







一. 线段裁剪
Cohen-Sutherland算法
Cohen-Sutherland是最早最流行的算法。
- 核心思想:通过编码测试来减少计算交点的次数。(编码算法)
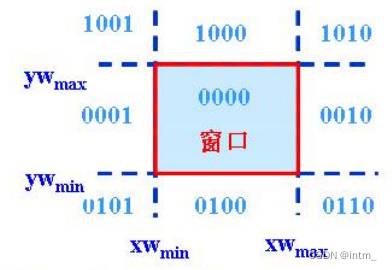
1. 区域码:
线段端点以区域赋值以四位二进制码。
- 编码顺序:四位从右到左分别为:左边界、右边界、下边界、上边界。
- 编码值:落在相应位置为1,否则为0
- 如图:
- 求区域码:可以通过将坐标与四个边界比较,也可以通过做减法看符号位。
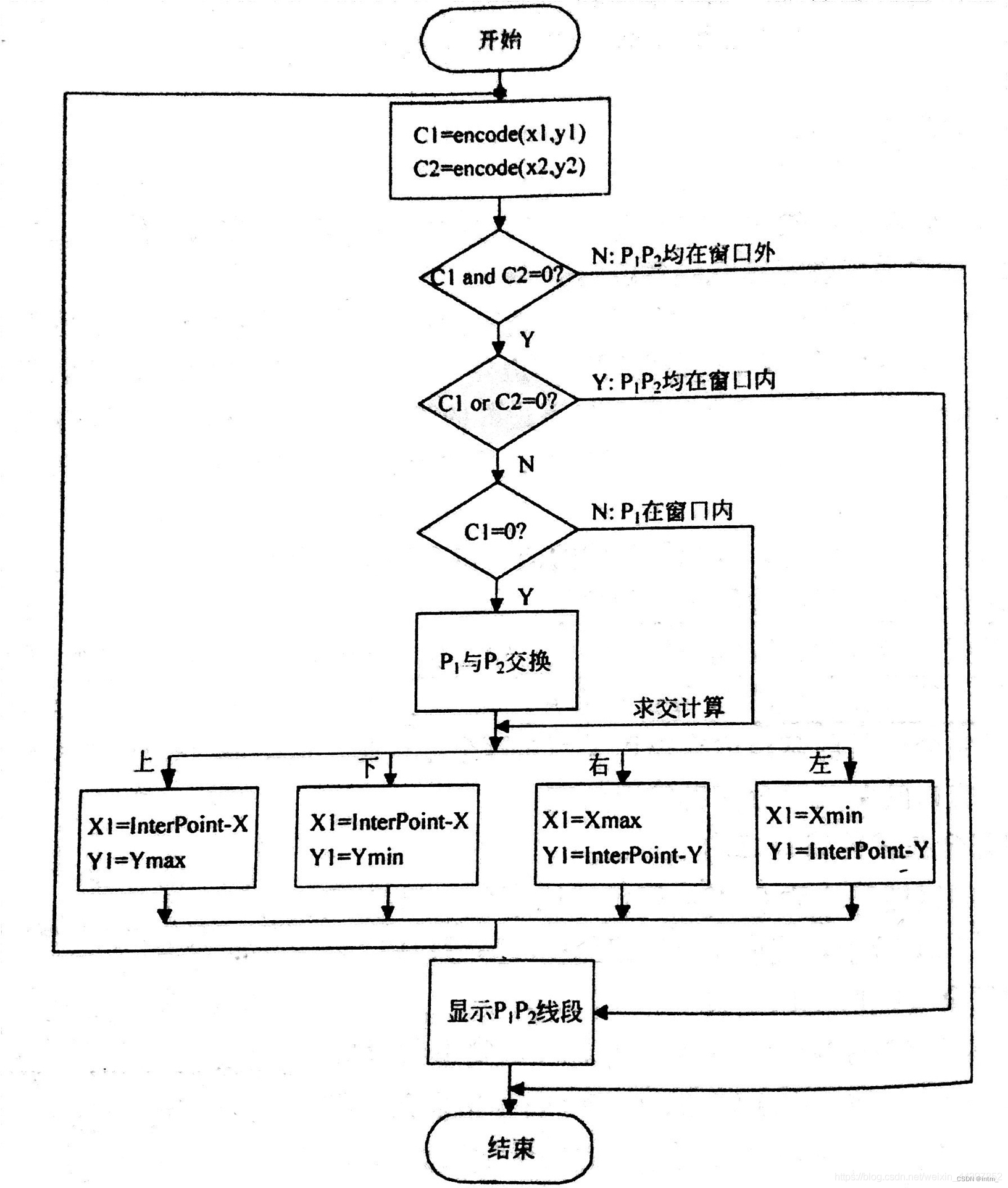
2. 算法流程及代码
-
算法流程:
-
线段位置一共有3种情况:完全在窗口内、完全在窗口外、部分在窗口内
-
根据线段端点的区域码快速判断:
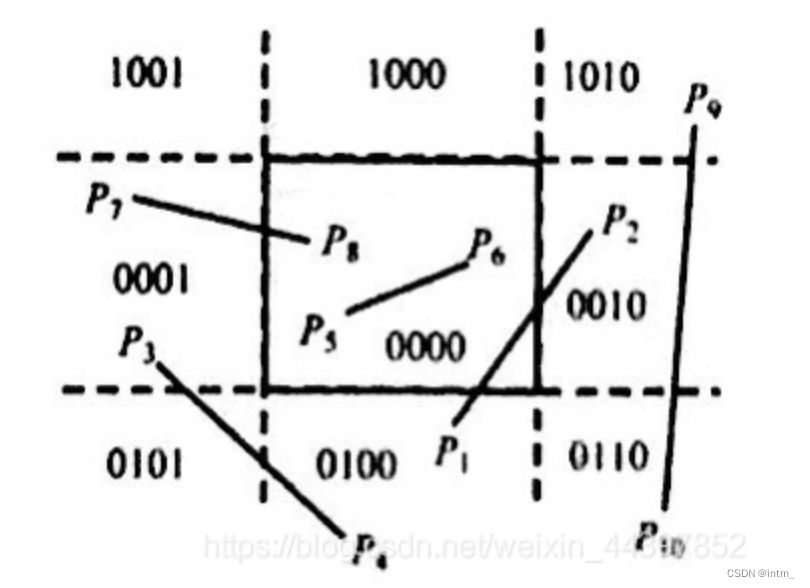
- C1 | C2=0: 表示两个端点区域码都为0000,线段在窗口内,直接返回。(如P5P6)
- C1 & C2 !=0: 表示两个 端点区域码有同样的位置都为1,完全在窗口外,全部舍弃,返回。(如P9P10)
- 不能确定完全在窗口内外的线段–>求交(如P1P2、P3P4、P7P8)
- 方法是:首先对线段外端点(落在窗口外的点)与一条裁剪边界比较来确定需要裁剪多少线段;然后,将线段的剩下部分与其他裁剪边界对比,直到该直线完全落在窗口内或者被舍弃。
- 要点:始终保证P1为落在窗口外的点,将P1与窗口边界求交。
-
代码;
def Cohen-Sutherland(p_list, x_min, y_min, x_max, y_max): """线段裁剪 :param p_list: (list of list of int: [[x0, y0], [x1, y1]]) 线段的起点和终点坐标 :param x_min: 裁剪窗口左上角x坐标 :param y_min: 裁剪窗口左上角y坐标 :param x_max: 裁剪窗口右下角x坐标 :param y_max: 裁剪窗口右下角y坐标 :return: (list of list of int: [[x_0, y_0], [x_1, y_1]]) 裁剪后线段的起点和终点坐标 """ result = [] if y_min > y_max: y_min, y_max = y_max, y_min x0, y0 = p_list[0] x1, y1 = p_list[1] while 1: code0 = 0 #1_left, 2_right, 4_down, 8_up code1 = 0 #1_left, 2_right, 4_down, 8_up #calc code0 if x0 < x_min: code0 += 1 elif x0 > x_max: code0 += 2 if y0 < y_min: code0 += 4 elif y0 > y_max: code0 += 8 #calc code1 if x1 < x_min: code1 += 1 elif x1 > x_max: code1 += 2 if y1 < y_min: code1 += 4 elif y1 > y_max: code1 += 8 #inside if (code0 | code1) == 0: result = [[x0, y0], [x1, y1]] break #outside elif (code0 & code1) != 0: result.append([0,0]) result.append([0,0]) break #otherwise else: if code0 == 0: x0, x1 = x1, x0 y0, y1 = y1, y0 code0, code1 = code1, code0 #1_left, 2_right, 4_down, 8_up if (code0 & 1): y0 = int(y0 + ((x_min-x0) * (y0-y1)/(x0-x1)) + 0.5) x0 = x_min if (code0 & 2): y0 = int(y0 + ((x_max-x0) * (y0-y1)/(x0-x1)) + 0.5) x0 = x_max if (code0 & 4): x0 = int(x0 + ((y_min-y0) * (x0-x1)/(y0-y1)) + 0.5) y0 = y_min if (code0 & 8): x0 = int(x0 + ((y_max-y0) * (x0-x1)/(y0-y1)) + 0.5) y0 = y_max return result
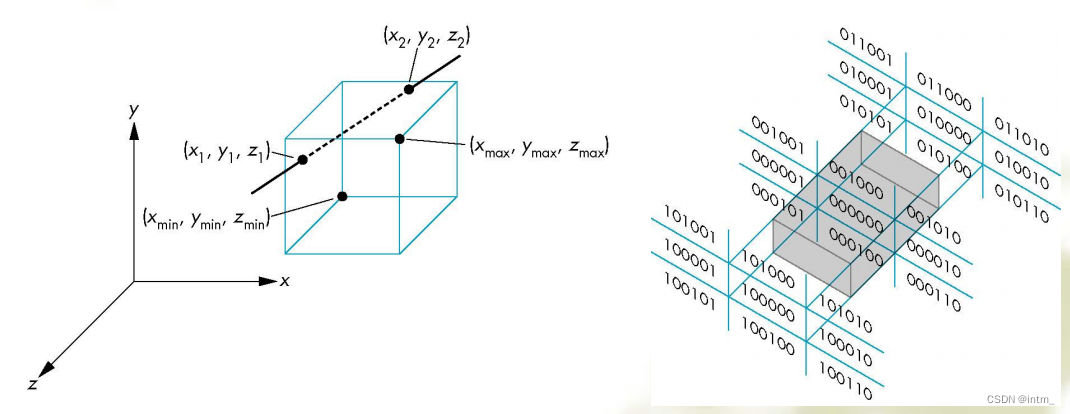
3. 三维空间中的cohen-Sutherland算法
- 利用6位区域码
- 必要时利用平面进行线段裁剪
4. 拓展:将Cohen-Sutherland改进为外裁剪算法
上述Cohen-Sutherland算法主要用于进行内裁剪,即保留位于窗口内的二维图形,那么如果想要进行外裁剪,即保留窗口外的二维图形呢?
此处改进算法是我自己的思考,不能保证完全正确:
- 直线与窗口的位置关系可以分为4类:
- C1 | C2 =0: 即完全在窗口内(如P5P6),直接舍去
- C1 & C2 !=0: 存在相同的位置上都为1,即完全在窗口外且在同一区域(如P9P10),直接返回
- C1==0 | C2= =0: 即一个端点在窗口内(如P7P8),取在窗口外的端点与窗口求交(求交方法与Cohen-Sutherland一样),只需一次得到交点,交点与外端点之间的线段即所求,返回。
- 剩下的情况:两个端点都在窗口外且不在同一区域,无法确定(如P1P2、P3P4),取其中一个端点与窗口求交,得到交点与另一端点构成的线段,判断线段是否完全在窗口外,是则舍弃,返回;不是则变成第3种情况。
Liang-Barsky算法:
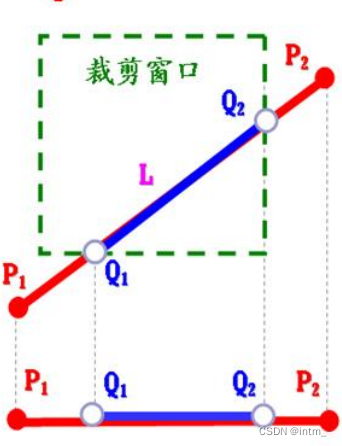
- 核心思想:将二维裁剪变成一维问题。
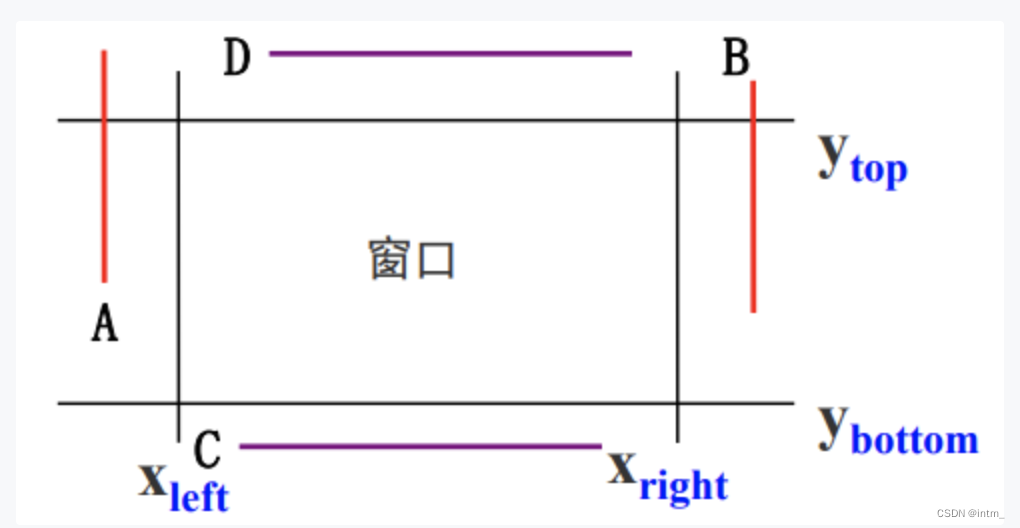
设P1P2所在的直线为L,直线或其延长线与窗口的交点为Q1Q2,Q1Q2称为诱导窗口,它是一维的。
P1P2关于二维窗口的裁剪结果与P1P2关于诱导窗口的裁剪结果是一致的。
1. 直线的参数方程
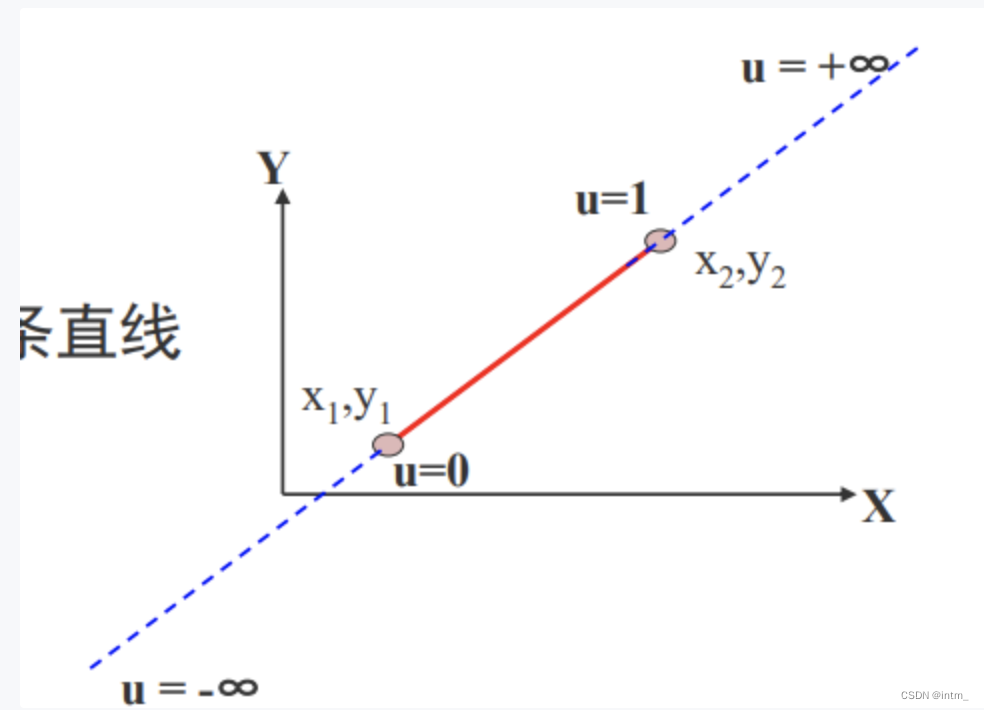

u=0时,为P1;u=1时,为P2。
2. 入边和出边
- 定义:
- 入边:直线由窗口外向窗口内移动时和窗口边界相交的边(左边界和下边界)。
- 出边:直线由窗口内向窗口外移动时和窗口边界相交的边(右边界和上边界)。
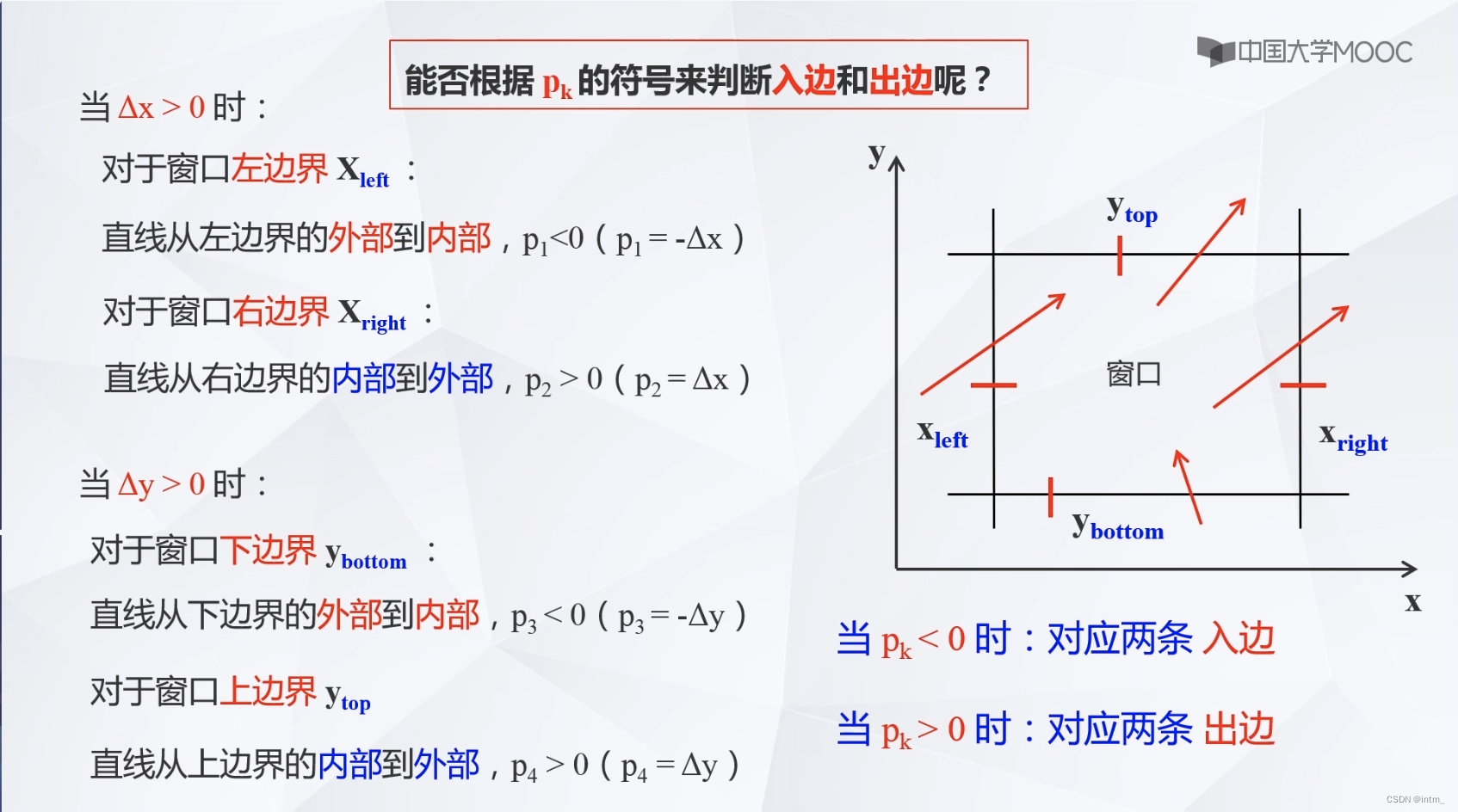
- 如何确定入边和出边
首先,将线段看作矢量(方向为P1->P2,即和参数方程一致),线段与窗口首先相交的两条边为入边,后相交的两条边为出边。
例如,如上图,当u从-∞到+∞遍历直线时,首先对裁剪窗口的两条边界直线(下边和左边)从外面向里面移动,再对裁剪窗口两条边界直线(上边和右边)从里面向外面移动。因此入边为窗口下边和左边,出边为窗口上边和右边。 - 由参数方程和不等式判断入边和出边
根据窗口边界,可以确定裁剪后的线段必定满足以下两行不等式:
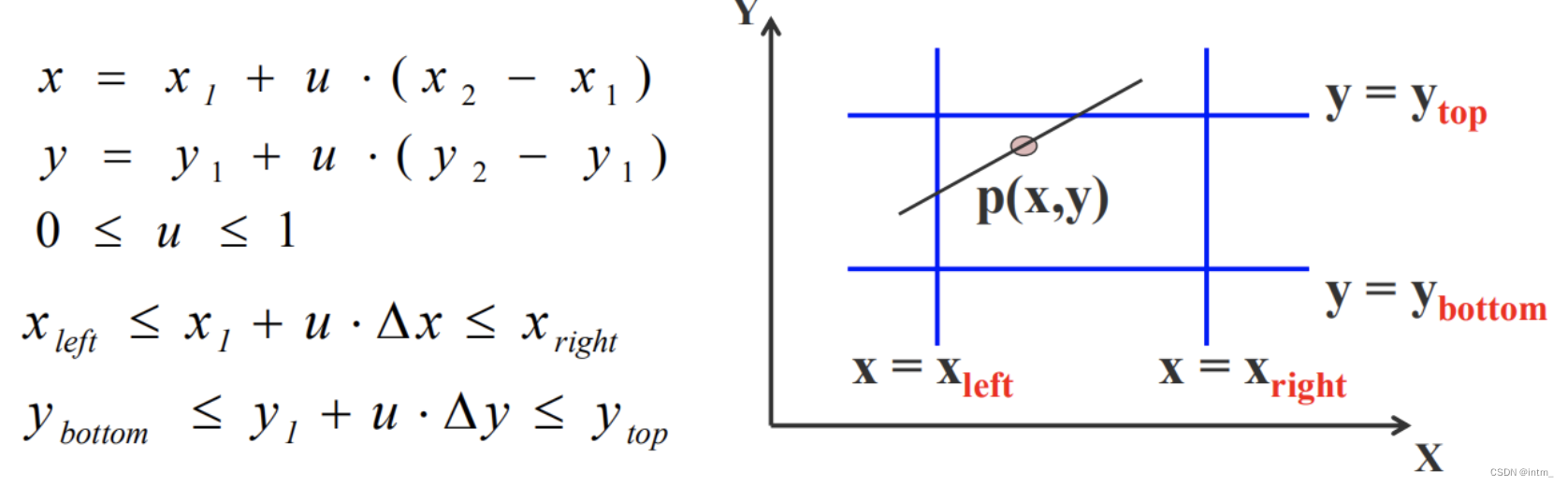
变形后可得:
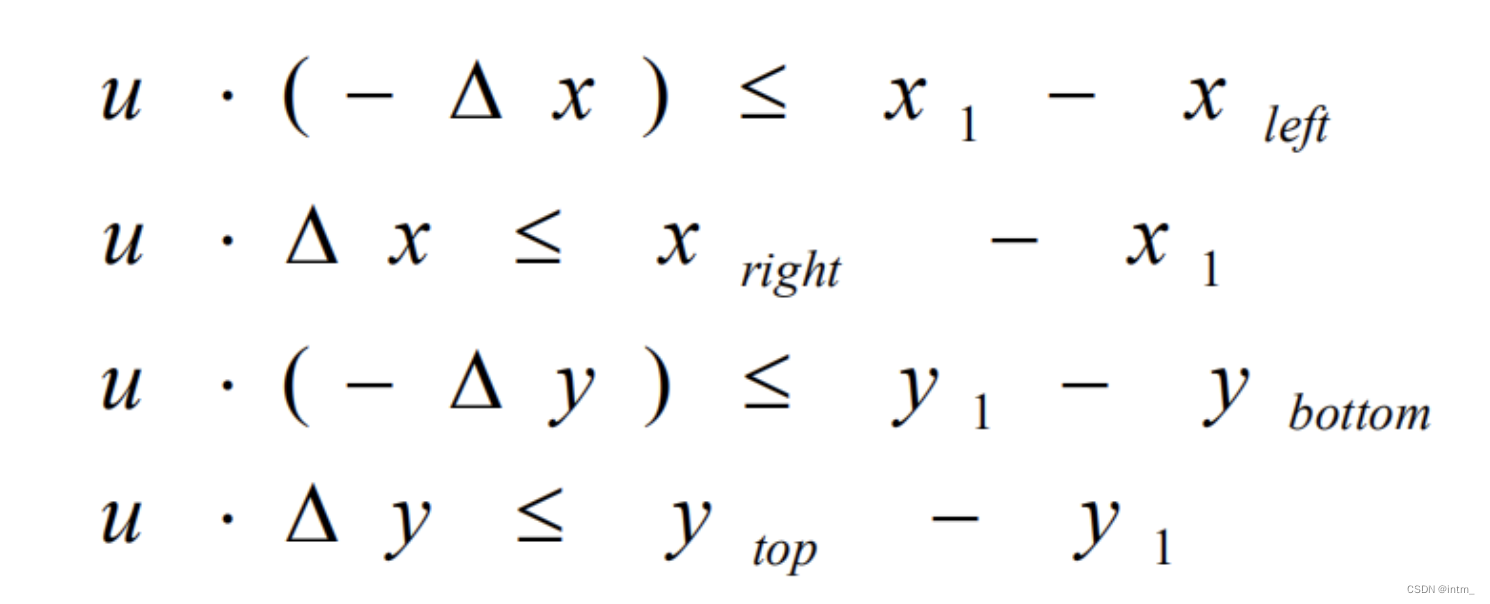
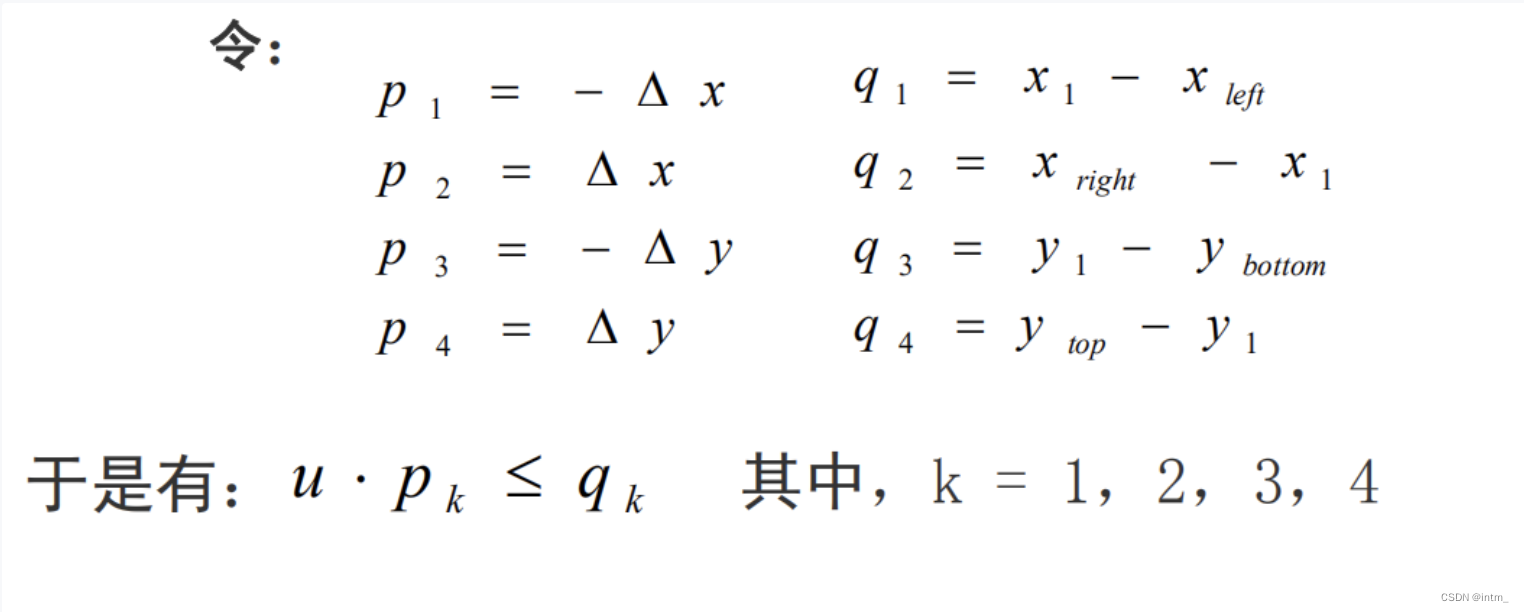
此时可以根据pk的正负来判断入边和出边:- pk<0: 入边,可得线段与入边的交点处对应的参数为u=pk/qk
- pk>0: 出边
- 若pk==0且qk<0:线段完全在窗口外,直接舍弃
3. 裁剪算法结果
设裁剪后线段的左右边界为u_min,u_max。
则
{
u
m
i
n
=
m
a
x
(
u
0
,
u
入边
1
,
u
入边
2
)
u
m
a
x
=
m
i
n
(
u
1
,
u
出边
1
,
u
出边
2
)
\begin{cases} u_{min}=max(u_0,u_{入边1},u_{入边2})\\u_{max}=min(u_1,u_{出边1},u_{出边2}) \end{cases}
{umin=max(u0,u入边1,u入边2)umax=min(u1,u出边1,u出边2)
若u_min>u_max,则直线段在窗口外,直接舍弃
若u_min<=u_max,带回参数方程可得裁剪后线段的两个端点。
4. 代码实现
def Liang-Barsky(p_list, x_min, y_min, x_max, y_max):
"""线段裁剪
:param p_list: (list of list of int: [[x0, y0], [x1, y1]]) 线段的起点和终点坐标
:param x_min: 裁剪窗口左上角x坐标
:param y_min: 裁剪窗口左上角y坐标
:param x_max: 裁剪窗口右下角x坐标
:param y_max: 裁剪窗口右下角y坐标
:return: (list of list of int: [[x_0, y_0], [x_1, y_1]]) 裁剪后线段的起点和终点坐标
"""
result = []
if y_min > y_max:
y_min, y_max = y_max, y_min
x0, y0 = p_list[0]
x1, y1 = p_list[1]
p = [x0 - x1, x1 - x0, y0 - y1, y1 - y0]
q = [x0 - x_min, x_max - x0, y0 - y_min, y_max - y0]
u0, u1 = 0, 1
for i in range(4):
if p[i] < 0:
u0 = max(u0, q[i] / p[i])
elif p[i] > 0:
u1 = min(u1, q[i] / p[i])
elif (p[i] == 0 and q[i] < 0):
result = [[0, 0], [0, 0]]
return result
if u0 > u1:
result = [[0, 0], [0, 0]]
return result
res_x0=0
res_y0=0
res_x1=0
res_y1 = 0
if u0 > 0:
res_x0 = int(x0 + u0 * (x1 - x0) + 0.5)
res_y0 = int(y0 + u0 * (y1 - y0) + 0.5)
if u1 < 1:
res_x1 = int(x0 + u1 * (x1 - x0) + 0.5)
res_y1 = int(y0 + u1 * (y1 - y0) + 0.5)
result = [[res_x0, res_y0], [res_x1, res_y1]]
return result
5. 拓展:将Liang-Barsky算法改进为外裁剪算法
个人思考,不保证准确!:
前面流程不变,最后只需要将内裁剪算法得到的[u_min, u_max]在[0,1]区间中求补集。
Nicholl-Lee-Nicholl算法(NLN)
主要思想:
在裁剪窗口中周围创建多个区域以进行更多的区域测试 --> 避免对一个多线段进行多次裁剪 --> 减少求交计算
- 比上面那两个算法的除法和减法次数少
- 仅适用于二维
1. 区域划分
共有四种情况: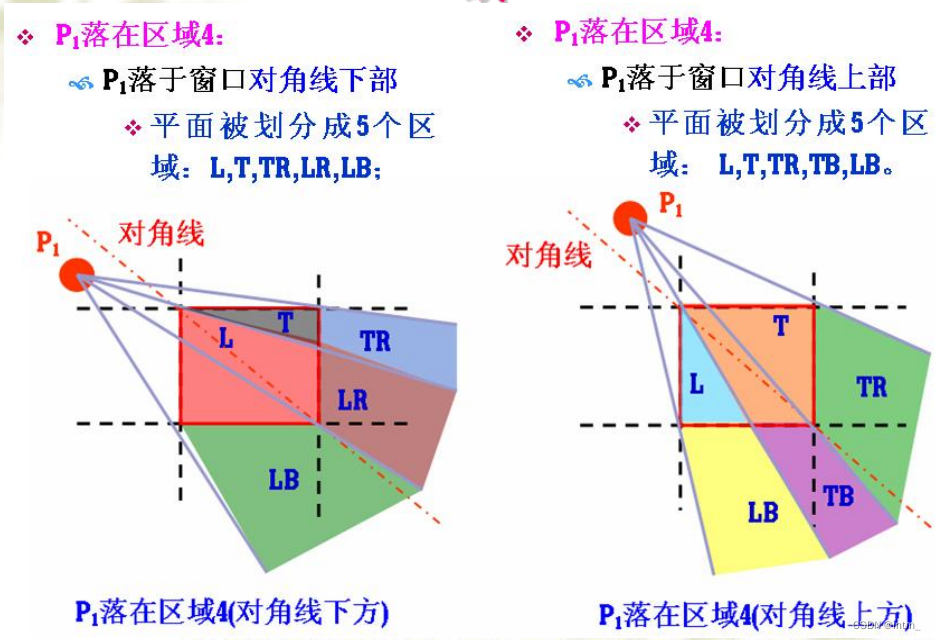
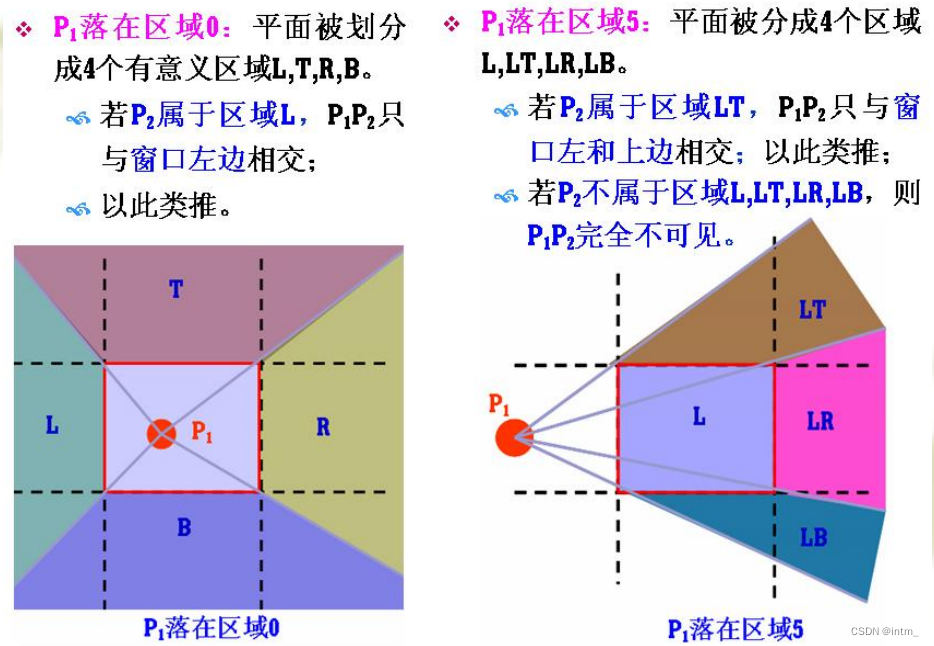
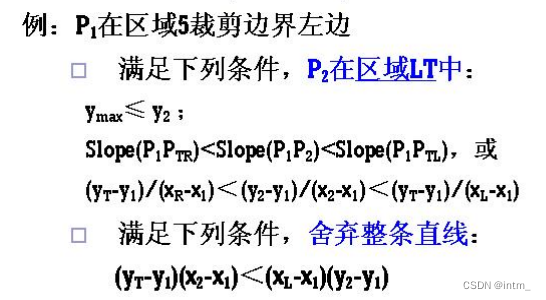
2. 确定另一顶点所在区域
采用斜率判断、坐标判断、参数方程判断···(不管什么方法,判断出来就行)
二. 多边形裁剪
采用线段裁剪算法对多边形进行裁剪
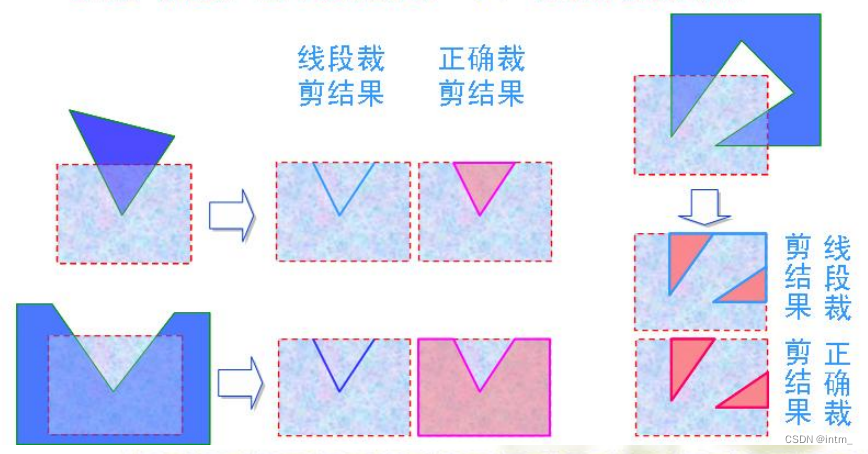
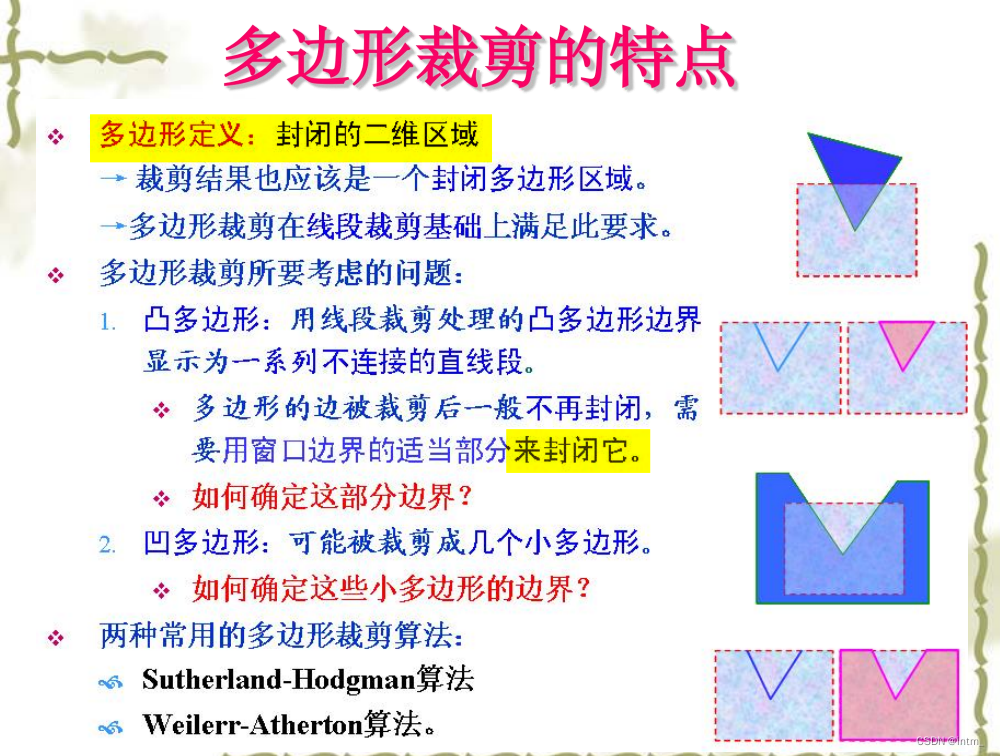
线段裁剪算法对多边形进行裁剪所要考虑的问题:
- 多边形的定义,即:多边形各组成边的关系
- 凸多边形:用线段裁剪处理的凸多边形边界显示为一系列不连接的直线段;即:多边形的边被裁剪后一般不再封闭,需要用窗口边界的适当部分来封闭它。如何确定这部分边界?
- 凹多边形:可能被裁剪成几个小多边形。如何确定这些小多边形的边界?
Sutherland-Hodgman算法(萨瑟兰-霍奇曼算法)
Sutherland-Hodgman算法也叫逐边裁剪法,该算法是萨瑟兰德(I.E.Sutherland)和霍德曼(Hodgman)在1974年提出的。这种算法采用了分割处理、逐边裁剪的方法。
1. 两个空间
裁剪窗口边界所在直线将二维空间分成两个半空间:内侧空间和外侧空间
2. 算法流程
- 对多边形顶点集初始化排序(顺时针或者逆时针)
- 定义一个输出顶点表,初始化为空
- 按照边顺序依次裁剪
- 按照边与窗口的关系将相应点保存至顶点表
- 保存规则 :
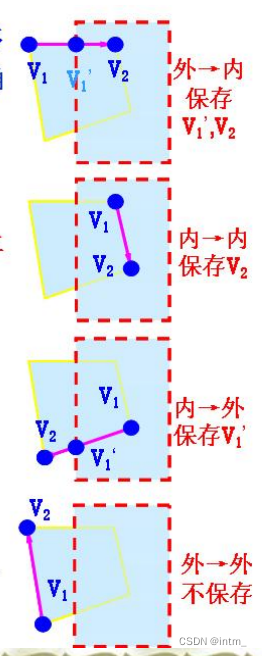
- 保存规则 :
- 按照一开始顶点规定的顺序(顺时针或逆时针)连接输出顶点表
3. 伪代码
List outputList = subjectPolygon;
for (Edge clipEdge in clipPolygon) do
List inputList = outputList;
outputList.clear();
for(int i = 0 ; i < inputList.count ; i += 1) do
Point current_point = inputList[i];
Point prev_point = inputList[(i + inputList.count - 1) % inputList.count];
Point Intersecting_point = ComputeIntersection(prev_point, current_point, clipEdge)
if (current_point inside clipEdge) then
if (prev_point not inside clipEdge) then
outputList.add(Intersecting_point);
end if
outputList.add(current_point);
else if (prev_point inside clipEdge) then
outputList.add(Intersecting_point);
end if
done
done
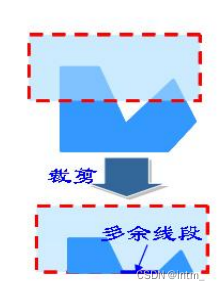
4. 算法缺陷
- Sutherland-Hodgman 裁剪算法对凹多边形进行裁剪可能出现多余的线;这种情况在裁剪结果多边形有两个或多个分离部分时会出现。
- 成因:
- 只有一个输出顶点表;
- 且结果多边形的最后一个顶点总是与其第一个顶点相连。
- 裁剪凹多边形的改进算法
- 将凹多边形分割成多个凸多边形
- Weilerr-Atherton算法:更常用的多边形算法
Weilerr-Atherton算法
1. 两个顶点表
- 初始化两个顶点表,分别为多边形顶点表和裁剪窗口顶点表(顺时针)
- 求出所有交点,并将这些交点按顺序插入两个顶点表中
- 在两个顶点表之间的相同点处建立双向指针(具体算法,为了过程中好找点,此处不理解可以接着看下面的算法流程)
2. 算法流程
-
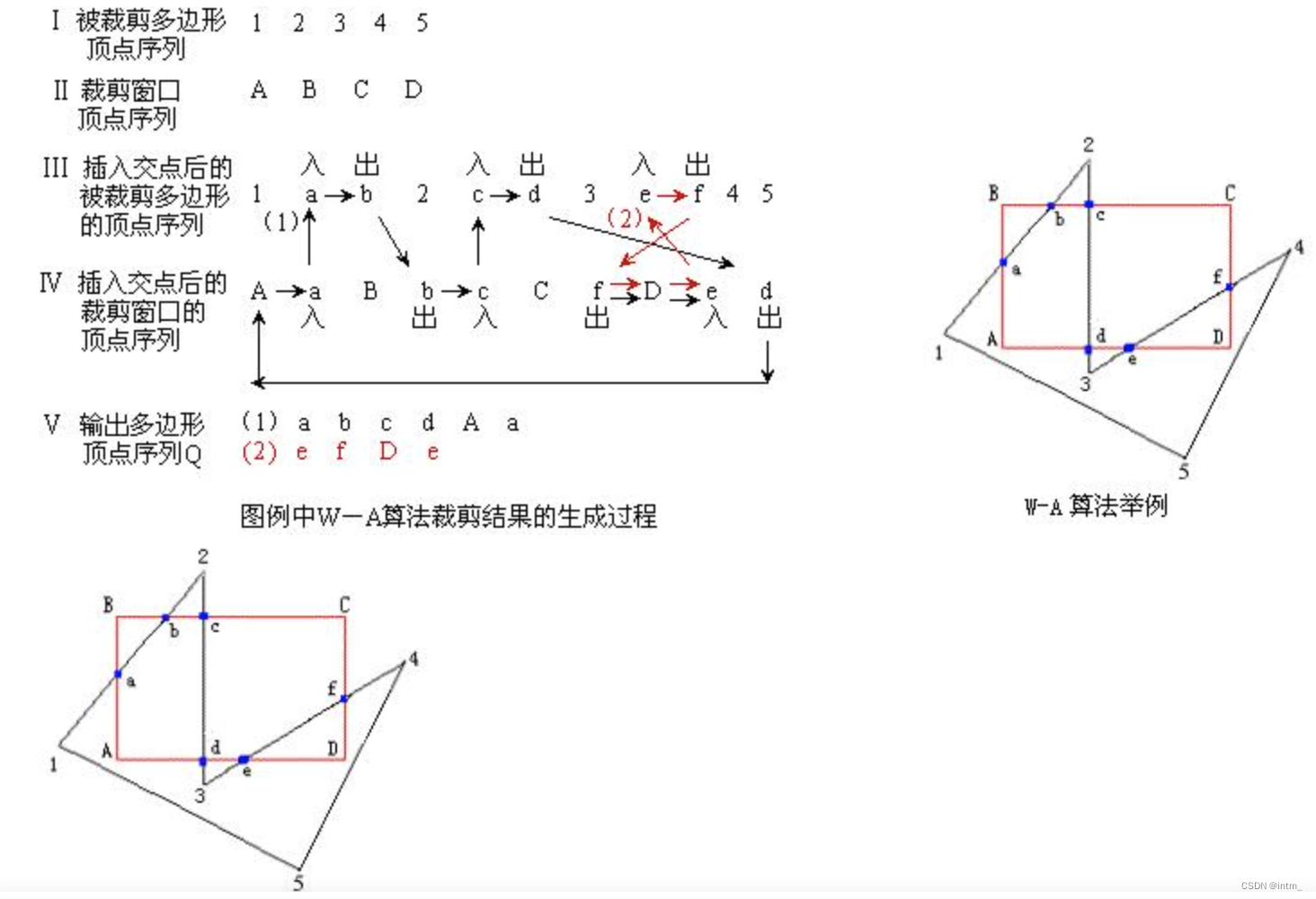
假设被裁剪多边形和裁剪窗口的顶点序列都按顺时针方向排列。当两个多边形相交时,交点必然成对出现,其中一个是从被裁剪多边形进入裁剪窗口的交点,称为入点,另一个是从被裁剪多边形离开裁剪窗口的交点,称为出点。
-
算法从被裁剪多边形的一个入点开始,碰到入点,沿着被裁剪多边形按顺时针方向搜集顶点序列;
-
而当遇到出点时,则沿着裁剪窗口按顺时针方向搜集顶点序列。
-
按上述规则,如此交替地沿着两个多边形的边线行进,直到回到起始点。这时,收集到的全部顶点序列就是裁剪所得的一个多边形。
由于可能存在分裂的多边形,因此算法要考虑:将搜集过的入点的入点记号删去,以免重复跟踪。将所有的入点搜集完毕后算法结束。
如下图:
具体流程解释可以学习:多边形裁剪二:Weiler-Atherton算法
参考博客:
[1] https://blog.csdn.net/weixin_44397852/article/details/109015504
[2] https://www.cnblogs.com/wkfvawl/p/12083197.html
[3] https://zh.wikipedia.org/zh-hans/%E8%90%A8%E7%91%9F%E5%85%B0-%E9%9C%8D%E5%A5%87%E6%9B%BC%E7%AE%97%E6%B3%95
[4] https://blog.csdn.net/yangxi_pekin/article/details/37738219

















 2691
2691

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









