站点要么有多余的,要么没有足够的自行车。换句话说,要么当一个站点有多余的自行车时,它们会因为没有用户需要而被浪费,或者在一些没有足够自行车的站点,无法满足用户的需求。为确保系统内所有站点的自行车可用性,BSS 需要使用再分配卡车将自行车从站点转移到站点,以根据每个站点的需求平衡自行车的数量。这个问题通常被定义为 BSS 中的自行车重新定位问题bike repositioning problem (BRP)。BRP 的主要目标是平衡跨站自行车的供需,以提高用户满意度,同时尽可能降低再分配卡车的运输成本。根据 Berbeglia 等人的分类。[2 ],自行车重新定位问题本质上是一个多对多的接送问题,Benchimol 等人首先证明它是一个 NP-hard 问题。[ 3 ]。
通常,现有工作假设 BSS 中每个站的再分配需求是确定性输入参数 [ 4 – 21 ]。也就是说,这些模型严重依赖于预先给定每个站点的再分配卡车的装卸量。然而,这种强有力的假设在城市公共交通需求通常包含不确定性和随机性的现实世界条件下通常无法成立 [ 22 ]。正如 Fricker 和 Gast 所指出的 [ 23],在研究 BSS 的性能时,不应忽视用户需求不确定性的影响。作者还证明,结合未来需求的知识可以导致在重新定位时做出更准确和稳健的决策。
在 BRP 中可能没有受到足够重视的另一个挑战是对仓库持有成本的考虑。在 BRP 中,需要将自行车从自行车剩余站点转移到另一个自行车不足站点,以实现 BSS 中所有自行车站点的供需平衡,以满足用户的需求。这种重新定位操作后供需的完美平衡必须首先确保 BSS 中的内部平衡,即自行车过剩站点的自行车数量应等于自行车不足站点的自行车数量。在实际运营过程中,有些自行车在投入使用后可能会丢失或损坏。这种情况经常发生,很可能会导致 BSS 内在的供需失衡。对于无法在 BSS 站点之间进行平衡的自行车,它们要么从仓库取走,要么运回仓库,代价是增加了仓库的持有成本。一些 BRP 模型简单地假设仓库的容量是足够的。这样,可以从车辆段提取一些自行车来满足自行车短缺站点的需求,和/或可以将一些自行车剩余站点的自行车带回车辆段,以实现供需 BSS 中的所有电台之间的完美平衡 [4 – 7 ]。不幸的是,这些现有的工作还没有考虑 BRP 模型中depot的持有成本。
随机规划是一种设计具有随机需求的数学规划模型的技术,它可以帮助决策者在需求随机性的影响不容忽视的情况下做出更准确的决策。虽然随机规划获得的优化结果不能满足所有未来场景,但它们有助于在处理随机需求方面取得优于平均水平的性能。
为了解决上述问题,在本文中,我们通过使用随机规划捕获和建模系统内再分配需求的不确定性来考虑 BRP 的随机性。特别是,我们针对具有随机需求的自行车重新定位问题bike repositioning problem with stochastic demand (BRPSD) 提出了一个两阶段随机规划模型。在第一阶段,我们确定路由决策,其中必须在知道再分配需求的实现之前做出“此时此地”的决策。然后,进入第二阶段,我们进一步确定每个站点和场站的装卸决策,其中考虑到未来的不确定性做出“观望”决策。
在本文中,随机再分配需求由一组离散场景建模,并为每个场景给出预定义的发生概率。本文的主要贡献总结如下:
(1) 介绍了针对具有随机需求的自行车重新定位问题 (BRPSD) 的一般基于场景的两阶段随机规划模型。在仓库允许装卸活动的情况下,所提出的模型考虑了仓库的库存持有成本。
(2) 提出了一种有效的元启发式算法,即模拟退火算法来求解定义的 BRPSD。
(3) 通过数值实验进一步讨论了在 BRPSD 中将再分配需求视为随机需求的必要性。
本文的其余部分安排如下。我们在第2节中回顾了相关文献,并在第3节中描述了该问题的数学公式。在第4节中,我们提出了改进的模拟退火算法来求解模型。然后,我们在第5节介绍实验结果,并在第6节讨论潜在的未来研究来总结本文。
2. Literature Review 文献综述
据我们所知,Benchimol 等人。首先正式化并解决 [ 3 ]中的 BRP 。从那时起,在过去的几十年里,针对 BRP 的各种模型和求解算法得到了讨论。
我们简要回顾了与本文相关的研究,包括启发式和元启发式heuristic and metaheuristic求解方法,用于求解确定性 BRP 和具有随机需求的 BRP 模型。
2.1. Heuristic Solution Algorithm for the Deterministic BRP 确定性 BRP 的启发式求解算法
根据 Pal 和 Zhang [ 8 ] 的说法,根据需要执行的重新定位的严格程度,BRP 可以分为完全重新定位问题和部分重新定位问题。在前一个问题中,实现站间完美平衡的约束被认为是硬约束,而在后一个问题中,它是一个软约束。
在完全重定位问题中,重定位操作后必须满足每个工位的最优库存。Cruz 等人首先应用了迭代局部搜索算法。[ 9 ] 解决单车 BRP,然后被 Bulhões 等人使用。[ 10 ] 解决BRP的多车辆版本。后来,Pal 和 Zhang [ 8 ] 在自由浮动自行车共享系统中对静态 BRP 进行建模,并提出了一种混合嵌套大邻域搜索和可变邻域下降算法来解决 BRP。Dell’Amico 等人。[ 11] 开发了一种破坏和修复元启发式算法,该算法利用有效的构造启发式和几个局部搜索程序一起解决 BRP。总的来说,完整的重新定位问题的目标主要是通过确定路径决策来追求最小的运输成本。在现实世界的系统中有效地应用这些方法一直是一个挑战,因为这些模型中还忽略了其他同样重要的标准。
在部分重定位问题中,重定位操作后不一定能达到每个工位的理想库存。尽管如此,这些问题的目标不仅是通过确定路线决策来追求最小的运输成本,而且还通过确定每个站点的装卸决策来最大程度地减少用户的不满。在文献中,Forma 等人提出了一种用于多车辆 BRP 的三步数学启发式算法。[ 6 ]。在他们的方法中,站点首先通过保存启发式进行聚类。然后,构建通过集群的路线。最后,确定通过每个集群中的站点的路由顺序和通过集群的顺序。最后两个步骤被制定为 CPLEX 求解的混合整数线性模型。你 [12 ] 为多车辆 BRP 提出了一种两阶段启发式方法,该方法基于对规划的最低服务要求。在他提出的模型中,每个阶段代表一个决策过程。在第一阶段,每个时隙的所有站点的加载和卸载决策由线性规划模型制定。然后,在第二阶段,通过两个参数敏感的数学模型,通过迭代方法制定路由决策。
除了阶段启发式算法外,还提出了许多启发式和元启发式求解方法来解决确定性 BRP,仅举几例,禁忌搜索 [5、13]、遗传算法[ 14 ] 、化学反应优化算法[ 15、16 ] ]、人工蜂群算法[ 17 ]、约束规划[ 18、19 ]、变邻域搜索[ 20 ]、迭代局部搜索[ 21 ]、大邻域搜索算法[ 7]],等等。尽管如此,这些现有方法的实际应用仍然很困难,并且经常会带来意想不到的结果。这是因为现实世界的 BRP 中普遍存在用户需求的不确定性;然而,它还没有被这种确定性模型所捕获。
2.2. The BRP with Stochastic Demands 具有随机需求的 BRP
据我们所知,有限的文献考虑了 BRP 中的随机需求。具有资源模型的两阶段随机规划已成功用于解决自行车重新定位问题,因为它们允许建模者通过第一阶段和第二阶段决策变量一起表示路线计划和装卸活动。Dell’Amico 等人。[ 24] 似乎是针对自行车重新定位问题提出基于场景的两阶段随机模型的先驱论文,将站点的重新分配需求视为随机变量。作者提供了五个精确程序以及一种启发式算法,该算法将基于相关性的构造程序与 VND 局部搜索方法相结合来解决他们的 BRPSD。启发式算法在评估局部搜索移动时仅考虑运输成本,并且仅接受可行解决方案,其中通过有效策略检查局部搜索移动的可行性。
但是,BRPSD 在以下三个方面与我们的问题不同。
首先,该模型的目标是最小化卡车的预期总行驶距离和所有站点的惩罚成本,而我们的问题是最小化卡车的预期总行驶距离、所有站点的惩罚成本和处理成本在仓库。
其次,在我们的问题中,我们不仅使用运输成本还使用预期总成本来衡量本地搜索移动。
第三,我们开发了一种方法来快速确定任何给定路线下所有站点和仓库的可行装卸量。因此,不必在局部搜索中检查解的可行性。
最近还有一些研究随机 BRP 变体的研究,其中随机需求由起点-终点 origin-destination (OD) 对定义,而不是站点的重新分配。例如,Maggioni 等人。[ 25 ] 提出两阶段随机规划模型来分别确定分配给每个站点的最佳自行车数量和从一个站点转运到另一个站点的最佳自行车数目。他们使用 AMPL 和 CPLEX 来求解模型。严等。[ 26 ] 应用时空网络模型来确定自行车站、自行车车队分配和自行车路线的最佳位置。他们的解决方案算法基于基于阈值接受的启发式算法。
从上述文献回顾可以看出,当前学者提出了丰富的启发式算法来求解确定性BRP。尽管如此,据我们所知,还没有有效地采用元启发式算法来解决具有随机需求的 BRP 的工作。本文的研究填补了这一理论空白。
3. 数学公式
本文研究的自行车共享系统包括一个depot和一组站点。每个站点对每个场景都有一个再分配需求,表示当前库存水平和每个场景的最优库存水平之间的差异。对于某个场景,如果某个站点的再分配需求为正,则该站点定义为pick up站点;如果站点的再分配需求为负,则该站点被定义为delivery station站,应由取货站提供自行车;如果一个站的再分配需求等于 0,则该站称为平衡站。还必须访问平衡站 Balanced stations。
我们认为 BSS 中只有一辆具有给定容量的卡车可用。卡车从取货站收集自行车并将它们运送到送货站。有些自行车可以从停车场取走或送回,每个站点只允许参观一次。此外,类似于 Liu 等人。[ 16 ],假设自行车停在 BSS 的任何地方;因此,站容量限制被移除。
各场景各站点、场站的装卸量根据对应的需求场景独立决策。然而,卡车的路线决策必须考虑所有可能的需求场景。这意味着路由决策对于所有场景都是相同的。因为到所有场景的路由决策是相同的,但是每个场景的加载和卸载决策是不同的;在每种情况下,每个站点都可能存在自行车短缺或过剩的情况。在这种情况下,自然会出现以下具有随机需求的两阶段自行车重新定位问题(BRPSD)。在第一阶段,BRPSD 旨在为卡车构建一条路线,该路线从站点开始到站点结束,每个站点只访问一次。在第二阶段,BRPSD旨在确定所有车站和车辆段的最佳装卸量,以确保第一阶段给定路线后解决方案的可行性。BRPSD 的目标是最小化卡车的行驶成本(第一阶段目标函数)与所有站点的预期总罚款成本和仓库的持有成本(第二阶段目标函数)的总和。
3.1. Two-Stage Stochastic Programming Model
我们的目标是确定所有站点的访问顺序以最小化运输成本,以及确定每种情况下的装载/卸载决策以最小化总预期罚款成本和持有成本。我们将该问题表述为两阶段随机规划问题。鉴于场景发生的离散概率分布,本研究中针对 SPBSD 的公式如下:
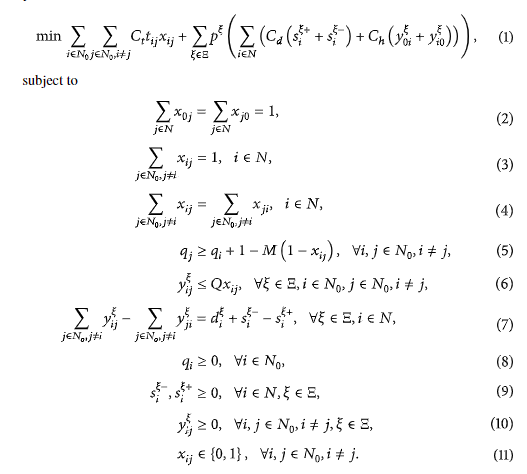
目标函数 ( 1 ) 被定义为所有场景下的运输成本和车站的预期罚款成本以及仓库的持有成本的加权总和。约束 ( 2 ) 表明卡车仅离开站点一次并返回站点。约束 ( 3 ) 确保卡车只能访问一个站点一次。约束 ( 4 ) 确保如果卡车到达一个车站,它必须离开那个车站。约束 ( 5 ) 是 subtour 消除约束 [ 27 ]。约束 ( 6 ) 确保车辆上的负载不能大于卡车的容量。约束 ( 7) 要求在给定站点装载到卡车上或从卡车上卸载的自行车数量等于该站点访问前后卡车负载之间的差异。约束 ( 8 ) 确保辅助变量是非负的。约束 ( 9 )-( 10 ) 确保车站自行车的过剩/过剩数量和卡车上的自行车数量是非负整数。约束 ( 11 ) x i j x_{ij} xij定义为二元变量。
4. Solution Algorithm 求解算法
当场景数等于 1 时,所研究的 BRPSD 简化为经典的确定性自行车重新定位问题,一个 NP-hard 组合优化问题。我们采用模拟退火 (SA) 来解决所研究的 BRPSD。SA是一种基于局部搜索的元启发式算法,通过在迭代过程中接受概率较小的差解来避免陷入局部优化。它已成功应用于各种确定性组合问题 [ 28 , 29 ] 和随机组合问题 [ 30 , 31 ]。
我们提出的算法,称为 S A B R P S D SA _{BRPSD} SABRPSD,包括两个阶段:构造初始解和通过邻域搜索机制改进初始解。本节的结构组织如下。在第4.1节中,我们提出了启发式方法来生成初始解。在初始化期间,必须做出两个主要决策:路由决策(在第4.1.1节中)和装卸决策(即库存决策)(在第4.1.2节中)。然后,在4.2节中,我们详细描述了在这个 SA BRPSD中使用的局部搜索运算符,即 Swap、Relocate 和 2-opt。之后基于SA BRPSD的主要算法流程框架在第 4.3节中介绍。
4.1. 构建初始解决方案
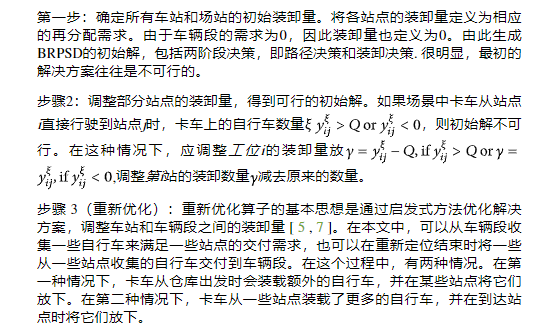
由于BRPSD是一个两阶段决策过程,本文的决策分为两个阶段:第一阶段确定路径决策,第二阶段确定装卸决策。构造初始解的过程如下,大致分为两个主要阶段。
4.1.1. 为所有场景构建初始路由
由于所有场景下的路径都是相同的,因此采用贪心启发式算法,通过忽略随机重分配需求,快速构建初始路径。在这项工作中,最近的原则被用来通过一个一个地插入站点来构建初始路径。
4.1.2. 确定每个场景的加载和卸载决策
对于给定的场景
ξ
\xi
ξ和场景中
i
i
i站相应的再分配需求
d
i
ξ
d^{\xi}_i
diξ, Second-Stage-Opt过程利用一个简单的原理快速生成初始可行的loading and unloading决策,然后使用重新优化启发式算子reoptimize heuristic operator来改进初始loading and unloading决策。。Second-Stage-Opt程序的详细信息如下:
4.2. Neighborhood Structure 邻里结构
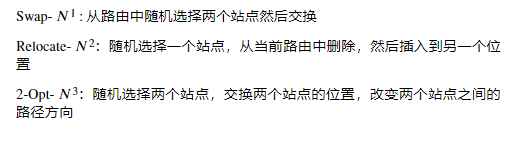
在本文中,本地搜索算子旨在路由决策。使用了三种经典算子Swap move、Relocate move和2-opt move。这些运算符也经常用于其他 BRP 问题。每个新的邻域解都是由这三个动作以相等的概率生成的。请注意,在执行局部搜索算子后,需要通过Second-Stage-Opt过程对新解进行改进以获得第二阶段决策。
4.3. The Proposed S A B R P S D SA_{BRPSD} SABRPSD

#### 算法1


5. Numerical Examples 数值例子
在本节中,通过数值例子来检验所提出的模型和求解算法的有效性和效率。此外,通过分析完美信息的期望值expected value of perfect information(EVPI)和随机解的值the value of the stochastic solution(VSS)来检验考虑随机需求的必要性。
在这项研究中,我们考虑 [ 24 ]中的实例来进行数值实验(实例可在http://www.or.unimore.it/site/home/online-resources获得)。实例的大小从 20 到 90 个站不等。总共有20个实例,每个实例有30个场景。在任何情况下,都会选择第一个站点作为depot.为了更好地分析相关参数对随机模型求解的影响,对于给定的集合 N 0 N_0 N0,站点 i i i和站点 j j j属于集合 N 0 N_0 N0 ,我们重新定义参数运输时间 t i j t_{ij} tij为 t i j = t i j / m i n { t i j } t_{ij} = t_{ij} /min\{ t_{ij} \} tij = tij/min{tij}。
S A B R P S D SA_{BRPSD} SABRPSD在 Matlab 中编码,所有计算实验均在配备 Intel Core i5-4590 CPU @ 3.30 GHz 和 4 GB RAM 的计算机上进行。每个实例运行 10 次,取最优解和平均解,用 10 次运行的平均计算时间来评价算法解的性能。
本研究提出的SA BRPSD依赖于五个参数,即初始温度 T 0 T_0 T0;最终温度 T E T_E TE;用于控制冷却的系数α ; 在一定温度下生成的解决方案的数量 I i t e r I_{iter} Iiter ; 和在一定温度下接受的解决方案的数量 M a x i t e r Max_{iter} Maxiter。经过一些初步实验,算法的结果是通过设置 T 0 = 20 , T E = 0.1 , α = 0.97 , I i t e r = 3 ∗ ∣ N 0 ∣ T_0 = 20,T_E = 0.1,α = 0.97,I_{iter} = 3 ∗ | N_0 | T0 =20,TE =0.1,α =0.97,Iiter =3∗∣N0∣ 和 M a x i t e r = ∣ N 0 ∣ Max_{iter} = | N_0 | Maxiter =∣N0∣。
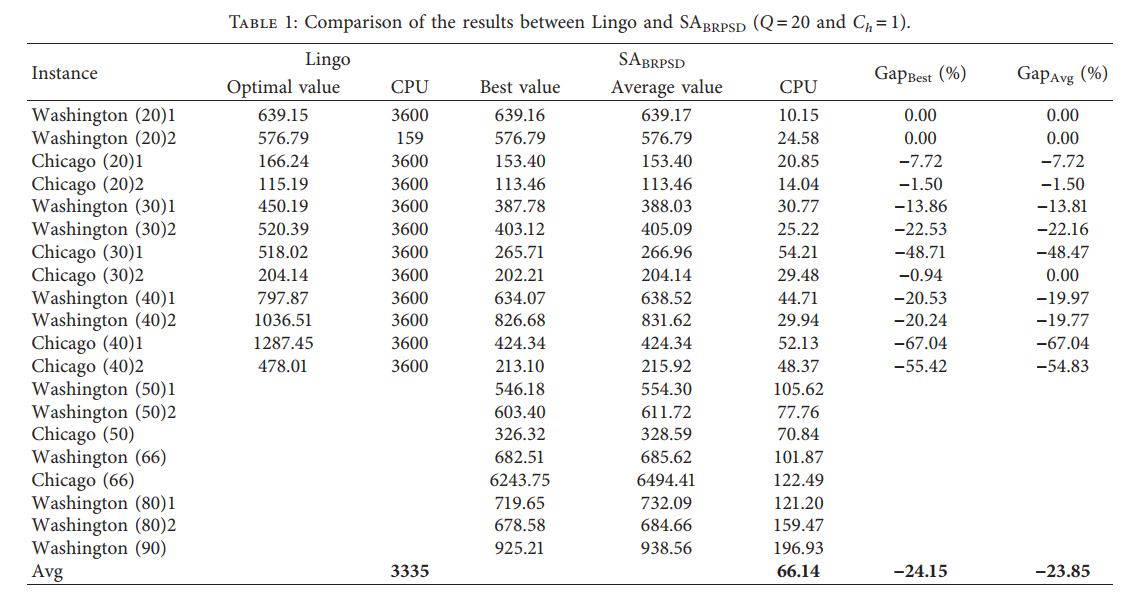
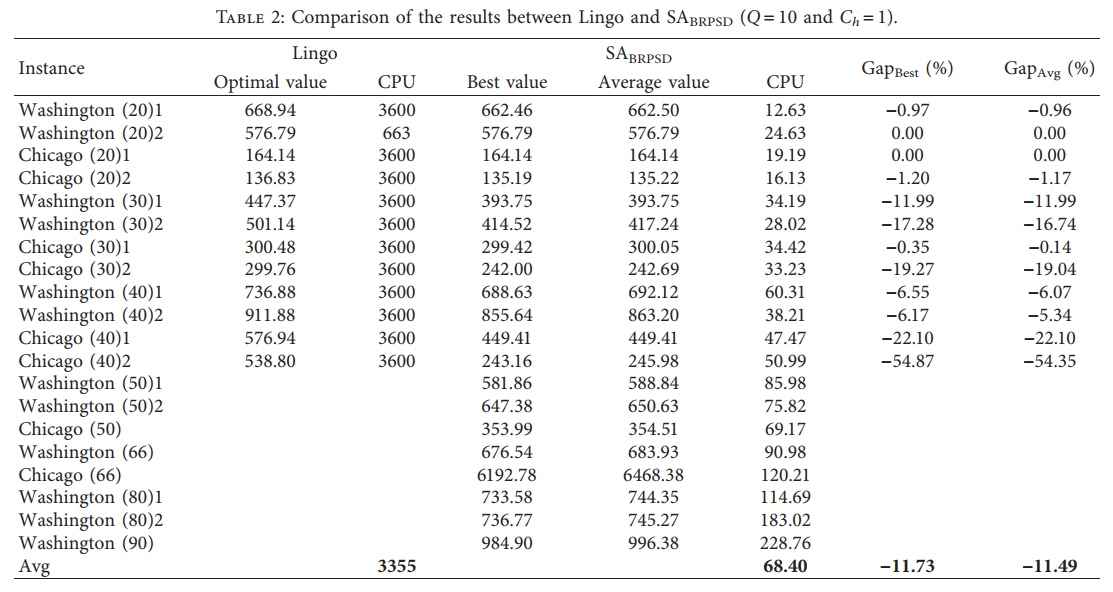
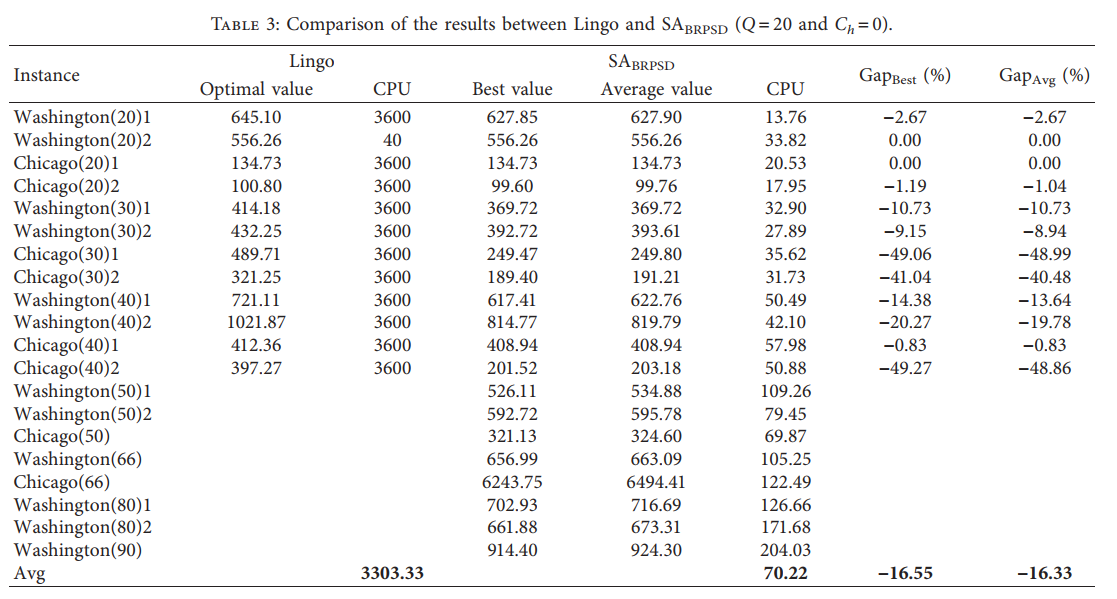
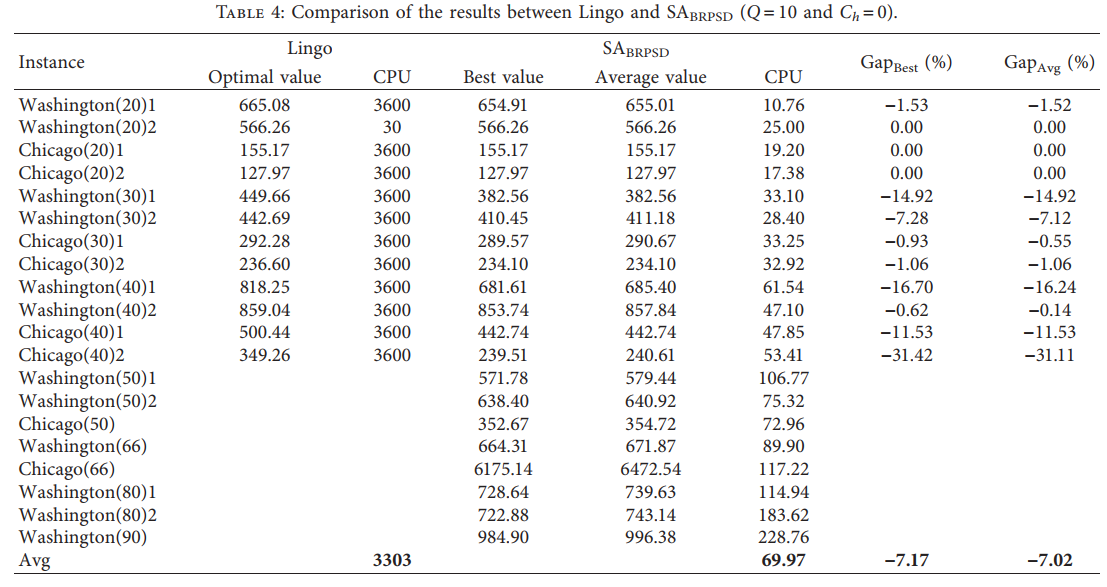
5.1. Lingo与SA算法的性能比较
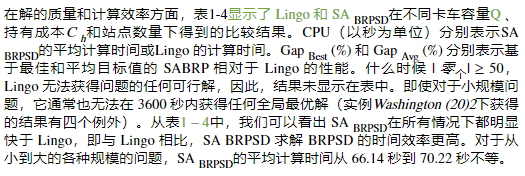
表1,2,3,4
5.2. 考虑需求作为随机参数的必要性
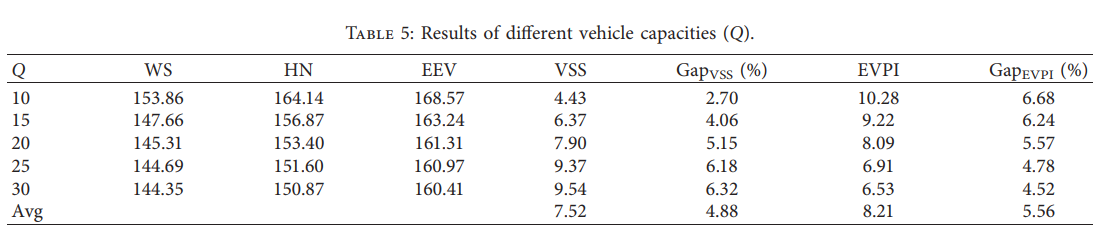
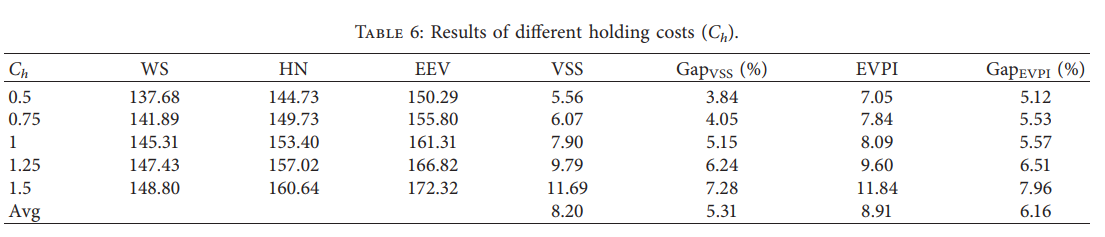
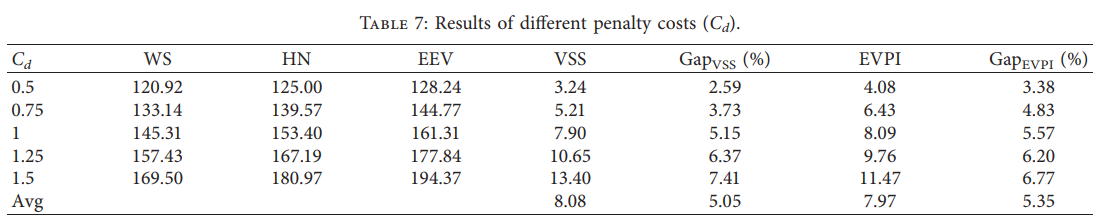
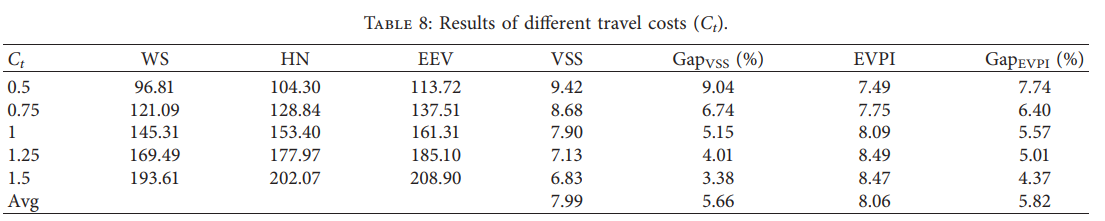
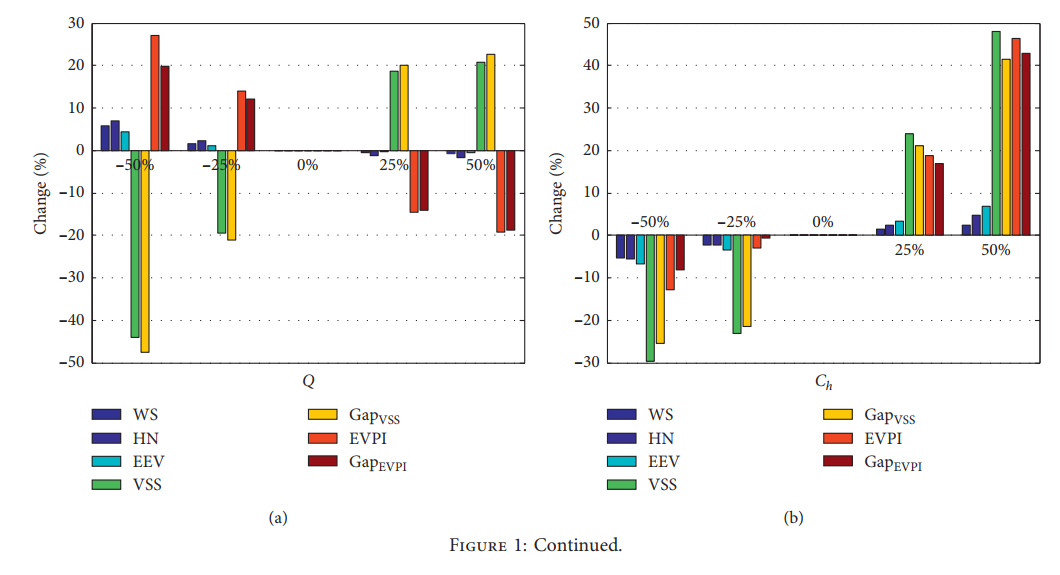
为了评估我们在本文中提出的随机模型的性能,我们使用了评估方法的两个概念:完美信息的期望值 (EVPI) 和随机解的值 (VSS) [ 32 – 34]. EVPI 衡量决策者准备支付的最大金额以换取关于未来的完美信息,而 VSS 衡量当决策者使用随机参数的预期值而不是模型中的随机参数时节省的成本量(金额由于忽略了不确定性而导致的成本)。EVPI 被定义为观望解决方案 (WS) 和此时此地解决方案 (HN) 之间的差异。在EVPI中,WS解是远见的期望值。我们通过对每个随机场景的结果进行平均来获得该值。HN 解是这个两阶段随机模型的目标值。VSS 被定义为使用期望值问题解决方案 (EEV) 与此时此地解决方案的预期结果之间的差异。在 VSS 中,EEV的值是通过将与随机需求均值相关联的优化问题的最优解输入到两阶段随机模型中得到的。VSS的 G a p V S S Gap_{VSS} GapVSS和EVPI的 G a p E V P I Gap_{EVPI} GapEVPI分别由VSS/HN 和EVPI/HN计算而来。
表5,6,7,8,图1
6。结论
在本文中,针对具有随机重新分配需求的自行车重新定位问题,提出了一种基于通用场景的两阶段编程模型。在所提出的模型中,第一阶段决策对应于路由决策,第二阶段决策对应于装卸决策。该模型旨在找到最佳路线和每个站点和场站的理想装卸量,以最小化预期运输成本、罚款成本和持有成本的加权和。然后,提出了一种模拟退火算法来求解该模型。执行了一些示例来评估所提出的模型和算法,随后进行详细的灵敏度分析,研究几个重要参数的变化如何影响所提出的模型和求解算法的性能。所提模型和算法对BSS运营商具有重要的理论和实践意义,可以降低BSS的运营成本,提高用户满意度。相反,除了共享单车之外,共享经济中的其他共享设施,如共享汽车,也需要搬迁,因此此类问题具有很强的应用背景。
未来,我们将应用鲁棒优化模型来解决自行车共享系统中具有随机需求的自行车重新定位问题 [ 35 ]。我们还通过将碳排放量添加到两阶段随机规划模型的目标函数中来考虑环境问题 [ 36 – 38 ]。















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









