







- 论文链接:https://arxiv.org/pdf/2411.02914
摘要

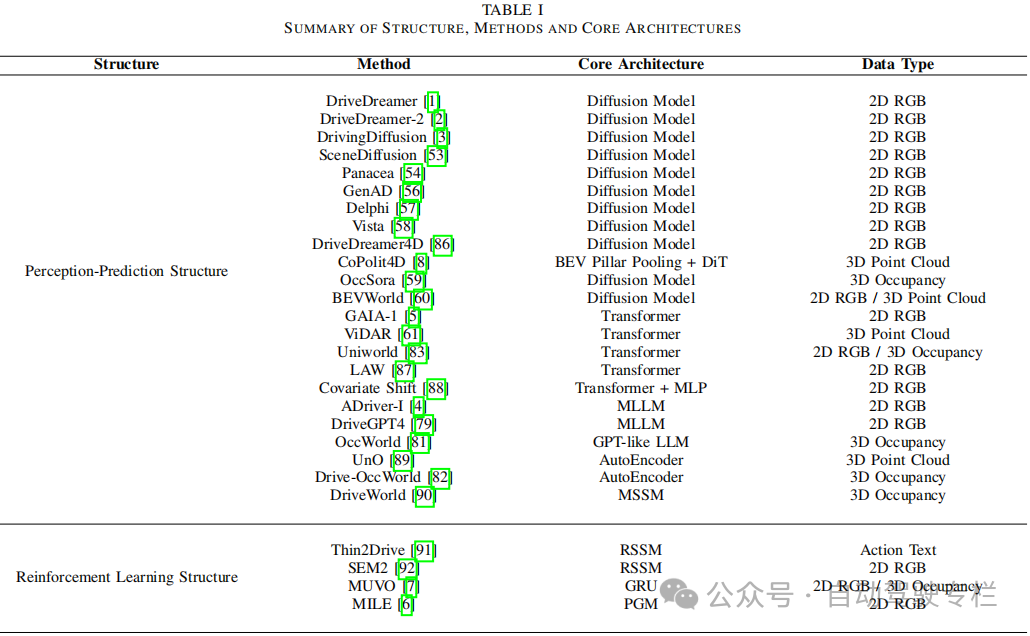
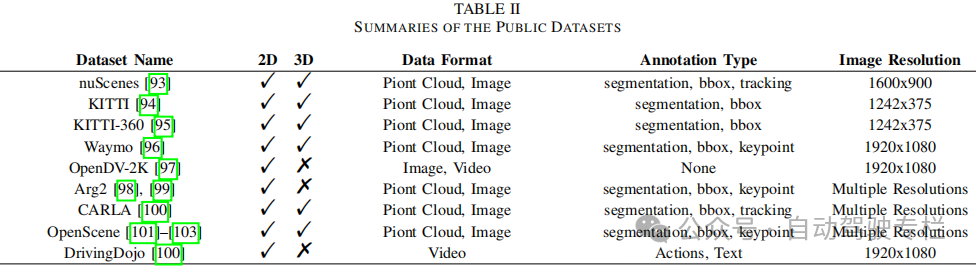
本文介绍了探索自动驾驶中视频生成与世界模型之间的相互作用:综述。世界模型和视频生成是自动驾驶领域中的关键技术,每项技术在提高自动驾驶系统的鲁棒性和可靠性方面均发挥着关键作用。仿真现实世界环境动态变化的世界模型和生成逼真视频序列的视频生成模型正越来越多地被结合,以提高自动驾驶汽车的情境感知和决策能力。本文研究了这两项技术之间的关系,着重于它们的结构相似性(特别是基于扩散的模型),这有助于对驾驶场景更准确、更连贯地仿真。本文研究了JEPA、Genie和Sora等先进工作,这些工作展现了世界模型设计的不同方法,从而突出了世界模型缺乏普遍接受的定义。这些不同的解释强调了该领域对如何优化各项自动驾驶任务的世界模型的理解。此外,本文还讨论了该领域采用的关键评估指标,例如用于3D场景重建的Chamfer distance和用于评估生成视频内容质量的Frechet Inception Distance(FID)。通过分析视频生成和世界模型之间的相互作用,本项综述确定了关键挑战和未来研究方向,强调了这些技术共同提高自动驾驶系统性能的潜力。本文的研究结果旨在全面了解视频生成和世界模型的结合是如何推动开发更安全、更可靠的自动驾驶汽车的。
主要贡献

本文的主要贡献总结如下:
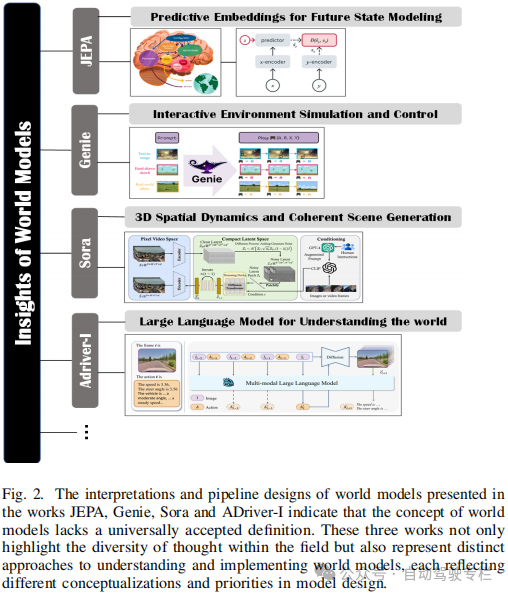
1)本文分析了各个领域中世界模型的定义,强调世界模型的概念并不完全固定。它介绍了对世界模型的理解,并且检查了自动驾驶领域中世界模型的结构一致性;
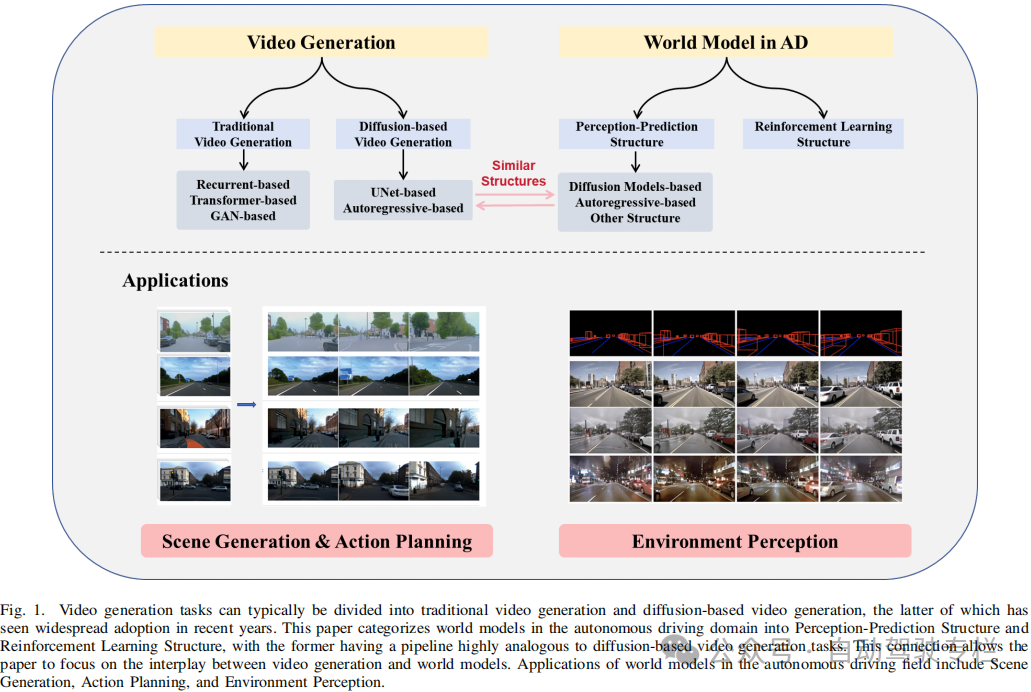
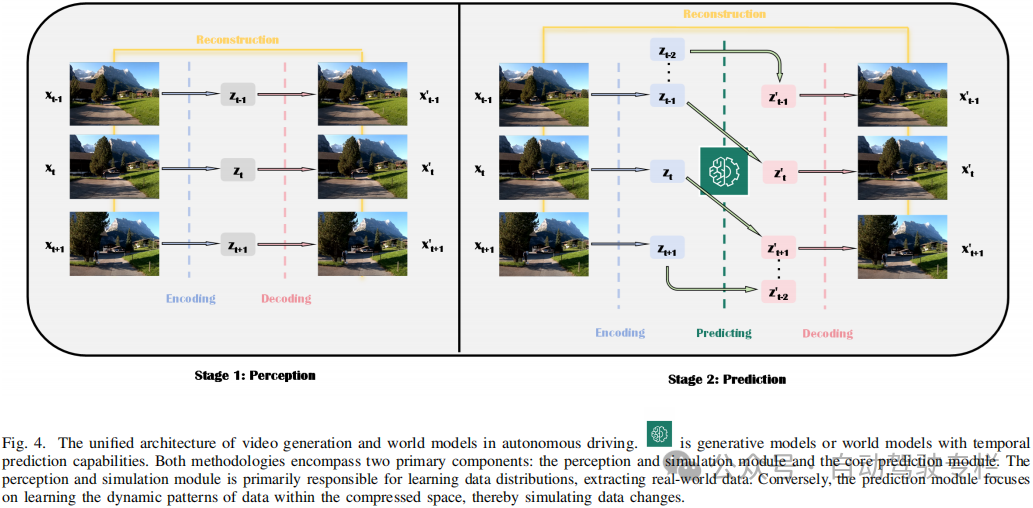
2)本项调研突出了视频生成模型和世界模型之间的结构相似性,解释了这些相似性是如何提高自动驾驶系统的性能和能力的;
3)本文确定了将视频生成和世界模型相结合的关键挑战和机遇,提供了如何在现实世界场景中进一步开发和应用这些技术的见解。
论文图片和表格

总结

本项综述探讨了视频生成模型和世界模型之间的结构和概念相似性,强调了世界模型这一新兴但是尚未定义的概念。世界模型对自动驾驶领域做出了巨大的贡献,特别是在高效建模现实世界和准确预测驾驶决策方面。此外,本文还讨论了该领域的未来前景和重大挑战,强调了世界模型的结构设计和优化仍然是持续的任务。世界模型在自动驾驶领域中具有巨大潜力,为现实世界仿真和预测分析提供了先进的功能。它们与视频生成模型无缝集成的能力增强了自动驾驶汽车情境感知和决策的准确性。尽管取得了这些进展,但是仍然存在一些挑战,包括需要更复杂的数据集成、高效的模型训练以及开发能够应对复杂且多样化驾驶场景的鲁棒框架。应对这些挑战对于自动驾驶中世界模型的持续发展和应用是至关重要的,为开发更安全、更可靠的自动驾驶系统铺平了道路。
如何学习大模型
现在社会上大模型越来越普及了,已经有很多人都想往这里面扎,但是却找不到适合的方法去学习。
作为一名资深码农,初入大模型时也吃了很多亏,踩了无数坑。现在我想把我的经验和知识分享给你们,帮助你们学习AI大模型,能够解决你们学习中的困难。
下面这些都是我当初辛苦整理和花钱购买的资料,现在我已将重要的AI大模型资料包括市面上AI大模型各大白皮书、AGI大模型系统学习路线、AI大模型视频教程、实战学习,等录播视频免费分享出来,需要的小伙伴可以扫取。

一、AGI大模型系统学习路线
很多人学习大模型的时候没有方向,东学一点西学一点,像只无头苍蝇乱撞,我下面分享的这个学习路线希望能够帮助到你们学习AI大模型。
二、AI大模型视频教程
三、AI大模型各大学习书籍
四、AI大模型各大场景实战案例

五、结束语
学习AI大模型是当前科技发展的趋势,它不仅能够为我们提供更多的机会和挑战,还能够让我们更好地理解和应用人工智能技术。通过学习AI大模型,我们可以深入了解深度学习、神经网络等核心概念,并将其应用于自然语言处理、计算机视觉、语音识别等领域。同时,掌握AI大模型还能够为我们的职业发展增添竞争力,成为未来技术领域的领导者。
再者,学习AI大模型也能为我们自己创造更多的价值,提供更多的岗位以及副业创收,让自己的生活更上一层楼。
因此,学习AI大模型是一项有前景且值得投入的时间和精力的重要选择。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









