






适用于Matlab2019a和b版本
速度环模块儿分别用PI和MTPA控制策略
基于MRAS(模型参考自适应法)的无位置传感器控制系统设计。
ID:38120675795764360
兜兜里没糖了

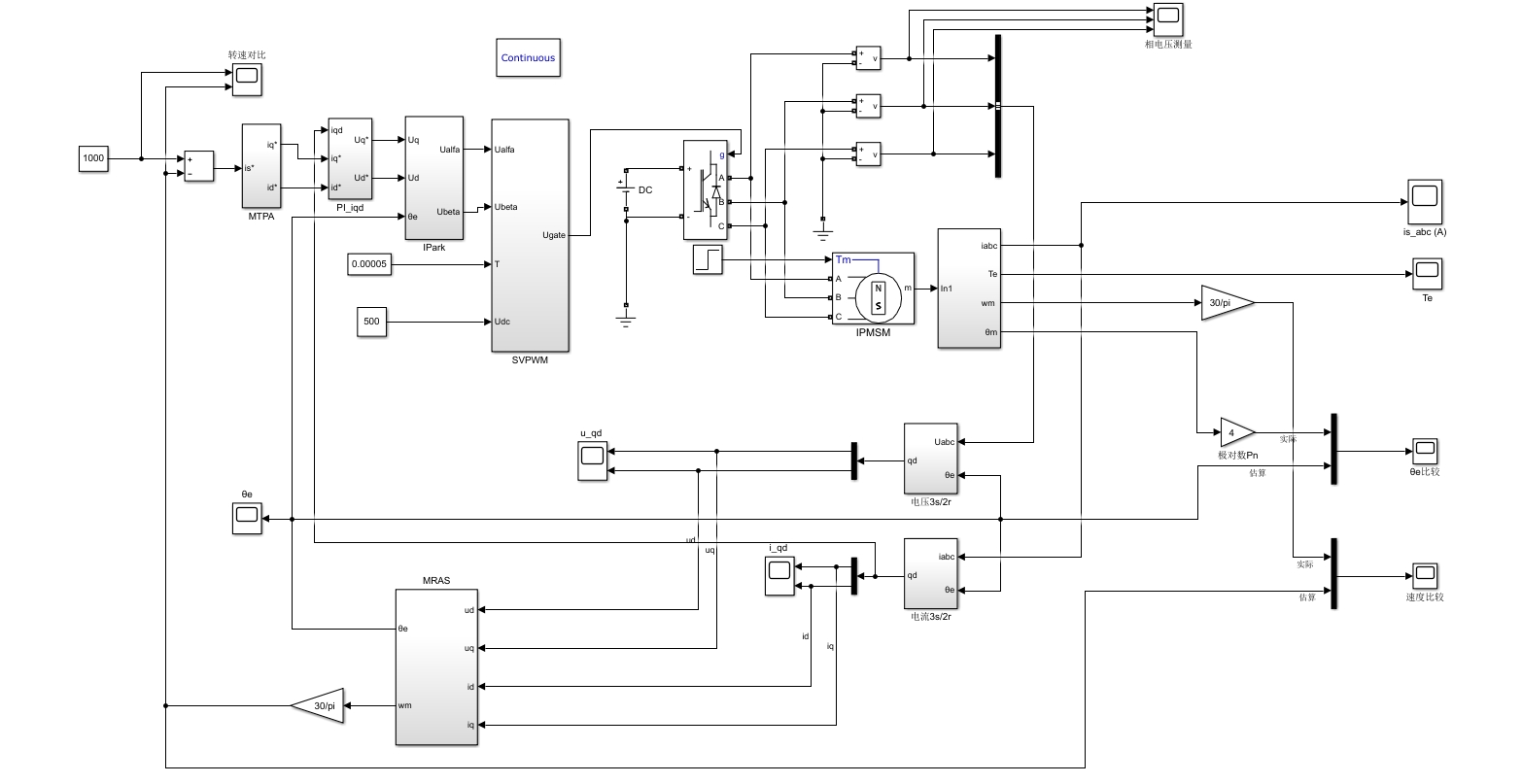
在Matlab2019a和b版本中,速度环模块儿的控制策略可以使用PI(Proportional-Integral)和MTPA(Maximum Torque per Ampere)来实现。同时,可以基于MRAS(Model Reference Adaptive System,模型参考自适应法)的技术设计一个无位置传感器的控制系统。
首先,让我们来讨论速度环模块儿的控制策略。速度环模块儿是电机控制系统中的重要组成部分,用于调节电机的转速。在Matlab2019a和b版本中,我们可以使用PI和MTPA两种控制策略来实现速度环模块儿。
PI控制策略是一种经典的控制方法,通过比较实际的速度与期望的速度之间的差异,根据比例项和积分项来调节控制信号,以达到准确控制转速的目的。这种方法简单直观,容易理解和实现,在许多实际应用中得到了广泛应用。
另一种控制策略是MTPA,它是一种更高级的控制方法。MTPA控制策略基于电机的电流特性,通过调节电机的转矩和电流来控制转速。它可以实现更高的电机效率和性能,并且在电机的负载情况变化较大时表现出更好的鲁棒性。
在实际应用中,选择适合的控制策略取决于具体的需求和应用场景。如果对控制精度要求较高,可以选择PI控制策略;如果对电机效率和性能要求较高,并且负载情况变化较大,可以选择MTPA控制策略。
除了速度环模块儿的控制策略,我们还可以基于MRAS的技术设计一个无位置传感器的控制系统。传统的电机控制系统通常需要使用位置传感器来测量电机的转子位置,以实现准确的控制。然而,位置传感器的成本较高,安装复杂,并且容易受到环境干扰。
MRAS是一种基于模型参考自适应法的技术,可以通过测量其他传感器信号来估计电机转子的位置。它通过建立电机的数学模型,并根据模型和实际测量值之间的差异来调整估计值,从而实现无位置传感器的控制。
使用MRAS技术设计无位置传感器的控制系统可以降低成本,并简化安装步骤。然而,MRAS技术也存在一些挑战,比如模型不准确和噪声干扰等。因此,在实际应用中需要根据具体情况进行综合考虑,并对系统进行适当的校准和调整。
综上所述,Matlab2019a和b版本中的速度环模块儿可以采用PI和MTPA两种控制策略,并且可以基于MRAS技术设计一个无位置传感器的控制系统。选择合适的控制策略和技术取决于具体的需求和应用场景。通过合理的设计和调整,可以实现准确、高效和鲁棒的电机控制。
相关的代码,程序地址如下:http://matup.cn/675795764360.html
















 172
172











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









