







我在上面讲课哦
目录
第9章 位移测量
目录
9.1 概述
9.2常用的位移传感器
9.3位移测量的应用
9.1 概述
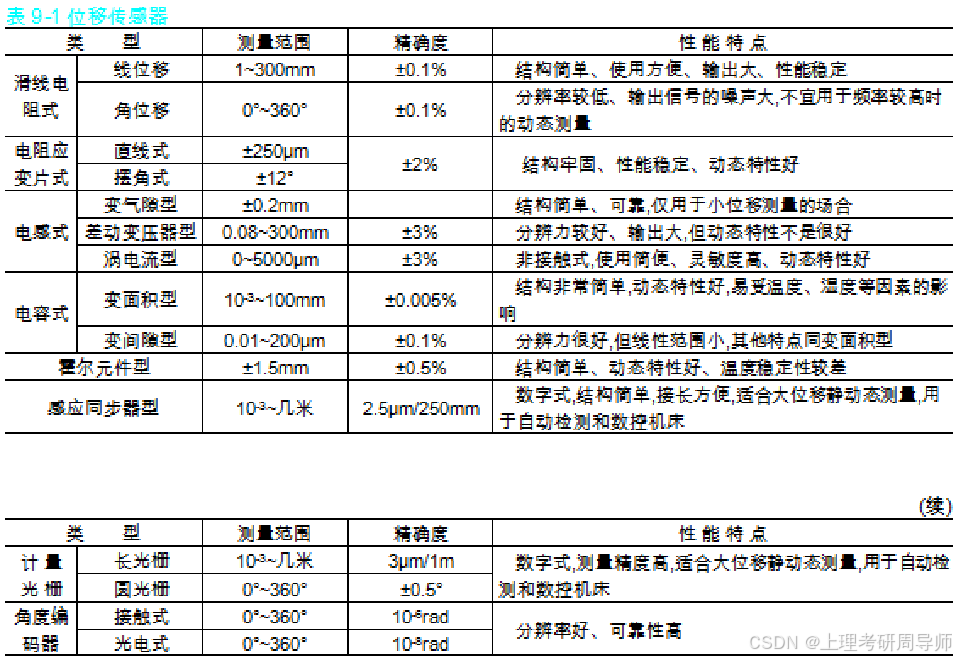
位移测量是线位移和角位移测量的统称。测量时应根据具体的测量对象,来选择或设计测量系统。在组成系统的各环节中,传感器性能特点的差异对测量的影响最为突出,应给予特别注意。表9-1介绍了一些常用的位移传感器及其性能特点,通过该表可以对位移传感器有一个总体的了解。
由于在不同场合下对位移测量的精度要求不同,位移参量本身的量值特征、频率特征不同,自然地形成了多种多样的位移传感器及其相应的测量电路或系统。
9.2 常用的位移传感器
9.2.1 滑线电阻式位移传感器
滑线电阻式或电位计式位移传感器的工作原理已在第4章中做了介绍。这里介绍一种测量电路(见图9-1)。由图可见,当滑动触点随被测元件产生位移x或角位移α时,均可改变触点与任一接点间的电阻值Rx,且Rx∝x/l,即阻值与位移x(或α)成正比。
图9-1c为桥式测量电路,供桥电源为具有一定精度的直流稳压电源,电桥的输出直接用光线示波器显示。
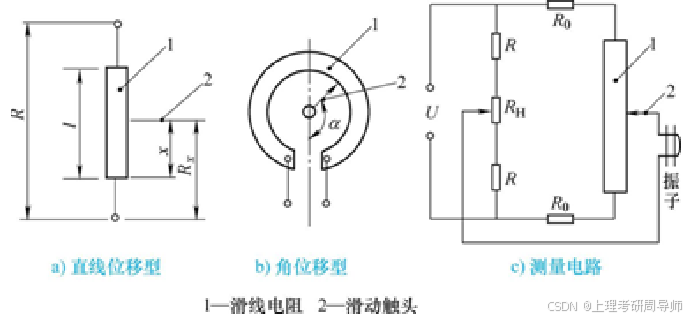
由于电桥必须输出一定的电流驱动光线示波器的振子工作,同时又要求输出在一定的范围内是线性的,因此桥路中接入了电阻R0。为了保证电桥输出的线性,要求桥臂值的相对改变量ΔR/R控制在10%以下。电阻阻值的大小就是按此条件来选取的,但R0也不宜过大,否则会降低电桥的输出功率。为了提高电桥的灵敏度,还要求各桥臂的阻值相等,即组成全等臂电桥。电位器RH是用于预调平衡的。
滑线电阻的结构形式有缠绕式和单丝式。缠绕式是用电阻丝缠绕在绝缘骨架上制成。骨架的材料常用电木或塑料,其形状可根据需要而定。缠绕时应保证一定的张力,且缠绕均匀。单丝式是用单根电阻丝张紧后固定在绝缘骨架的槽中而成。除自制的滑线电阻外,可利用现有的产品,如滑线变阻器、多圈电位器等。
滑线电阻式位移传感器具有结构简单、使用方便、输出大、性能稳定等优点,但由于触头运动时有机械摩擦,其使用寿命受限、分辨率较低、输出信号噪声大,故不宜用于频率较高时的动态测量。
9.2.2 应变片式位移传感器
这种传感器的测量原理是利用一弹性元件把位移量转换成应变量,然后用应变片、应变仪等测量记录。测量位移的弹性元件和应变片的组成,称为应变片式位移传感器。它的种类也有多种,其差别就在于弹性元件的结构形式。常用的弹性元件有悬臂梁、圆环和半圆环等。
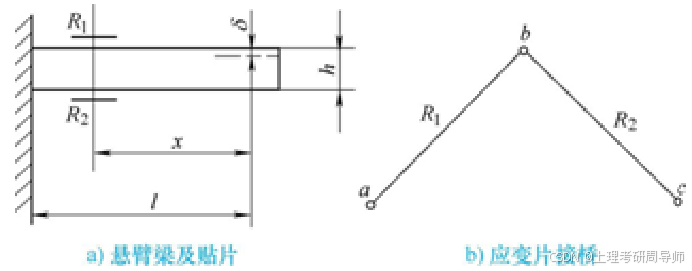
图9-2所示的悬臂梁弹性元件,若在其自由端有位移δ,则梁的表面会产生弯曲应变ε,其值与δ成正比。通过图示的贴片测出应变ε,就可测得位移量δ。位移δ与应变ε间的关系随梁的结构形式不同而异。
对于等截面梁,贴片处的应变ε与位移δ间的关系为
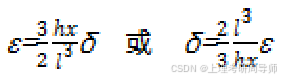
式中 l、h——梁的长度、厚度; x——从自由端到贴片处的距离。
若按图9-2所示的方法贴片和接桥,则位移δ与应变仪读数的关系为
对于等强度梁,则有
这种测量方法一般只用于小位移δ<250μm的情况。其主要特点是结构牢固、性能稳定、可靠,有较高的测量精度和良好的线性关系,与之配用的测量电路和仪器也较为成熟。
悬臂梁一般用弹簧钢或磷铜片制成。梁的尺寸应按所测的位移来选择。给定ε(一般取500~1000),根据所测位移量δ,就可由式(9-1)或式(9-2) 选择合适的l与h。为了尽量减小对被测对象的影响,设计弹性梁时,应根据具体情况,将变形梁的刚度限制在一定的范围。
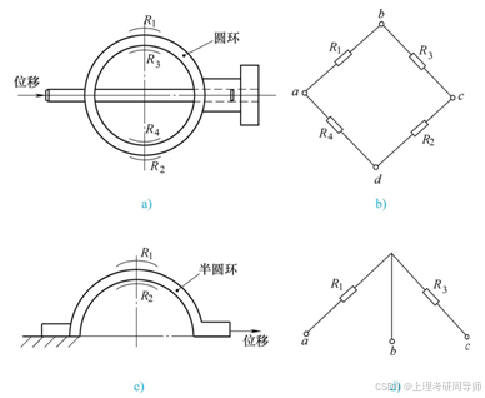
图9-3所示的圆环或半圆环弹性元件,它在被测位移δ的作用下,会产生弯曲应力和应变,其应变值与位移成正比。圆环的贴片和接桥如图9-3a、b所示。半圆环的贴片、接桥如图9-3c、d所示。
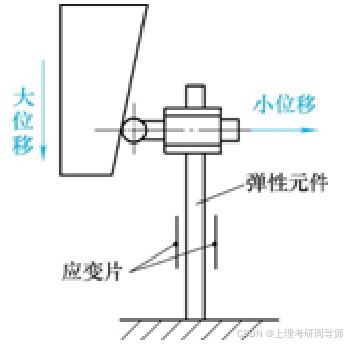
由于这种方法直接测量的位移量较小,为了扩大其量程,可通过一些装置将小位移进行变换。图9-4所示就是用一斜面将小位移变换成大位移的装置。
9.2.3 差动变压器式位移传感器
图9-5示出了差动变压器的结构和接线情况,其基本工作原理在前文中已有说明,现就其输出再做如下分析。
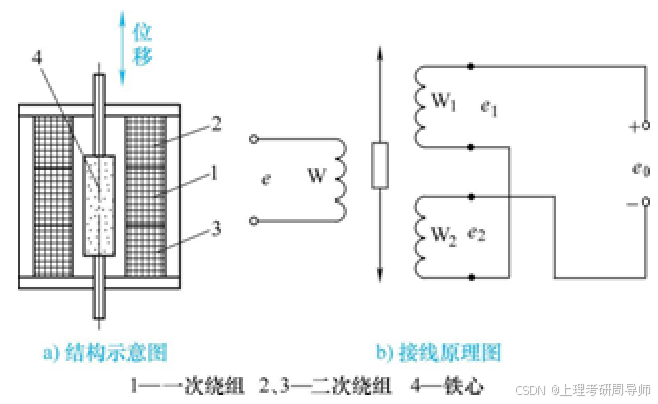
设一次侧、二次侧的互感系数分别为M1、M2,因互感M是和铁心的搭接长度Δl成正比的,则两个二次绕组的感应电动势可表示为
e1=K1eΔl1 e2=K2eΔl2
式中 K1、K2——比例系数; Δl1、Δl2——铁心与两个二次绕组搭接长度的变化量;
e—— 一次绕组交流电源。
由于结构的对称性,有K1=K2,Δl1=-Δl2。这样,W1、W2两线圈反相串联后的总输出电压可表示为 e0=e1-e2=2KeΔl(9-3)
结构一旦确定,则式(9-3)中的2K为一常数,输出信号e0是一个交流信号,其幅值与位移Δl成正比,而频率等于交流电源e的频率(当Δl是常量时)或与之有一定的关系。
显然,e0是调频输出,载波是e,调制信号是位移变化量Δl。差动变压器也是一种调制器。对于这样一个调制信号,在后续的测量环节中一般要设置一个典型的测量电路——相敏检测电路,目的是既能检测位移的大小,又能分辨位移的方向。
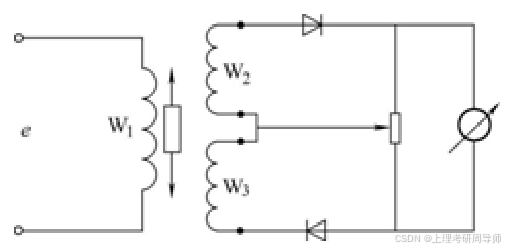
差动变压器式位移传感器的测量系统及其组成中各环节的工作原理可参阅本书的有关内容。下面再介绍一种可与差动变压器配用的测量电路——差动整流电路。
如图9-6所示,差动整流电路与相敏检测电路的功能基本相同,虽然检波效率低,但因其测量线路简单,故用得也很多,差动变压器的最后输出一般可用示波器直接显示。由于示波器振子的内阻都很小,当差动变压器的测量电路是电压输出时,振子回路应接入电阻,以保证线性。
国产的差动变压器式位移传感器已有多种,其测量位移范围有:0~±5mm,0~10mm,…, 0~300mm等。
差动变压器式位移测量系统具有精度较高、性能稳定、线性范围大、输出大、使用方便等优点。由于可动铁心具有一定的质量,系统的动态特性较差。
9.2.4 光电脉冲式位移传感器
光电脉冲式位移传感器实际上是一个位移-数字编码器,工作时可将机械位移转换成定数量的电脉冲信号输出,其工作原理如图9-7所示。
图9-7a是测量角位移的透射式光电脉冲转换器。圆盘1与被测轴2一起转动时,照射到光敏二极管4上的光线就会时有时无,通过光敏二极管的光电效应以及测量电路的变换就输出电脉冲;电脉冲的数目与光线的通断次数成正比,根据脉冲数目就可测出被测轴的转角。
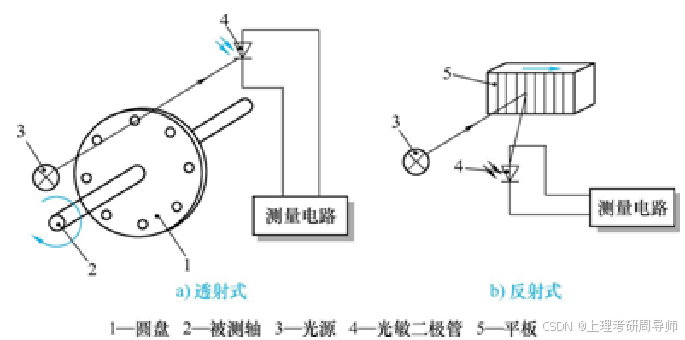
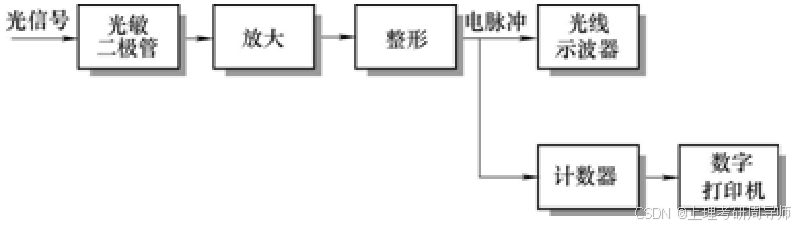
图9-7b是测量线位移的反射式光电脉冲转换器。工作原理与透射式的基本相同,不同点仅在于照射光敏二极管的光是靠反射光。根据平板5上画有黑白相间的等距反光条带,当平板与被测件一起运动时,反射到光敏二极管4上的光线就会时有时无,同理就可输出电脉冲信号,其电脉冲数目与位移成正比。光电脉冲式位移传感器的后续测量电路和显示记录装置如图9-8的框图所示。输出的电脉冲信号用计数器和数字打印机打印(计算机处理和显示)。
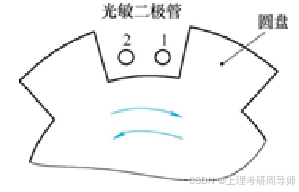
用上述方法,无法判断位移的正负方向,在需要判断方向的场合,需要多加一个光敏二极管和一套测量电路。两光敏二极管的装设位置如图9-9所示。采用两个光敏二极管后,当圆盘顺时针转动时,光敏二极管2比1先感光;当逆时针转动时,光敏二极管1比2先感光;我们可通过光敏二极管感光先后次序的不同,来判断其转动方向。所以它的测量电路有两路,经逻辑电路对信号做出比较判断后给出方向信号,其测量线路框图如图9-10所示。
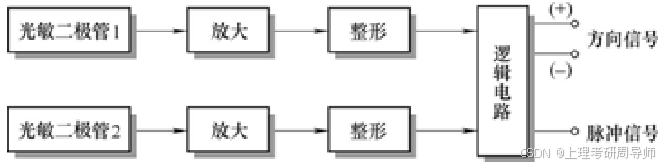
其输出信号有方向信号与脉冲信号。当用示波器记录时,可用两个或三个振子分别记录方向信号和脉冲信号,处理数据时进行加减处理,才得真实位移。用计数器计数时,要用可逆计数器、方向信号(+)、(-)控制计数器的“加”、“减”法运算、脉冲信号作为计数器的计数脉冲,计数器所记录的脉冲数就与实际位移成正比。如再增加脉冲数-位移转换电路,则可制成各种数字式仪表,在LED等显示器上直接读出待测位移量。
这种测量方法的两个显著特征是测量的非接触和信号的数字化。由此而带出来的优点是不影响被测对象,易于信号的传输和处理,测量装置的安装、使用方便,测量范围大,长度可达数米,角度可在360°范围内进行测量等。当采用普通光源和器件时,分辨率较低,因此这种测量方法常用于精度要求一般的大位移测量和简易数控机械系统中。
9.3 位移传感器的应用
9.3.1 回转轴径向运动误差的测量
回转轴运动误差是指在回转过程中回转轴线偏离理想位置而出现的附加运动。回转轴运动误差的测量,在机械工程的许多行业中都是很重要的。无论对于精密机床主轴的运动精确度,还是对于大型、高速机组(例如汽轮机-发电机组)的安全运行都有重要意义。
运动误差是回转轴上任何一点发生与轴线平行的移动和在垂直于轴线的平面内的移动。前一种移动称为该点的端面运动误差,后一种移动称为该点的径向运动误差。
端面运动误差因测量点所在半径位置不同而异,径向运动误差则因测量点所在的轴向位置不同而异。所以在讨论运动误差时,应指明测量点的位置。
下面介绍径向运动误差的常用测量方法。
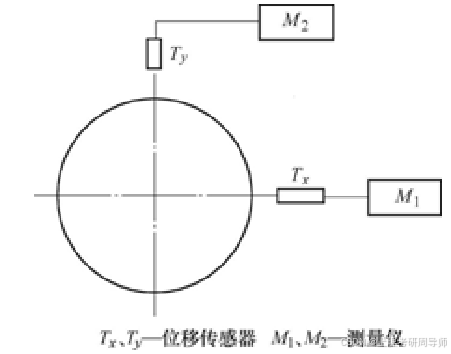
测量一根通用的回转轴的径向运动误差时,可将参考坐标选在轴承支承孔上。这时运动误差所表示的是回转过程中回转轴线对于支承孔的相对位移,它主要反映轴承的回转质量。任意径向截面上的径向误差运动可采用置于x、y方向的两只位移传感器来分别检测径向运动误差在x、y方向的分量。在任何时刻两分量的矢量和就是该时刻径向运动误差矢量。这种测量方式称为双向测量法(见图9-11)。
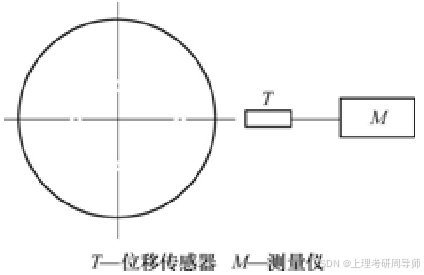
由于种种原因,有时不必测量总的径向运动误差,而只需测量它在某个方向上的分量(例如分析机床主轴的运动误差对加工形状的影响就属于这种情况),则可将一只传感器置于该方向来检测。这种方式称为单向测量法(见图9-12)。
在测量时,两种方法都必须利用基准面来“体现”回转轴线。通常是选用具有高圆度的圆球或圆环来作为基准面。直接采用回转轴上的某一回转表面来作为基准面虽然可行,但由于该表面的形状误差不易满足测量要求,测量精度较差。
实际上,传感器所检测到的位移信号是很复杂的。现以双向测量法为例(见图9-13)来说明其复杂性。设O0为理想回转中心,Om为基准球的几何中心,Or为瞬时回转中心,e为基准球的安装偏心,θ为转角,并令e与x轴平行时θ=0,r(θ)为径向运动误差。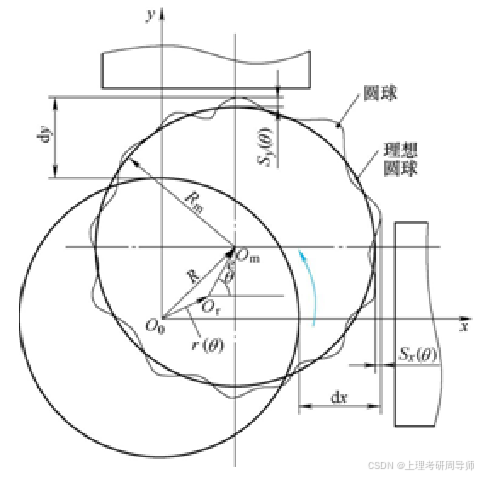
若基准球半径Rm远远大于偏心e和径向运动误差r(θ),则两传感器检测到的位移信号dx和dy分别为
dx=ecosθ+rx(θ)+Sx(θ)(9-4)
dy=esinθ+ry(θ)+Sy(θ)(9-5)
等号右侧第一、二项分别为偏心e和运动误差r(θ)在x、y方向上的投影,而第三项则为基准球上相差90°的两对应点处的形状误差。 由此可见:
1)在一般情况下dx+dy=r(θ),而只有当Sx(θ)和Sy(θ)均趋于零或已确知,由dx和dy才能确定r(θ)。因此,如何消除或分离偏心e和基准球的形状误差S就成为研究测量方法的重要任务。目前常采用形状误差远小于回转运动误差的圆球来作为基准球,力求减小它对测量结果的影响。当圆球形状误差和运动误差大小属于同一数量级时,则必须采用误差分离技术来消除其影响。
2)在圆球形状误差可忽略的情况下,dx和dy是圆球中心的位移在x、y两方向上的分量。换言之,由于偏心e的存在,由dx、dy可以确定的是圆球几何中心的轨迹而不是回转轴心的轨迹。实际上,在同一根轴上,以相同条件运行(而r(θ)应一样),由于偏心e的大小和方位不同,测量的dx和dy亦不同。为了尽量减小偏心对dx、dy的影响,使得测量结果更能真实地反映r(θ),就必须尽量减小或消除e值。如果这样做有困难,那么只有在同一偏心大小和方位的条件下,测定的结果彼此间才有可比性。
3)通常通过适当的机械装置和精细调整来减小安装偏心,或采用滤波法来减弱偏心的影响。
9.3.2 物位测量
在生产过程中经常遇到大量的固体和液体物料,存放在容器中或堆放在场地上,并占有一定的高度,此高度可能是随时间变化的。对此高度的测量称为物位测量。液位测量、固体的料位测量、两种液体或液体与固体间界面位置的测量均属于物位测量。物位测量多是将物位转换成位移量来进行的,这也是位移测量应用较多的一个方面。
多种不同转换原理的位移传感器可用于物位测量。下面介绍其中的两种。
1. 沉筒式液位变送器
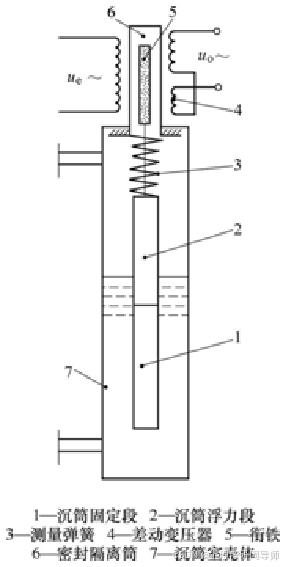
带有差动变压器的沉筒式液位变送器(见图9-14)的沉筒由固定段1和浮力段2两部分组成。调换浮力段可使变送器适应于不同的介质和量程。沉筒所反映的浮力变化(即液位变化)通过测量弹簧3线性地转换为衔铁5的位移。衔铁位移由差动变压器4转换成与之成正比的输出电压uo,因此输出反映了液位的变化。
浮力段的长度和质量,是根据液位变化满量程时所受浮力变化与其质量相等而算出的。因此在现场校准时,只需在接上浮力段时,使弹簧3和衔铁5占有相当于液位为零的位置;取下浮力段时,弹簧及衔铁占有相当于液位为满量程的位置即可。它不必用液位来校准和进行计算,因而使用比较方便,但这只适用于某一特定的介质和压力的情况。
2. 电阻式液位计
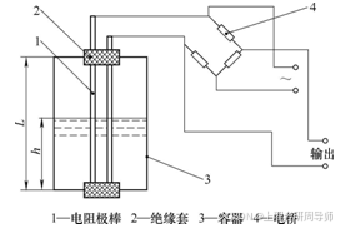
电阻式液位计(见图9-15)由两根大电阻率的极棒1组成,两根极棒的材料和截面完全一样,两端拉紧,并用绝缘套2与容器3绝缘。假如被测的是导电介质,因其电阻率很小,可忽略不计,再略去连接导线电阻,则整个传感器的电阻R为
式中 ρ——极棒的电阻率; A——极棒横截面积;
L'——极棒全长; h——被测液面高度。
R=K1-K2h(9-7)
式中,K1、K2都是常量,可以通过测量R值的变化来得知液位高度h的变化。电阻值R可以用电桥4(或其他测量电路)测得。温度变化所引起的误差可以在电路中进行补偿。但这种液位计的最大缺点是电极表面如发生生锈、表面极化、结垢、腐蚀等情况,都会引起表面接触电阻的变化,从而直接引入测量误差。
思考题与习题
9-1 简述差动变压器的工作原理。
9-2 电容式位移传感器有几种类型?它们是如何实现位移测量的?主要特点是什么?
9-3 图9-16给出了某电位器式位移传感器的检测电路。Ui=12V,R0=10kΩ,AB为线性电位计,总长度为150mm,总电阻为30kΩ,C点为电刷位置。问:
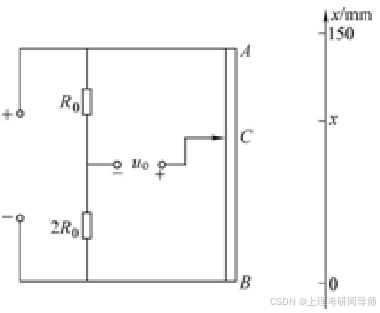
1)输出电压Uo=0V时,位移x=?
2)当位移x的变化范围在10~140mm时,输出电压Uo的范围是多少? 9-4 图9-17给出了一差动变极距型电容式传感器的结构示意图及其电桥检测电路。ui=Umsinωt为激励电压。试建立输出电压uo与被测位移Δδ的关系,并说明该检测方案的特点。 9-5 某位移测量装置采用了两个相同的线性电位计。电位计的总电阻为R0,总工作行程为L0。当被测位移变化时,带动这两个电位计一起滑动(见图9-18,虚线表示电刷的机械臂),若采用电桥检测方式,电桥的激励电压为Ui。
1)设计电桥的连接方式。
2)被测位移的测量范围为0~L0时,电桥的输出电压范围是多少?
我在上面讲课哦
资料仅供学习使用
如有错误欢迎留言交流
上理考研周导师的其他专栏:
上理考研周导师了解更多


















 3804
3804

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











