






基于Stanley算法轨迹跟随,横向控制,车道保持的CarSim与Simulink联合仿真模型
提供全套模型文件:
(1)Carsim参数配置文件cpar,导入即可运行
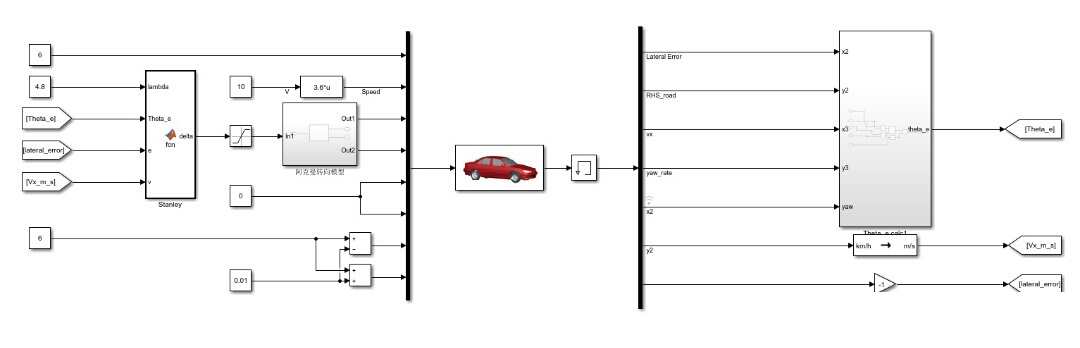
(2)simulink模型文件,模型见上图
(3)提供详细参考资料
ID:5312673847275117
多不多啦米

基于Stanley算法的轨迹跟随是一种常见的自动驾驶技术,在实际应用中扮演着重要的角色。本文介绍了一种基于CarSim与Simulink联合仿真模型的方法,该模型能够实现横向控制和车道保持功能。同时,作者还提供了全套的模型文件和详细的参考资料,方便读者进行进一步的研究和应用。
首先,我们来介绍一下CarSim参数配置文件cpar。这个文件包含了车辆模型的各种参数配置,例如车辆质量、车辆惯性矩阵、悬挂系统参数等等。读者只需导入该文件,即可进行模型运行。这种配置方式简化了模型搭建的过程,提高了工作效率。
其次,我们将重点介绍Simulink模型文件,该模型文件与CarSim联合工作。通过该模型文件,我们可以实现对车辆的横向控制和车道保持。在模型中,Stanley算法被应用于轨迹跟随功能的实现。Stanley算法是一种基于路径偏差和航向角误差的控制算法,它能够根据当前车辆状态对车辆进行操控,使其按照设定的轨迹行驶。模型的具体实现细节可以参考附上的详细参考资料。
最后,我们提供了详细的参考资料,方便读者深入了解该模型的原理和实现。这些参考资料包括了相关领域的经典论文、技术文档和实验数据等等。读者可以根据自己的需求选择相应的参考资料,进一步研究和应用该模型。
综上所述,本文介绍了基于Stanley算法的轨迹跟随、横向控制和车道保持的CarSim与Simulink联合仿真模型。该模型具有简洁高效的特点,能够满足自动驾驶领域的需求。通过提供全套的模型文件和详细的参考资料,读者可以轻松上手并进行进一步的研究和应用。希望本文能够对读者在自动驾驶技术方面的学习和应用有所帮助。
相关的代码,程序地址如下:http://wekup.cn/673847275117.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









