







目录
概述
本文主要是使用AT32F403A开发板,基于V2库串口1使用弹性DMA 来传输接收的数据功能,并且配合使用串口空闲中断(IDLE)来接收不定长的数据,主要是在上一章使用dma的基础上来使用弹性DMA来进行数据的搬运。
串口工具使用的Atlink-ez自带的串口功能。
工程建立、调试工具配置在前面章节有详细介绍。
硬件
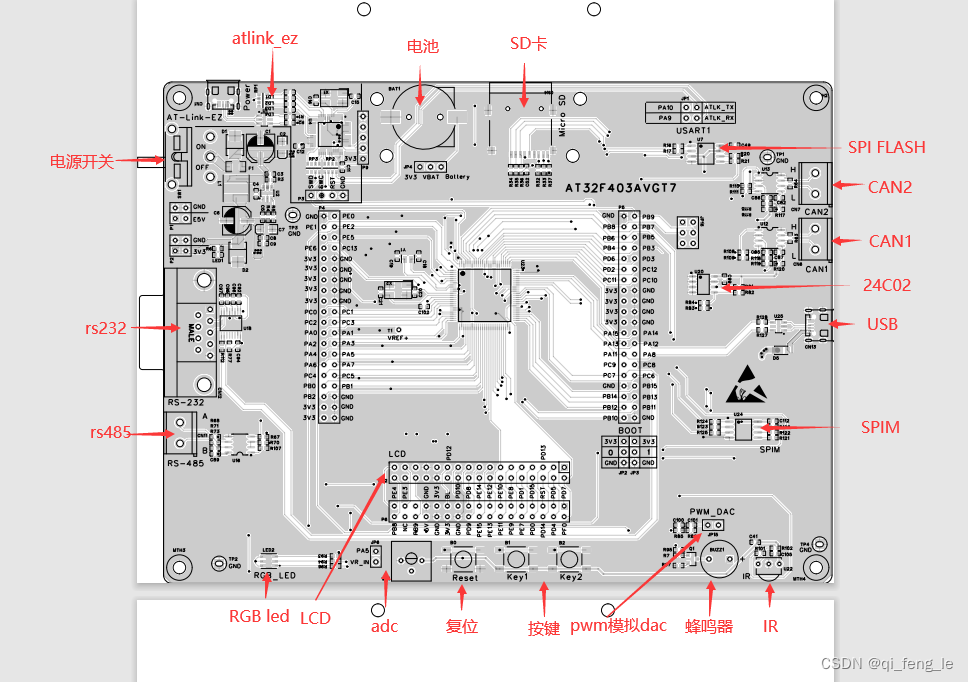
硬件方面使用的是参考官方AT32F437 SURF板子而设计的一个AT32F403A开发板,板子上的芯片是AT32F403AVGT7的型号,开发板上面还板载了一个atlink-ez的仿真器,atlink-ez除了可以在线仿真和下载之外还有一个串口的功能,硬件上是通过跳线帽接到了MCU的串口1,pa9/10上面。
如下图是开发板pcb图,以及硬件资源。(左边上角的就是atlink-ez,用usb线接到pc即可):
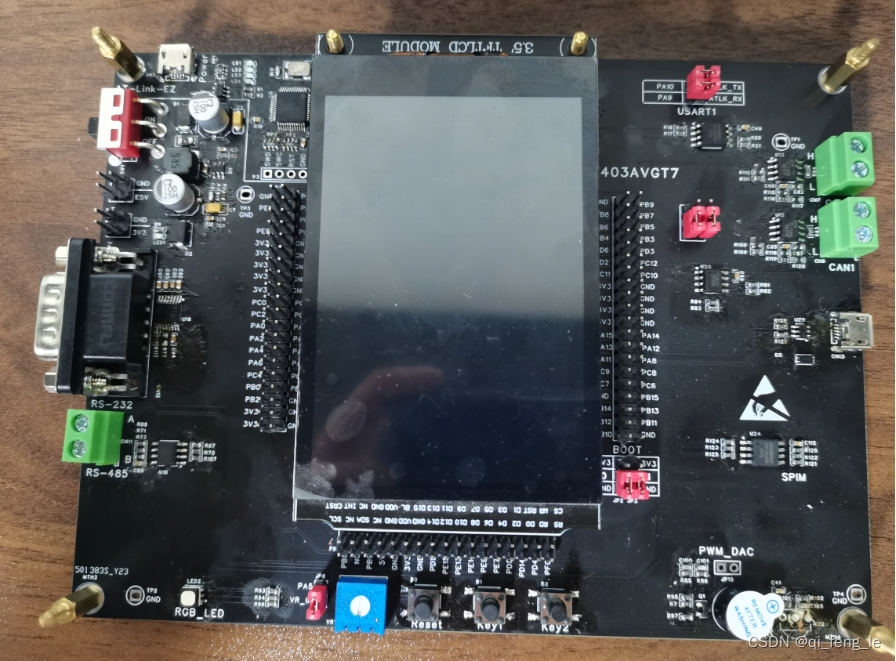
如下是实物图:
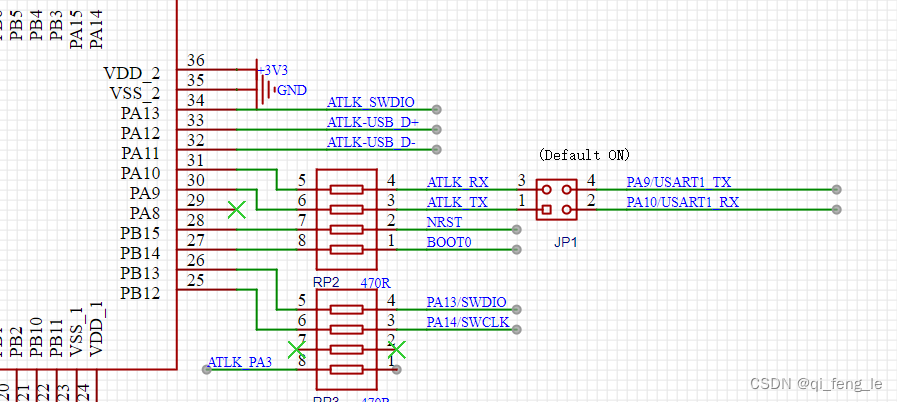
本章的主要内容是使用弹性dma对串口1的数据进行搬运,相关原理图部分(jp1的1和2,3和4,分别用跳线帽接起来):
弹性DMA
如下图默认情况下,外设和DMA的通道是固定,使用的什么外设就需要使用对应的dma通道才能正常进行搬运工作。
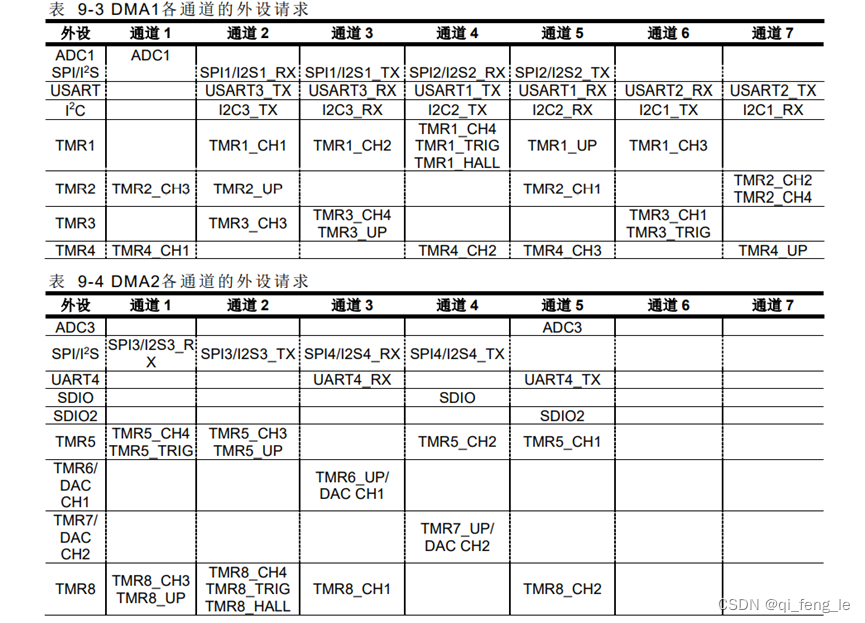
从图可以看出,串口1的收发对应的DMA通道是DMA1的通道5和通道4,所以默认情况下就串口1只能使用DMA1的通道4/5来使用,并且收发通道也是固定的,但是在弹性DMA的功能下,就不再有这个局限,外设和通道的对应可以自行设定,比如可以设置串口的接收dma通道为7个通道里面的随意一个通道。这样在多通道使用的时候可以很好的分配通道和外设的对应关系。本文就是使用通道1作为串口1发送通道,通道2作为串口1接收通道。
弹性DMA需要特别注意,当DMA开启弹性功能后,那么这DMA控制器的其他通道也是失效了,也就是其他通道要使用的时候都需要设置为弹性通道,原本默认的就失去效果。
软件
流程
软件上主流程是串口1使用DMA1通道2来搬运串口1收到的数据到接收缓存中,由于dma的搬运的数据长度是必须先设定好的,接收时是不能判定外面有多少数据过来的,使用串口1空闲中断来判定接收完毕,然后把收到的数据复制到发送缓存里面,同时重新设定DMA1通道2的配置,以继续接收下一包数据;收到一帧数据后,通过DMA1 通道1把发送缓存里面的数据通过DMA1 通道1搬运到串口1的发送寄存器,串口1就可以把数据给发送出来了。
初始化
初始化部分包括gpio的初始化、串口的初始化、DMA的初始化、设置弹性DMA,绑定外设和通道。串口1使用默认的IO,PA9、PA10,开始使能串口1的DMA接收以及使能DMA1通道2,因为我们的主流程是收到数据后再发送出来的,在需要发送的时候再使能串口1的DMA发送以及使能DMA1通道1。
DMA的详细介绍和初始化可转上一章浏览,弹性dma主要就是需要开启弹性dam,绑定通道和外设,然后初始化配置通道。
设置弹性dma函数:

软件上配置串口1的波特率为115200,数据位8位,停止位1位,开启空闲中断(IDLE)。
串口空闲中断(IDLE)中清中断状态,获取dma搬运的数据也就是收到的数据长度了,再把数据复制到发送缓存中,然后重新设定DMA1通道2,接收下一帧数据。
初始化代码:
/*
*串口1 弹性DMA配置函数
*IO:PA9/PA10
*blound: 波特率
*数据位 8,停止位 1,无校验
*DMA1,通道1/2
*/
void usart1_fix_dma_init(u32 bound)
{
gpio_init_type gpio_init_struct;
dma_init_type dma_init_struct;
/*Enable the UART Clock*/
crm_periph_clock_enable(CRM_GPIOA_PERIPH_CLOCK, TRUE); //开启GPIOA的时钟
crm_periph_clock_enable(CRM_USART1_PERIPH_CLOCK, TRUE); //开启USART1的时钟
crm_periph_clock_enable(CRM_DMA1_PERIPH_CLOCK, TRUE); //开启DMA1的时钟
gpio_default_para_init(&gpio_init_struct);
/* Configure the UART1 TX pin */
gpio_init_struct.gpio_drive_strength = GPIO_DRIVE_STRENGTH_STRONGER; //较大电流推动/吸入能力
gpio_init_struct.gpio_out_type = GPIO_OUTPUT_PUSH_PULL; //推挽输出
gpio_init_struct.gpio_mode = GPIO_MODE_MUX; //复用
gpio_init_struct.gpio_pins = GPIO_PINS_9; //PA9
gpio_init_struct.gpio_pull = GPIO_PULL_NONE; //无上下拉
gpio_init(GPIOA, &gpio_init_struct);
/* Configure the UART1 RX pin */
gpio_init_struct.gpio_drive_strength = GPIO_DRIVE_STRENGTH_STRONGER; //较大电流推动/吸入能力
gpio_init_struct.gpio_out_type = GPIO_OUTPUT_PUSH_PULL; //推挽输出(输入模式,无效)
gpio_init_struct.gpio_mode = GPIO_MODE_INPUT; //输入模式
gpio_init_struct.gpio_pins = GPIO_PINS_10; //PA10
gpio_init_struct.gpio_pull = GPIO_PULL_UP; //上拉
gpio_init(GPIOA, &gpio_init_struct);
dma_reset(DMA1_CHANNEL1);
dma_default_para_init(&dma_init_struct);
dma_init_struct.buffer_size = 0; //内存大小
dma_init_struct.direction = DMA_DIR_MEMORY_TO_PERIPHERAL; //外设地址为目的地址
dma_init_struct.memory_base_addr = (uint32_t)0; //内存地址
dma_init_struct.memory_data_width = DMA_MEMORY_DATA_WIDTH_BYTE; //内存数据的宽度
dma_init_struct.memory_inc_enable = TRUE; //内存地址递增打开
dma_init_struct.peripheral_base_addr = (uint32_t)&USART1->dt; //外设地址
dma_init_struct.peripheral_data_width = DMA_PERIPHERAL_DATA_WIDTH_BYTE; //外设数据的宽度
dma_init_struct.peripheral_inc_enable = FALSE; //外设地址递增关闭
dma_init_struct.priority = DMA_PRIORITY_MEDIUM; //中等优先级
dma_init_struct.loop_mode_enable = FALSE; //不循环
dma_init(DMA1_CHANNEL1, &dma_init_struct);
dma_reset(DMA1_CHANNEL2);
dma_init_struct.peripheral_base_addr=(uint32_t)&USART1->dt; //外设地址
dma_init_struct.memory_base_addr=(uint32_t)Muartnum[0].Uartrxbuf; //内存地址
dma_init_struct.direction=DMA_DIR_PERIPHERAL_TO_MEMORY; //外设地址为源地址
dma_init_struct.buffer_size=USART_REC_LEN;
dma_init(DMA1_CHANNEL2, &dma_init_struct);
dma_flexible_config(DMA1, FLEX_CHANNEL1, DMA_FLEXIBLE_UART1_TX); //DMA1的通道1弹性设定为串口1的dma发送通道
dma_flexible_config(DMA1, FLEX_CHANNEL2, DMA_FLEXIBLE_UART1_RX); //DMA1的通道2弹性设定为串口1的dma接收通道
usart_dma_receiver_enable(USART1,TRUE); //使能串口dma接收
dma_channel_enable(DMA1_CHANNEL2, TRUE); //使能通道2
nvic_irq_enable(USART1_IRQn, 0, 0); //使能串口1中断,优先级0,次优先级0
/*Configure UART param*/
usart_init(USART1, bound, USART_DATA_8BITS, USART_STOP_1_BIT); //波特率,8数据位,1停止位
usart_hardware_flow_control_set(USART1,USART_HARDWARE_FLOW_NONE); //无硬件流操作
usart_parity_selection_config(USART1,USART_PARITY_NONE); //无校验
usart_transmitter_enable(USART1, TRUE); //使能发送
usart_receiver_enable(USART1, TRUE); //使能接收
usart_interrupt_enable(USART1, USART_IDLE_INT, TRUE); //使能串口空闲中断
usart_enable(USART1, TRUE); //使能串口
}
串口1中断服务函数:
/*
*串口1中断服务函数
*
*
*/
void USART1_IRQHandler(void)
{
uint8_t clear;
if(usart_flag_get(USART1, USART_IDLEF_FLAG) != RESET) // USART1总线空闲
{
clear=USART1->sts; // USART1清除空闲中断标志位
clear=USART1->dt; // USART1清除空闲中断标志位
clear&=0;
Muartnum[0].Uartrxsta = 1; // USART1接收完成标志位
Muartnum[0].Uartrxcut=USART_REC_LEN-dma_data_number_get(DMA1_CHANNEL2); //获取DMA通道2收到的数据长度
Muartnum[0].Uarttxcut=Muartnum[0].Uartrxcut;
memcpy(Muartnum[0].Uarttxbuf,Muartnum[0].Uartrxbuf,Muartnum[0].Uarttxcut); //数据复制到txbuf里面
usartdmarecv(Muartnum[0].Uartrxbuf,USART_REC_LEN); //重新设定dma,接收下一包数据
}
}DMA1通道2设置函数:
/**
* 串口1的DMA接收设置函数
* data:接收数据的buf地址
* len:设定接收的最大数据长度
*/
void usartdmarecv(u8 *data,u16 len)
{
dma_flag_clear(DMA1_FDT2_FLAG); //清标志
dma_channel_enable(DMA1_CHANNEL2, FALSE); //关闭通道2
usart_dma_receiver_enable(USART1,FALSE); //关闭USART1 DMA 接收
DMA1_CHANNEL2->dtcnt=len; //接收的数据长度
DMA1_CHANNEL2->maddr=(uint32_t)data; //存放数据buf地址
usart_dma_receiver_enable(USART1,TRUE); //开启USART1 DMA 接收
dma_channel_enable(DMA1_CHANNEL2, TRUE); //开启通道2(开始接收)
}
DMA1通道1发送函数:
/**
* 串口1的DMA循环发送函数
* data:要发送的buf地址
* len:数据长度
*/
void usartdmasend(u8 *data,u16 len)
{
DMA1_CHANNEL1->dtcnt=len; //发送的数据长度
DMA1_CHANNEL1->maddr=(uint32_t)data; //数据buf地址
usart_dma_transmitter_enable(USART1,TRUE); //开启USART1 DMA 发送
dma_channel_enable(DMA1_CHANNEL1, TRUE); //开启通道1(开始发送)
while(dma_flag_get(DMA1_FDT1_FLAG)==RESET ); //等待传输完成
dma_flag_clear(DMA1_FDT1_FLAG); //清标志
dma_channel_enable(DMA1_CHANNEL1, FALSE); //关闭通道1
usart_dma_transmitter_enable(USART1,FALSE); //关闭USART1 DMA 发送
}测试
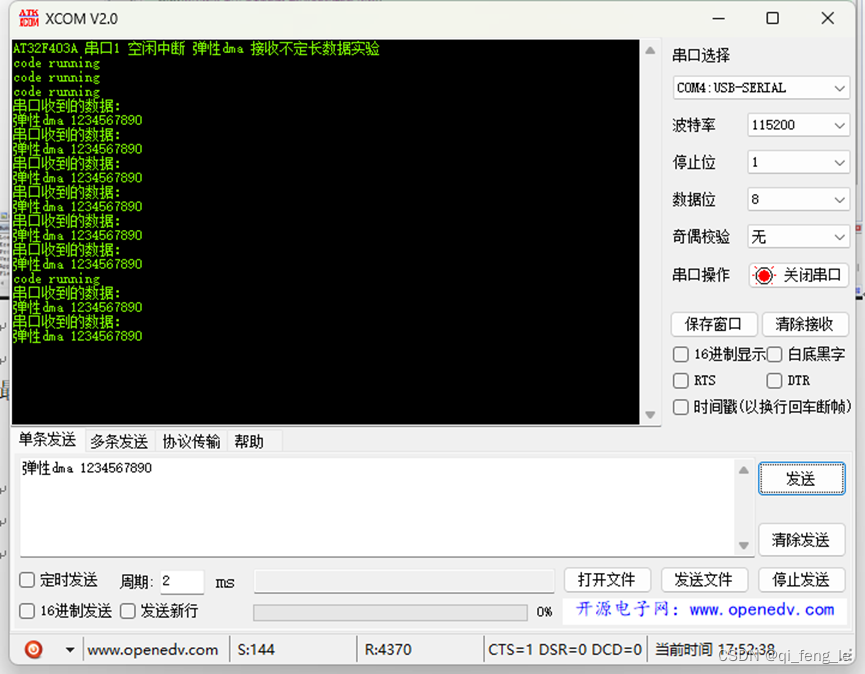
通过串口往板子发送数据,正常的话会收到相同的数据,经过测试,功能正常,成功开启了弹性dma功能,使用通道1和通道2传输了串口1的数据。需要注意的是,串口的缓存设置的512的字节长度,DMA1 通道2的长度也设置的512,所以发给板子的最大长度是512字节。
测试代码:
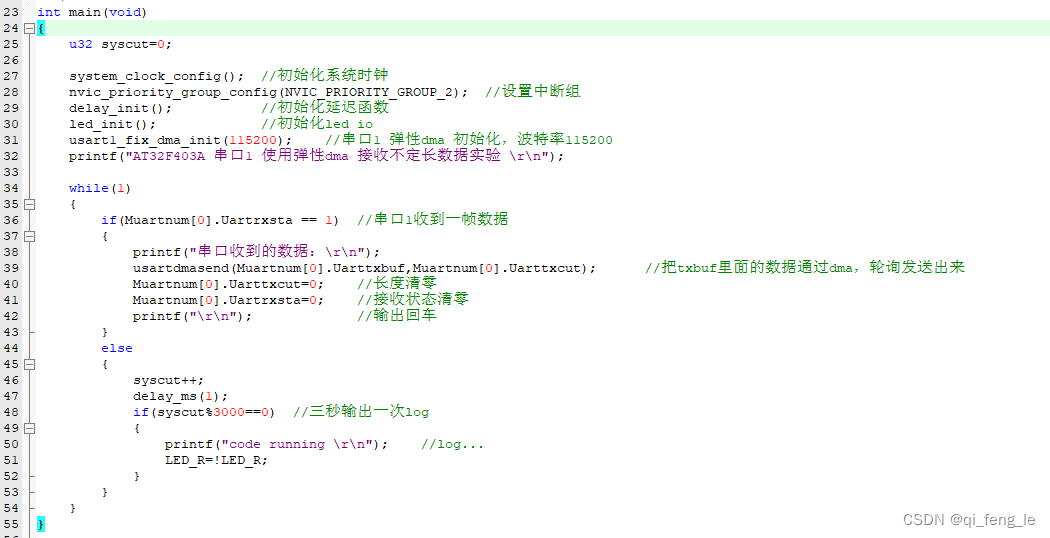
测试结果:
最后
有问题的可以加QQ群交流,同时相关代码上传到QQ群中。















 1120
1120











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









