






BLDC转速控制仿真,BLDC双环控制,无刷直流电机速度控制仿真。
外环转速PI控制,内环电流滞环控制或bang-bang控制,带霍尔传感器,采用六步换相法驱动。
只有仿真,没有代码。
ID:2724675793508700
UVWY仿真编程

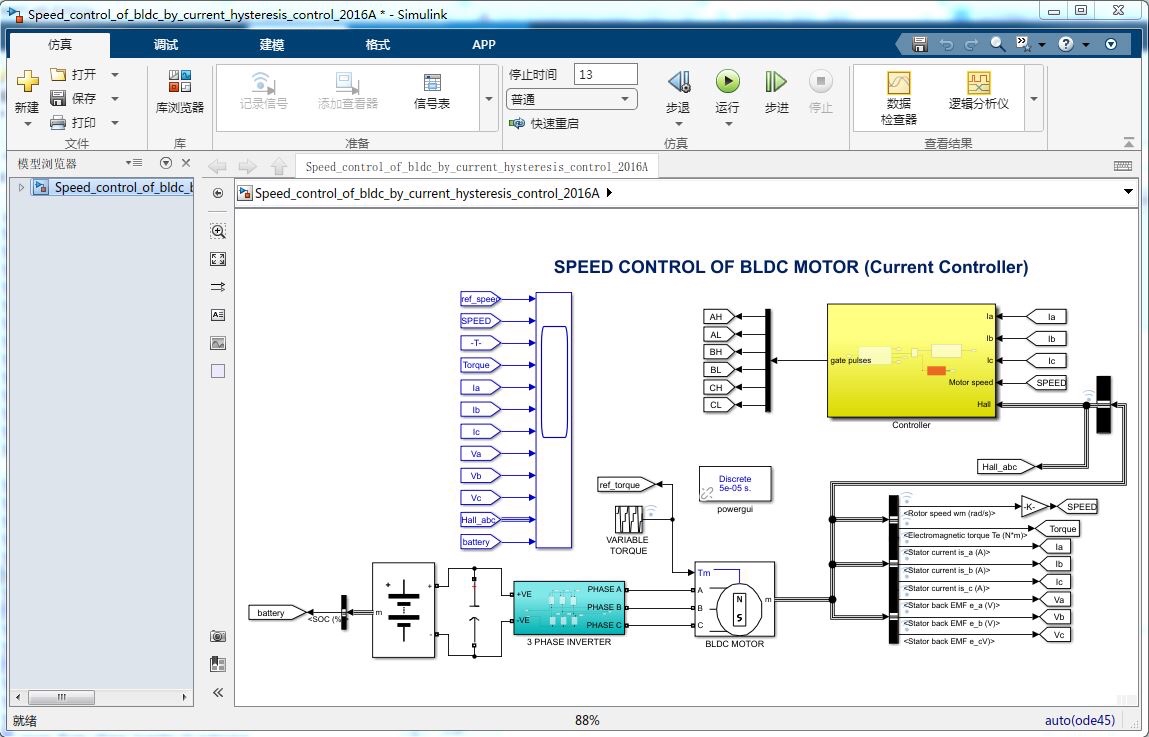
在现代电气驱动系统中,无刷直流电机(Brushless DC Motor, BLDC)被广泛应用于各种领域,因其高效、可靠、低噪音等优势备受推崇。为了实现对BLDC电机的精确控制,研究者们提出了多种控制算法。其中,BLDC转速控制仿真是一种十分重要且常见的研究方向。
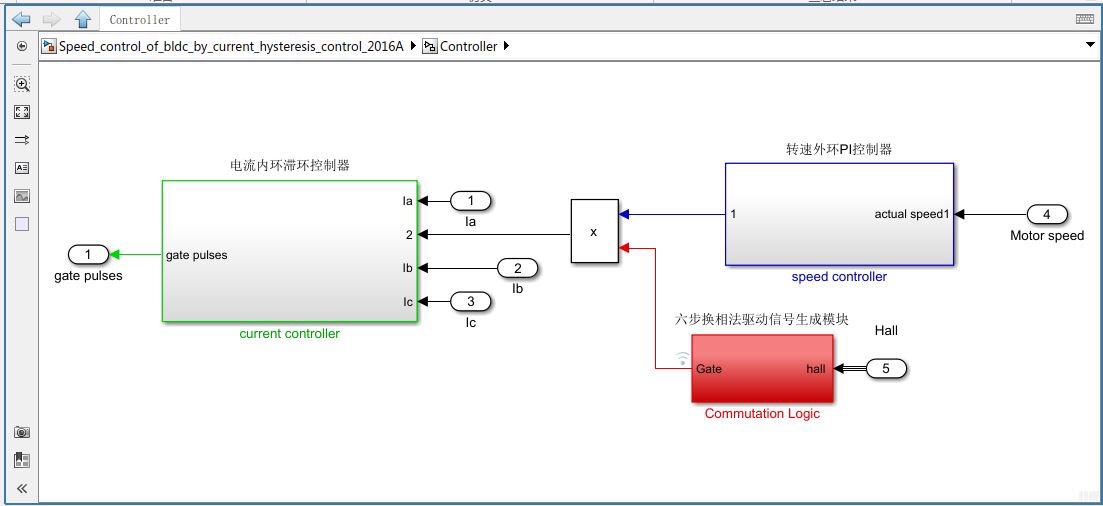
在BLDC电机的控制过程中,外环转速PI控制和内环电流滞环控制或bang-bang控制是两种常用且效果较好的控制方式。BLDC电机通常采用带霍尔传感器的六步换相法进行驱动。通过将转速控制和电流控制相结合,可以实现对BLDC电机的精确调节和高效运行。
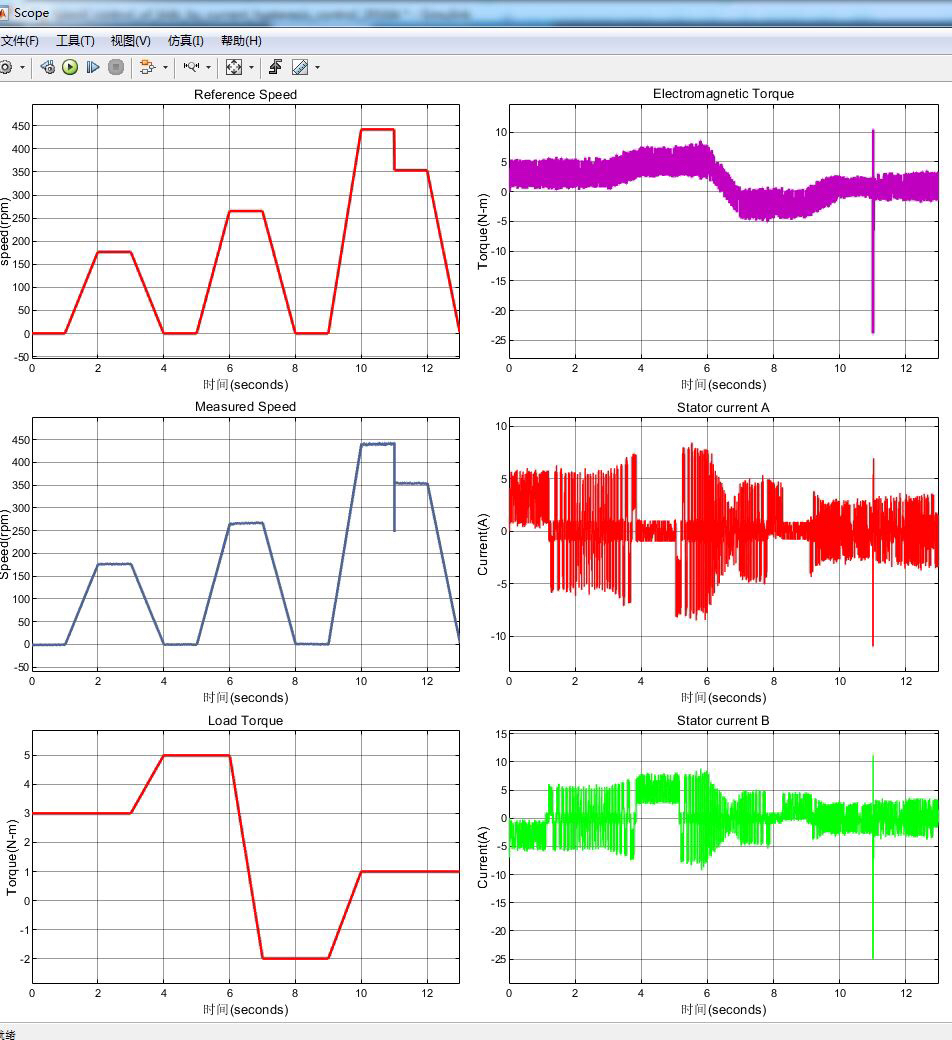
在BLDC转速控制仿真中,外环转速PI控制是整个控制系统的核心部分。通过测量电机转速与期望转速之间的误差,并根据PI控制算法进行调节,可以实现对电机转速的闭环控制。PI控制算法是一种常用的比例积分控制器,通过比例和积分项来调节控制系统的输出,使其与期望值更加接近。
而内环电流控制是为了进一步提高控制效果而引入的一种控制方式。内环控制可采用电流滞环控制或bang-bang控制。电流滞环控制是通过测量电机电流与期望电流之间的误差,并根据滞环控制算法进行调节,使电机电流能够更加接近期望值。而bang-bang控制则是通过将电机电流与期望电流进行比较,以判断是否需要进行换向操作,从而实现电流的闭环控制。
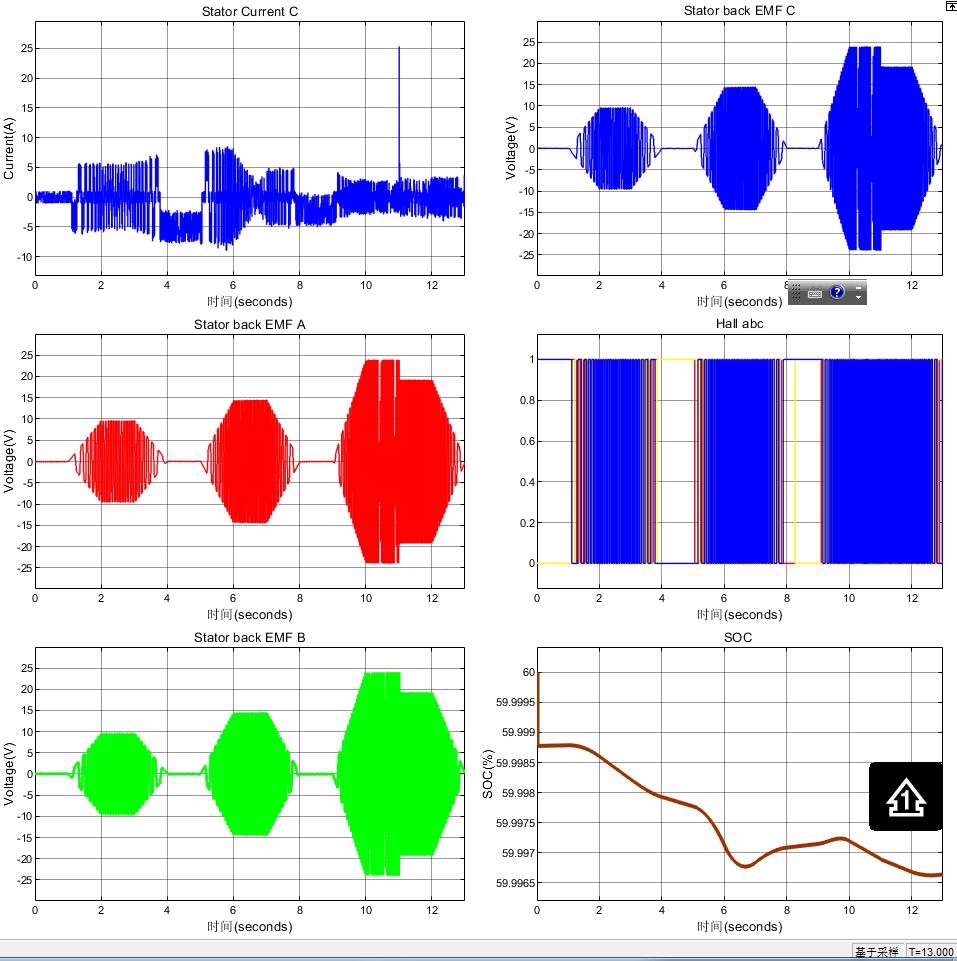
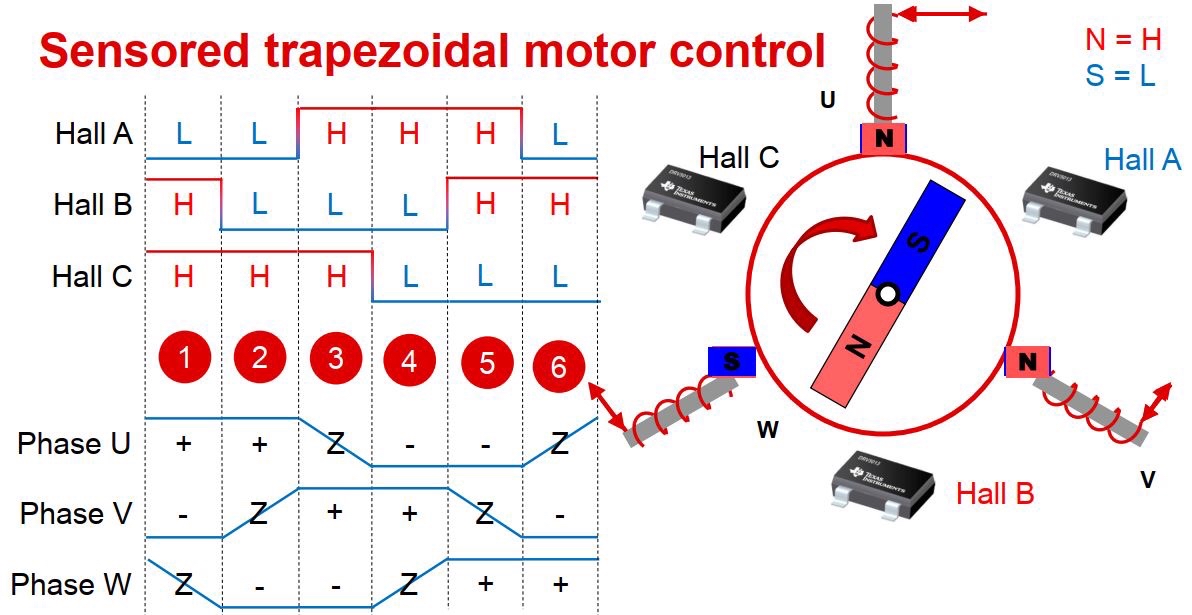
在BLDC转速控制仿真中,带霍尔传感器的六步换相法是一种常用的驱动方式。六步换相法通过对电机的相序进行控制,实现对电机转速和方向的调节。具体来说,六步换相法分为两个阶段:换相和电流调节。在换相阶段,根据电机的转子位置信息,判断应该打开哪些相端口,从而使电流流过适当的相线。在电流调节阶段,通过对电流进行调节,使其能够接近期望值,从而实现BLDC电机的精确控制。
需要注意的是,BLDC转速控制仿真仅仅是对BLDC电机的控制过程进行仿真,而不涉及具体的代码实现。因此,在进行仿真研究时,研究者们可以基于理论模型,通过仿真软件进行电路设计和控制算法的验证,从而得到BLDC电机的控制效果。
综上所述,BLDC转速控制仿真是对无刷直流电机控制过程进行研究的一种重要手段。通过外环转速PI控制和内环电流滞环控制或bang-bang控制,结合带霍尔传感器的六步换相法驱动,可以实现对BLDC电机的精确控制。在进行仿真研究时,研究者们可以通过仿真软件进行电路设计和控制算法的验证,以得到BLDC电机的优化控制策略。这将有助于提高BLDC电机的性能和运行效率,推动其在各领域的应用。
相关的代码,程序地址如下:http://matup.cn/675793508700.html
















 893
893

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









