







 本文概述了从R-CNN到Faster R-CNN、YOLO和SSD的目标检测方法发展,探讨了深度学习在目标检测领域的应用,强调了RPN网络、ROI Pooling Layer和回归方法对提高检测速度和精度的贡献。文章最后提到了目标检测的最新进展,包括上下文特征利用、多特征融合和循环神经网络的应用。
本文概述了从R-CNN到Faster R-CNN、YOLO和SSD的目标检测方法发展,探讨了深度学习在目标检测领域的应用,强调了RPN网络、ROI Pooling Layer和回归方法对提高检测速度和精度的贡献。文章最后提到了目标检测的最新进展,包括上下文特征利用、多特征融合和循环神经网络的应用。
摘要:
从2014年开始,目标检测取得了巨大的突破。本文针对目前主流的目标检测方法进行简单的介绍,文章分为两个部分:第一部分介绍R Girshick提出的以R-CNN为代表的结合region proposal和CNN分类的目标检测框架(R-CNN, SPP-NET, Fast R-CNN, Faster R-CNN); 第二部分介绍以YOLO为代表的将目标检测转换为回归问题的目标检测框架(YOLO, SSD); 第三部分介绍一些最新的目标检测算法的进展。
一、从Rcnn到Faster-Rcnn
从Rcnn开始RBG大神将深度学习引入目标检测领域,后来连续发力,最终将目标检测的所有计算过程都放在了GPU之内进行计算,使得计算精度和计算速度都有了很大提升。
1、 Rcnn简介
原文连接:http://people.eecs.berkeley.edu/~rbg/papers/r-cnn-cvpr.pdf
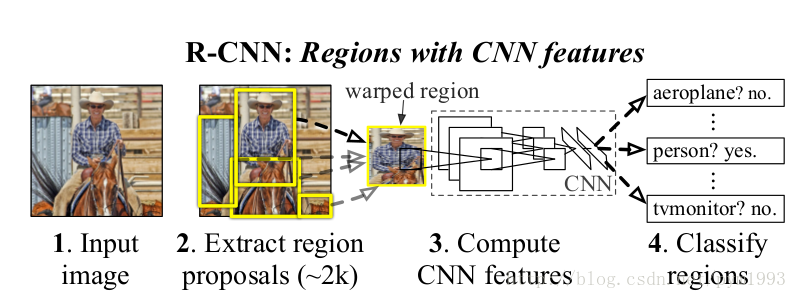
首先使用selective search算法,从图片中提取出2000个可能包含有目标的区域,在将这2000个候选区(ROI:region of interest)压缩到统一大小(227*227)送入卷积神经网络中进行特征提取,在最后一层将特征向量输入svm分类器,得到该候选区域的种类。整体上看R-cnn比较简单,但与此同时也有两个 重大缺陷:
(1)selective search进行候选区域提取的过程实在cpu内计算完成,占用了大量计算时间。
(2)对2000个候选框进行卷积计算,提取特征的时候,存在大量的重复计算,进一步增加了计算复杂度。针对以上两个缺点,R Girshick分别在Fast-Rcnn和faster-rcnn中进行了改进。
2、 fast-rcnn
原文连接:http://www.cv-foundation.org/openaccess/content_iccv_2015/papers/Girshick_Fast_R-CNN_ICCV_2015_paper.pdf
**2.1**spp-net
由于fast-rcnn借鉴了ssp-net的思想,所以先来了解一下spp-net。
原文连接:http://vc.cs.nthu.edu.tw/home/paper/codfiles/melu/201604201227/Spatial%20Pyramid%20Pooling%20in%20Deep%20Convolutional%20Networks%20for%20Visual%20Recognition.pdf
在rcnn种需要对2000个候选框进行卷积特
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 868
868

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









