







文章目录
论文基本信息
《Joint Resource Allocation and Trajectory Optimization in UAV-Enabled Wirelessly Powered MEC for Large Area》
《大面积无人机无线供电MEC的联合资源配置与轨迹优化》
IEEE INTERNET OF THINGS JOURNAL, VOL. 10, NO. 17, 1 SEPTEMBER 2023
摘要
本文研究了一种基于无人机(UAV)和中心云协作的无线动力移动边缘计算(MEC)框架。在该系统中,对于大面积服务的无人机,在用户设备(UEs)的可控能耗下,我们将MEC服务器和能量发射机(ET)的等待延迟最小化。因此,它可以为终端提供能源和计算服务,并将棘手的任务传输给云,以供进一步执行。让无人机服务所有用户,我们提出的方法使用长和短时间槽混合机制,并处理卸载决策和飞行区域选择混合策略的游戏架构在长槽,而资源分配和轨迹优化问题在短时间内解决。具体来说,考虑到有限的电池容量和无线功率传输(WPT)严重的能量传播损失,可以通过短时间内的队列优化来控制能耗。基于李雅普诺夫优化理论,我们将原始的非凸问题分解为一系列确定性优化子问题。此外,利用拉格朗日对偶理论、替代优化和逐次凸逼近(SCA)技术,我们可以得到原问题的封闭形式解。性能分析和仿真结果表明了该算法的收敛性和有效性。
1.引言
随着物联网(IoT)的快速发展,无数有前途的服务和应用促进了智能环境的实现,包括智能交通、虚拟现实和智能城市,这引发了智能应用程序[1],[2]的巨大进步。这些应用程序通常是计算密集型的和延迟敏感的,并且需要大量的大小受限和低功耗的移动设备来执行任务。然而,用户设备(UEs)通常配备了有限的计算资源和有限的电池寿命,这限制了它们在这些场景中的应用。幸运的是,移动边缘计算(MEC)和无线功率传输(WPT)为上述问题提供了一个有效的解决方案。MEC使计算资源更接近网络边缘[3],而UEs可以将其计算任务转移到边缘服务器上进行执行。近年来,MEC能够极大地提高移动设备的经济高效、节能的计算能力,因此受到了科学和业界的广泛关注。然而,在一些特殊的环境中,如地震、交通堵塞和音乐会,网络基础设施可能会受到自然灾害的破坏,或者边缘服务器的计算和通信资源不足。
为了解决上述情况下的问题,以及享受高质量服务(QoS),无人机(UAV)辅助MEC已成为一个很有前途的方案,最近引起了[4],[5]的重大研究兴趣。Jeong等人[6]认为MEC由单架无人机辅助,但目的是通过联合优化上行和下行通信的比特分配、卸载比和无人机轨迹的比特分配来最小化能耗。在[7]中,通过交替求解一种最大化能效的方法,交替求解给定无人机轨迹的无线电和计算资源的最优分配,以及基于给定资源分配方案的轨迹规划。虽然上述无人机辅助MEC系统的研究取得了一定的成果,但一般没有考虑到系统的延迟。在与延迟相关的研究中,Xu等[8]关注了多架无人机辅助的MEC系统的计算延迟问题,目标是任务完成时间最小化。Song等人[9]研究了大范围内无人机多播的完成时间和能耗最小化。此外,通过交替迭代获得最优的海拔高度和波束宽度,以最小化能量消耗。以上所有的文章都集中在优化处理和传输延迟上。然而,在一个任务密集型的场景中,会有大量的任务可以在缓冲池中积压,这意味着等待延迟将远远大于处理延迟,如何优化等待延迟是一个重要的挑战。
同时,无人机的能耗与系统的短延迟之间存在着明显的矛盾。为了解决这两个冲突,近年来许多研究人员对[10],[11]、[12]进行了广泛的研究。Zhang等人[13]和Yang等人[14]通过引入队列平衡延迟和能量,采用基于里昂诺的方法对任务队列进行分析,解决了能耗最小化问题。不同[13]和[14],马等[15]介绍了近地轨道(近地)卫星和最大化最低平均可达率在所有物联网设备以及物联网设备传输到近地卫星,和最小化无人机的能耗没有无人机数据积压。此外,在无人机机载能量有限的情况下,Zeng等[16]旨在通过联合设计无人机轨迹和通信资源分配,最大限度地提高地面节点通信吞吐量的加权最小值。然而,UE的电池容量是有限的,基本上不可能在特定情况下补充能量,如地震、交通堵塞和正常方式的音乐会,包括从电网充电或从环境中收集能量(EH)(如太阳能和风能)。这是因为在上述情况下,UEs通常与电网断开连接,可再生能源的间歇性和随机性也使EH难以提供高QoS。然而,在上述情况下,补充能源是满足用户基本需求的必要。因此,找到一个可靠的能源补充方案是极其重要的。
与EH相比,WPT技术采用专用发射机传输射频(RF)能量,为终端供电。WPT是一种解决电池容量不足问题的解决方案,可以提供比EH更可控、更稳定的电源,因此,我们可以利用WPT技术在地震等临时事件下延长电池的寿命。需要注意的是,WPT技术是一种很有前途的提供能源供应的解决方案,但在使用时存在严重的传播损失,并且可以严重降低收获的功率水平,这限制了其在早期阶段的应用范围。然而,随着WPT技术的爆炸性发展,利用射频信号传输能量以及其他新兴技术[17],如相控阵天线和可重构智能表面,提高了WPT的性能,使远场WPT能够在大范围的[18]内发挥作用。此外,也有很多家初创公司(如动力传输、传输网络和能量传输)开发了基于射频的商业化WPT产品,用于中远程无线充电应用。最近,WPT已经被集成到无线通信和计算网络中,用于各种新的应用。因此,WPT是一种很有前途的技术,对于某些特定的场景尤其有价值。不同于传统的能量发射器(ETs)在固定的位置,低空无人机可以作为一种新型的空中发射机,通过接近无人机,可以灵活飞行地为附近的低功率设备充电。因此,无人机支持的WPT框架已经成为延长低功率设备的使用寿命的一个有前途的解决方案。Liu等[19]将无人机作为移动ET,通过联合优化CPU频率、卸载量、发射功率和轨迹,使无人机所需的总能量最小化。Song等人[20]提出了一种针对物联网系统的无线传感器网络,采用集成的EH和WPT技术来提供连续和可控的能源供应。在[21]中,Du利用WPT技术,提出了一种基于工作流结构的新的TDMA方案,以固定的轨迹降低UEs的能耗。然而,当UEs远离ET时,由于信号的衰减,它们很难获得能量,需要更多的能量。由于无人机可以尽可能接近无人机,这扩大了WPT的服务覆盖范围,提高了输电效率[22]。此外,使用已启用的WPT体系结构也可以提高计算性能。
在上述大多数论文中,研究者认为服务领域始终在无人机的通信覆盖范围内,这与无人机在实际情况下有限的通信覆盖范围不一致。由于上述问题,我们制定一个新的方案,整个区域可以分为多个小区域可以由无人机,并利用长和短时间槽混合机制,我们可以控制无人机的飞行在小区域和不同区域之间的切换。
同时,我们重新考虑使用无人机启用和无线动力的MEC网络的计算卸载和资源分配,其中每个UE的任务可以自己执行,卸载到无人机,或进一步传输到云(通过无人机),以进行更密集的计算。本文研究了无人机无线MEC网络,研究了可控能耗下的等待延迟最小化问题。其主要贡献总结如下。
- 这是首次通过联合优化卸载决策、资源分配和飞行轨迹,研究无人机辅助MEC系统中可控能耗中UEs的等待延迟问题。我们考虑了一个无人机覆盖大面积,可以分为多个小区域的实际模型。为了最小化终端的等待延迟,我们利用长时间和短时间槽混合机制,处理长时间槽内的卸载决策和飞行区域选择,并在短时间内解决资源分配和轨迹优化问题。
- 由于UEs通过一定的概率分布来选择动作,我们利用混合策略模型而不是纯策略来解决长时间槽内的卸载决策和飞行区域选择问题。我们详细介绍了基于斯塔克尔堡博弈框架的模型,讨论了纳什均衡(NE)的存在唯一性,并得到了通过匹配博弈法得到每个UE的最佳策略。
- 我们共同优化了每个短时隙内的资源分配和飞行轨迹。利用李亚普诺夫优化方法,可以将长期随机优化问题转化为只需要当前网络信息的在线确定性优化过程。采用问题分解方法将非凸问题分解为四个子问题,分别采用拉格朗日对偶法、交替优化法和连续凸逼近(SCA)技术求解。
- 性能分析通过选择一个合适的控制参数v,证明了李雅普诺夫优化方法的渐近最优性,并证明了所有虚拟队列的上界,并保证了该方法的可行性。仿真结果验证了理论分析结果的有效性,并证明了该方法的有效性。
本文的其余部分组织如下。在第二节中,详细阐述了系统模型。第三节阐述了长时槽下无人机卸载决策和无人机覆盖区域选择问题。在第四节中,我们提出了在短时间插槽下的资源分配和无人机轨迹的在线优化。第五节对系统性能进行了理论分析,第六节进行了仿真结果。最后,我们的结论将在第七节中提出。
2. SYSTEM MODEL 系统模型
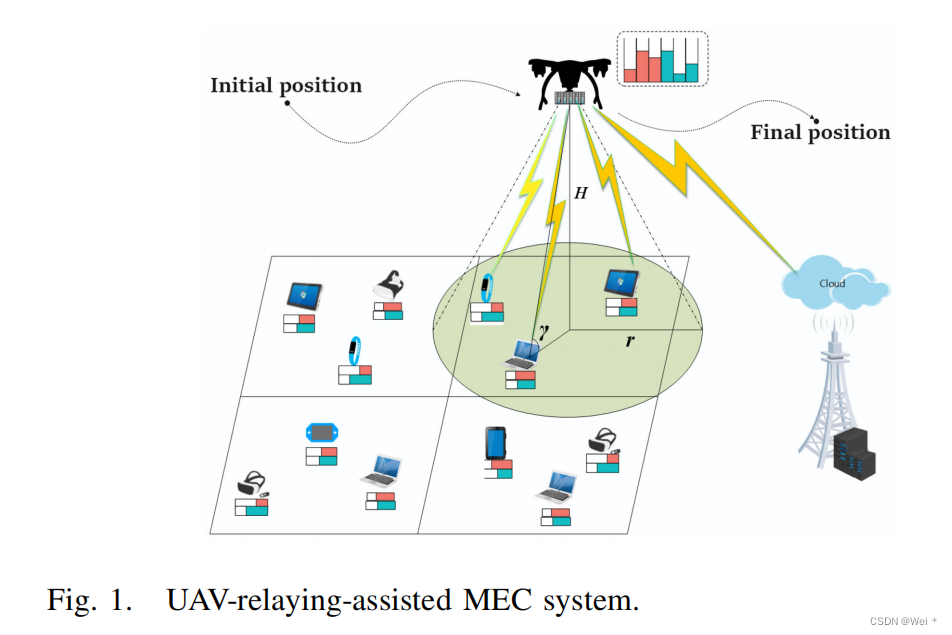
如图1所示,我们考虑了一个三层网络模型,由一组表示为M {1,2,…,M}的地面UEs、配备MEC服务器的无人机和中心云(基站)组成。无人机支持的MEC系统是基于软件定义的网络(SDN)框架,可以提供集中的网络控制和资源管理。基站收集覆盖区域内系统的前期实时信息,包括用户位置、无人机位置、无人机速度、数据信息等,再分发给每个用户和无人机进行所需的信息交换。因此,在本文中,**我们认为无人机可以感知到所有终端的先验信息整个服务区,具体原因详见备注1。此外,由于先验信息传输量较低,因此忽略了该过程造成的额外能耗。**由于MEC服务器的容量有限,可以将一些棘手的任务传输到云服务器上进行进一步的分析和完成。为了更好地提高系统资源的利用率,我们假设ue的任务可以分为独立的、细粒度的子任务,并可以在时间段内进行处理。一般来说,无人机需要服务的面积更大,我们可以将整个所需的服务区划分为几个小区域。为方便起见,本文考虑了划分方案是平均划分。我们利用长和短时间槽混合机制,平均将总时间ζ分为K长时间槽长度T,即ζ = K·T。然后,一个长时间槽可以统一划分为N短时间槽长度τ,即T = N·τ和t∈T {1,2,…,N}。由于τ足够小,无人机的位置在插槽t内保持静态。在每个短时间内,所有∈都会以一定的概率生成一个新任务,即随机生成一个大小为Ai(t)(∈)的新任务。不失一般性,我们假设Ai (t)是独立且同分布的(i.i.d.)。在所有具有平均到达率E{Ai (t)} = λ的时间块上,其中λ是一个经验参数,可能在不同的地方和时间[23],[24]。φ(周期/位)表示计算1位数据所需的CPU周期。
我们考虑一个三维笛卡尔坐标系。地面UE i的水平位置表示为Si =(Xi,Yi),i∈M,无人机在固定高度H飞行,其水平坐标用Su (t) =(Xu (t),Yu (t))表示。此外,由于无人机所服务的无人机在地震、交通堵塞、音乐会等场景中不能随意移动,因此我们不考虑无人机覆盖区域内无人机的移动性。无人机与UE i之间的距离可以表示为di (t) = H2 + ||Su (t)−Si||2 2。无人机轨迹约束如下:

其中SI和SF表示无人机在小区域内的初始位置和最终位置,v (t)为无人机在槽t期间的平均速度,vmax为最大飞行速度。当前长时槽的初始位置是之前长时槽的最终位置,最终位置是与当前覆盖区域和下一个区域相邻的边界点。
由于所有用户都是自私的,每个用户无法在做出决策前获得他人的卸载决策信息,为了获得无人机服务,覆盖区域以外的用户可能到达无人机的覆盖区域,从而导致原本在服务区域的用户之间的竞争计算资源。与大多数调查(例如,[14]和[25])类似,从MEC或云服务器下载计算结果的时间和精力成本被省略了,因为与考虑的卸载成本相比,它们可以忽略不计。我们详细说明了模型的各个部分如下。
A. Communication Model 通信模型
如[26]和[27]所述,UE i和无人机之间的无线信道可以被描述为视距(LoS)链路和非在线视距在线(NLoS)链路,其中的路径增益由[27]给出

其中,ξ = 0和ξ = 1分别表示LoS和NLoS链接。fr为载波频率,c为光的传播速度。η0和η1是LoS和NLoS链接的自由空间路径损失顶部的过度路径损失,由环境(郊区、城市、高层城市或其他)决定。LoS链接的概率为PLoSi(t)=(1/[1+Aexp(−B[γi(t)−A)]))[27],其中A和B是取决于环境的定值,γi(t)=(180/π)sin−1(H/di(t))是图1所示的仰角。然后,NLoS链路的概率可以记为PNLoSi(t)=1−PLoSi(t)。因此,我们可以得到信道的平均路径增益如下[26]:

我们认为该系统在正交频分多址(OFDMA)协议下工作,UE i与无人机之间的传输速率如下:

式中,Pi (t)为UEIi的发射功率,N0为噪声功率谱密度,W为总信道带宽,βi (t)为带宽比,βi (t)∈[0,1]。根据总带宽有限的限制,我们有

由于无人机与云之间的距离一般远大于无人机的飞行距离,我们将其视为一个固定的du值,两者之间的传输速率表示如下:

式中,Wu为无人机与云之间的带宽,Pu i (t)为无人机分配给UE i的传输功率,hu为无人机与云之间的信道功率增益,表示为hu = [4πdufr/c]−2/η0。
B. Task Queue Model 任务队列模型
我们假设每个UE都有一个本地和无人机的任务队列,这遵循先入先出的原则。当新任务到达时,它们将首先被存储在UE的缓冲区中,然后要卸载的任务量被删除并存储在无人机的缓冲区中,一些棘手的处理任务可以进一步传输到云。由于中心云具有强大的计算和存储能力,因此其中没有任务队列积压。
我们将Dl i (t)定义为本地计算任务的数量,而Du i (t)是从UE i卸载到无人机的任务。UE i的CPU周期频率为fil(t)(以周期/s为单位),其限制为最大计算容量f l max。因此,表达式fil(t)·τ表示UE i可以在一个很短的时间插槽内提供总的CPU周期。然后,应该有满足[13]

设Qi (t)是插槽t中UE的本地任务积压队列,以及Du i (t) + Dl i (t)≤Qi (t)。本地任务队列的更新过程如下:

其中[x] + max{x,0}。
我们将Fu定义为MEC服务器的总CPU周期频率,Fc max−i是云分配的UE i的最大频率,f i u (t)和f i c (t)分别是MEC和云服务器分配的第i个UE的CPU频率。由于云有足够的计算资源,并且每个UE的任务都可以被分配一个单独的处理器,因此应该遵循以下约束条件:

同样,我们将Duu i (t)和Duc i (t)表示为无人机和云上的任务处理量,可以如下[14]所示:
将Li (t)定义为MEC的任务队列,显然,我们可以得到: Duu i (t) + Duc i (t)≤Li (t)。然后,无人机任务队列的更新过程如下:

C. Energy Consumption Queues Model 能耗队列模型
能源消耗包括计算、卸载和飞行消耗[13]。此外,WPT技术和EH也是重要的组成部分,我们将详细介绍能源消耗模型如下。
1) Computing Consumption 计算消耗
由于动态电压扩展(DVS)算法和动态功率管理(DPM)策略可以通过调节CPU周期频率来延长电池寿命,这已经在[28]中引入。UE在本地、无人机和云的任务能耗可以表示为[13]:
其中,κl、κu和κc分别为处理器芯片在本地、无人机和云上的有效电容系数。
2) Offloading Consumption 卸载消耗
为了卸载部分任务,每个终端和无人机都配备了一个可变传输功率的通信模块。el−ui(t)和eu−ci(t)分别表示从ul−到无人机、无人机到云的传输能耗。然后,它们可以表示为:

由于无人机的所有卸载任务都由云处理,我们可以得到:τ·吴·log2(1+((Pu(t)·胡(t))/(吴·N0))=([fi(t)·τ)/φ),从中我们可以获得Pu(t)=([WuN0]/[胡(t)))(2([fc(t)]/Wuφ)−1)。
3) Flying Consumption
为了获得无人机的推进能量消耗,我们假设无人机在短时间内进行均匀直线飞行,这已在许多研究[10]广泛采用。与[13]和[22]类似,我们在现有的工作中考虑了简化的模型。推进能量消耗由速度矢量决定,可以表示如下:

其中,Mg表示无人机的重量。
4) Energy Harvesting
为了提高无人机的耐久性,我们考虑在无人机上部署可捕获可再生能源(如风能和太阳能)的EH设备来供应无人机。由于绿色能量的可用性是随机的,因此由EH设备收集的能量被缓存在电池中。无人机的能耗分为四个部分:1)通信能耗;2)计算能耗;3)飞行消耗;4) ET消耗。一般来说,通过EH获得的能量相对较小,不能满足无人机的全部能耗,因此,通过EH收集到的能量只能满足无人机能耗的一部分。与飞行和ET消耗相比,通信和计算消耗占总能量消耗的比例非常低。为了保证无人机完成卸载服务,我们假设EH设备收集到的能量将用于通信和计算。此外,由于飞行和ET消耗相对较大,这两部分由无人机内部电池提供。EH (t)是槽t中收获的能量,在[0,EH,max]区间内呈均匀分布,EH,max是收获的最大能量。
5) WPT Technology
我们假设无人机配备了ET,可以为UEs提供WPT服务。为了避免WPT与信息传输之间的干扰,给WPT分配了一个正交信道。PWPT i (t)是从无人机到UE i的传输功率,最大为PWPT,最大。无人机发射的能量和UE i接收到的能量可以表示如下:

其中,η为UE的能量充电功率转换效率。
我们假设每个UE、无人机和云分别都有一个电池。为了描述电池功率的使用情况,我们建立了一系列的能耗队列。表示UE i、无人机和云处理的能耗队列为Hi (t)、G (t)、I (t),J (t)、V (t)为无人机飞行和WPT的能耗队列。因此,Hi (t)、G (t)、I (t)、J (t)和V (t)演变如下:

其中Ec是云中处理任务的长期能耗预算,Eu是无人机飞行消耗的长期预算,
E
W
P
T
E_{WPT}
EWPT是无人机发射时能耗的长期预算。
D. Time Delay Model 时间延迟模型
基于以上分析,将整个任务执行的延迟分为等待延迟和处理延迟。在我们的系统中,由于任务的积压,任务的等待延迟远远大于处理延迟。这导致我们专注于如何减少等待延迟,而不是处理延迟。由于我们在整个短时间段内不断地处理任务,所以处理任务的延迟可以是一个固定的值[13],[21]。为了尽量减少系统的延迟,我们应该尽量减少等待延迟。根据Little定律[29],我们可以得到系统在第t槽处的任务排队平均等待延迟,可以表述如下:

基于以上的描述,我们发现随着f i u (t)或Pu i (t)的增加意味着能量消耗的增加,而等待延迟有相反的趋势。此外,在飞行和能量传递过程中,能量消耗与等待延迟之间也存在收缩。因此,盲目降低能耗会显著增加延迟,严重影响用户终端的生活质量。为了使UE有更好的体验,我们将系统的成本设置为UE的等待延迟,并受到每个队列的稳定性的约束。此外,我们还发现无人机的位置也会影响ue的策略选择。如果UE选择卸载,我们需要进一步确定资源分配和飞行轨迹。由于任务到达和绿色能量收集的随机性,以及UE策略决策的不透明度,整个系统变得更加随机。解决这样一个最优问题是一项挑战。
为了解决上述问题,我们首先设计了一个具有斯塔克尔堡博弈架构的混合策略博弈模型来解决长时间槽内的卸载决策和飞行区域选择问题,本文将在本文中详细介绍第三节。然后,通过在线优化资源分配和无人机轨迹,实现了在可控能耗范围内保证等待延迟最小的目标。我们将在第四节中表述这个问题,并得到一个接近最优解的封闭次优解。
备注1:虽然有很多文献研究感知范围对系统性能的影响,如[30],但为了避免偏离资源分配和轨迹优化的重点,转向其他方面,本文选择不讨论。因此,我们认为除非另有说明,无人机可以在基站的帮助下感知整个服务区,并指定更详细的感知范围分析作为我们未来的工作。
3.GAME PROBLEM UNDER THE LONG-TIME SLOTS
在本节中,我们将UEs的卸载决策和无人机的覆盖区域问题表述为长时槽中的两阶段斯塔克尔堡博弈,上层是无人机作为领导者,下层是UEs作为追随者。因此,玩家之间存在一个不同的层次结构,和无人机可以实时分配信息终端,如无人机的位置,MEC服务器的计算能力,和队列积压之前的第一步,和终端后的领导者。在本研究中,无人机将根据槽的总体任务积压情况,飞到槽+1中任务积压最严重的小区域,并为该区域的无人机提供计算服务。
由于UEs通过一定的概率分布来选择行动,我们引入了一个混合策略博弈论。我们将基本计算卸载游戏模型定义为G(){M,(Pri())我∈M,(我我())我∈M,(ui)我∈M,u},其中我()∈[0,1]是我的卸载概率,我()∈[·ϑminϑmax]是无人机服务概率,其中ϑmin和ϑmax分别是通信范围内无人机的最小和最大无人机服务概率。而∈[0,1]是一个控制参数,则·ϑmin表示在通信覆盖范围外的ue的接受概率。ui是UE的回报,u是无人机的回报。让Pr−i(){Pr1(),…,Pri−1(),Pri+1(),…,PrM( )}表示除UE i外的所有UE的卸载概率,那么我们可以在计算卸载游戏[31]中引入以下网元的概念。
定义1:如果没有UE可以通过改变其卸载概率来提高其收益,则可以说一个计算卸载概率向量Pri()∗可以实现一个NE

由于无人机的机载资源有限,它只能在每个长时间插槽中服务于大多数Y用户。如果无人机在槽中向UE i提供计算卸载服务,我们将Qi( )定义为UE任务队列的值。并且,我们考虑所有UEs的策略集是θ ( ) {θ1( ),θ2(),…,θM()},其中θi( )表示服务指标变量,即,如果无人机为UE i提供服务,则θi( ) = 1,否则θi( ) = 0。所以我们可以定义历史平均处理量体验函数i( ) =([ ς=1 θi(ς)Qi(ς)]/[ ς=1 θi(ς)]),该函数显示了UEs任务队列中变化的历史平均值。
为了获得服务机会,终端可以转移到其他地区。由于移动用户的到来可能会导致一些位于无人机服务的小区域的用户失去计算卸载服务的资格,从而导致队列延长,QoS可能大大降低。将δ和di( )分别定义为UE i的移动惩罚系数和i的最小移动距离。我们可以获得额外的收入函数i( ) = [Qi()−i()] +−δdi( ) for UE i。当i( )≤0时,表明UE i在无人机辅助计算中的参与不利。因此,我们将B{M|i( ) > 0}定义为计算卸载博弈中所涉及的ue的集合。
由于无人机是无私的,它将通过最小化任务队列来最大化系统吞吐量。并根据任务队列对单元单元进行排序,并按顺序分配选择概率,详见算法1。

接下来,我们将讨论当UE选择不同的决策时的好处。根据以上讨论,有三种情况。情况1,UE决定卸载,无人机同意,第UE的收益是q0 +i(),其中q0是一个大于任何δdi()的常数。案例2,UE i决定卸载,但无人机拒绝了它,它的回报是q0−δdi( )。案例3,UE i决定不卸载,它的回报是q0。为了获得最高的收益,UE i的优先任务是在得到自己的最优策略之前预测其他UEs的卸载概率。将Prj−i()定义为由UE预测得到的UE j的卸载概率,第j个UE关于Prj−i()的伪收益函数为
并且,我们将伪收益最大化问题定义如下:

上述问题是一个线性规划问题,根据约束条件,我们可以得到得到的最优卸载概率如下:

由于ithUE的收益值与三个变量有关,即Pri( )、Pru i ( )和Prj−i ( )∗,因此UE i的效用函数可以列出如下:
其中,ρ代表UE i的冒险惩罚。
根据UE i的效用函数,玩家i的最佳卸载概率表示如下:

其中,操作符[x] 1 0可以导致Pri()∗∈[0,1] [32]。
为了进一步得到UE的最终策略,我们利用匹配博弈算法,将期望收入定义为其偏好函数

θ(+ 1)是槽+1中设置的终端策略,所选终端中通过搜索方法得到最优卸载决策集,写如下:

最后,我们可以在插槽+1中获得一组涉及卸载服务的终端N。针对无人机长时间槽飞行面积的混合策略博弈算法显示为算法2。
4.ONLINE OPTIMIZATION UNDER THE SHORT TIME SLOTS
A. Problem Formulation
在这部分中,我们的目标是通过联合优化CPU周期频率、发射功率分布、信道带宽分布、无人机运动轨迹,和WPT的能量收集来最小化系统的等待延迟。平均等待延迟被定义为一个系统性能指标。因此,对最优化问题的表述如下:
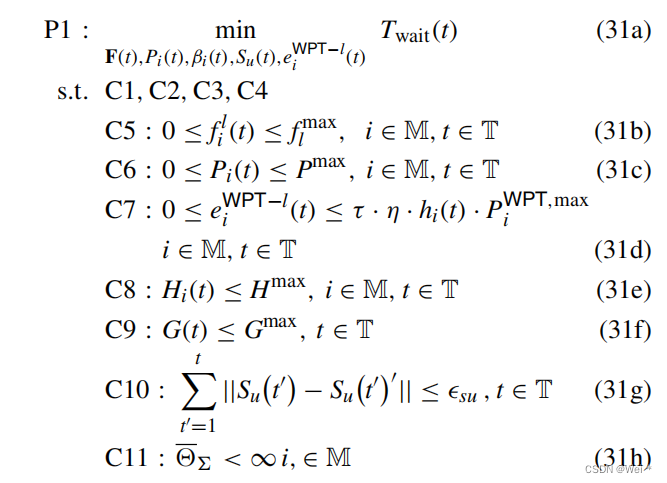
其中,F (t) = {f i l (t),f i u (t),f i c (t)|i∈M}。在问题P1中,C1表示无人机的飞行极限。C2确保所占用的信道带宽之和不超过分配给卸载任务的带宽。C3、C4、C5分别表示无人机、云分配的UE和本地UE的计算频率分别不超过设备的最大值。C6保证UE i的发射功率小于所提供的最大发射功率。C7是指用户通过WPT接收到的能量小于通道衰减后无人机ET发射的最大能量。C8和C9表示UE i和无人机的电池容量分别小于Hmax和Gmax的最大存储功率。C10表示无人机的历史轨迹不能被修改,其中su是一个较小的常数,Su(t)是历史轨迹。最后,通过C11保证了队列的稳定性,其中

而优化问题P1是一个分数阶随机混合整数非线性规划问题,因为变量的变化和耦合,这是np困难的。
B. Problem Transformation⭐
在本节中,我们首先介绍p1的一个等价变换。然后,利用李雅普诺夫优化技术将初始问题分解为四个子问题。此外,李亚普诺夫优化的引入使我们的细粒度卸载方案更适合长期的应用需求。在下面,我们将引入一个遵循以下内容的变量:

受丁克尔巴赫算法的启发,问题P1可以重新表述如下:
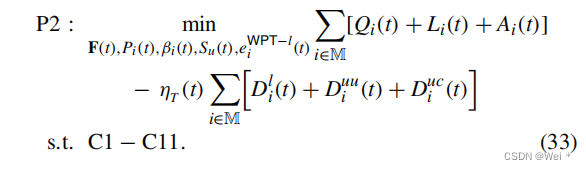
等效变换在[33]中已被证明是有效的,类似的方法在[34]和[35]中已被广泛采用。为了保证任务和能耗队列的稳定性,我们首先定义李亚普诺夫函数如下:
其中(t)={Q(t)、L (t)、H (t)、G (t)、V (t)、J(t)、I(t)}包括任务队列和能耗队列的所有积压,其中Q (t) = {Qi (t)|i∈M}、L (t) = {Li (t)|i∈M}和H (t) = {Hi (t)|i∈M}。漂移U((t))的定义如下:

然后,就得到了漂移加惩罚的函数
其中,V≥0是衡量系统效用和队列稳定性之间的权衡的控制系数。为了最小化漂移加惩罚,我们最小化由引理1给出的Uv((t))的上界。
引理1:对于任意变量和队列,以下不等成立:
其中B是一个独立的常数。
证明:见附录A。
基于(37),我们可以通过删除独立于优化变量的项来得到P2的修改版本。
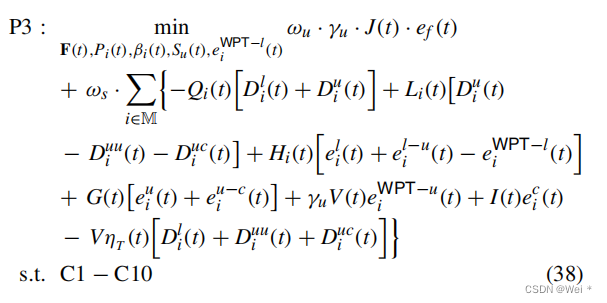
式中,γu为机载电池的能耗衰减因子,ωu和ωs分别为无人机飞行消耗和系统能耗的加权系数。考虑到问题P3中除发射功率和信道带宽分布外,其他变量不存在耦合关系,我们对算法进行解耦,以优化CPU周期频率、发射功率分布、信道带宽分布、无人机轨迹和WPT能量采集。
C. Problem Solution
1) CPU Cycle Frequency Optimization
考虑到UE、无人机和云的CPU周期频率相互独立,且变量对应的优化部分是凸的,我们分别进行了优化。
5.ALGORITHM ANALYSIS
6. SIMULATION
7.结论和未来的工作
在本文中,我们研究了长时间和短时间内无人机无线移动通信系统在计算卸载模式下的卸载和资源分配问题。我们的目标是通过联合优化卸载决策、资源分配和飞行轨迹,来最小化可控能耗下的等待延迟。在长时间插槽中,我们利用基于斯塔克尔伯格博弈的混合策略模型,处理卸载决策和飞行区选择。在短时间内,我们把问题分成四个部分利用拉格朗日对偶性、交替优化和SCA等方法求解资源分配和飞行轨迹问题。仿真结果表明,该设计方法可以在基线上实现显著的性能改进。在未来的工作中,我们将把研究扩展到可变槽的划分、小区域的动态划分和多架无人机的协同合作。

















 2708
2708











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











