







信道
空对地的信道采用的是自由空间无线信道模型
h
=
β
0
/
d
2
h = \beta_0 / d^2
h=β0/d2
β
0
\beta_0
β0指的是距离为1m时候的信道功率增益,
d
d
d表示两个节点之间的距离。
建模
使用欧几里得范数计算距离

表示无人机在一个时隙内运动的位移存在最大的距离约束。其他的约束类似。
采用算法
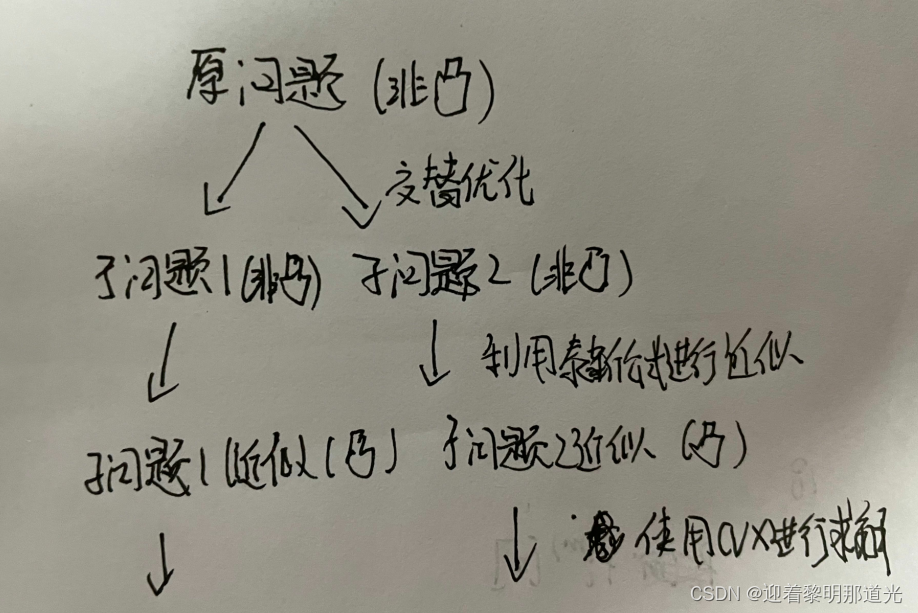
考虑联合优化无人机的轨迹和发射功率,来最大化可实现的平均保密率。对于建立的目标函数是一个非凸的目标函数,采用交替优化算法来进行求解(假设其中一个变量已经给出,优化另外一个变量,直到收敛。对于无人机轨迹优化子问题和发射功率优化子问题仍然是一个非凸的问题,采用SCA技术得到有效的解决方案。
近似为显函数
在这篇论文中,考虑目的节点的位置两个无人机已知,而窃听者的位置部分已知。因此,目的是最大化最坏情况下的保密率

根据可实现的窃听速率表达式形式,可以得到当
h
1
[
n
]
h_1[n]
h1[n]越大,
h
2
[
n
]
h_2[n]
h2[n]越小的时候,可实现的窃听速率越大,因此文中进行了替换。

当无人机1到窃听者的估计距离减去估计误差就是最佳信道功率增益。
SCA算法
凸问题是期待的优化形式,对于凸问题的形式可以理解成:最大化一个凹函数,约束都是凸函数。而子问题的形式是一个凹-凹的形式,那么利用泰勒公式就可以将其转化为凹问题。
文中作者进行计算之前,首先对目标函数进行变形,利用log函数的性质。
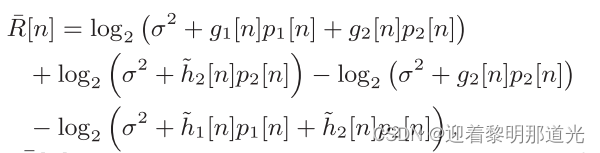
根据一节泰勒展开就可以近似成一个凸优化问题,利用CVX进行求解。每次迭代过程中局部点是上一次迭代过程得到的最优值,这样迭代下去直到收敛,得到近似的原问题的下界。

关于轨迹优化的时候,引入了辅助变量进行求解。这里的选取原则是目标函数的一个下界。
收敛
每次迭代的的目标值都是单调不减的,因此目标值有限,因此可以判断算法是收敛的。
仿真
轨迹优化的初始值设置为飞行-悬停-飞行的模型,在一个飞行周期内,无人机首先以最大速度飞向悬停点,然后保持悬停,最后以最大速度飞向终止点。同时也作为了对比算法。
仿真目前没有实现,后续实现再补充进来。
参考文献
Secure UAV Communication with Cooperative Jamming and Trajectory Control















 2410
2410











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









