







🌈个人主页:秦jh_-CSDN博客
🔥 系列专栏:https://blog.csdn.net/qinjh_/category_12575764.html?spm=1001.2014.3001.5482

目录
前言
💬 hello! 各位铁子们大家好哇。
今日更新了map和set封装的相关内容
🎉 欢迎大家关注🔍点赞👍收藏⭐️留言📝
key和pair
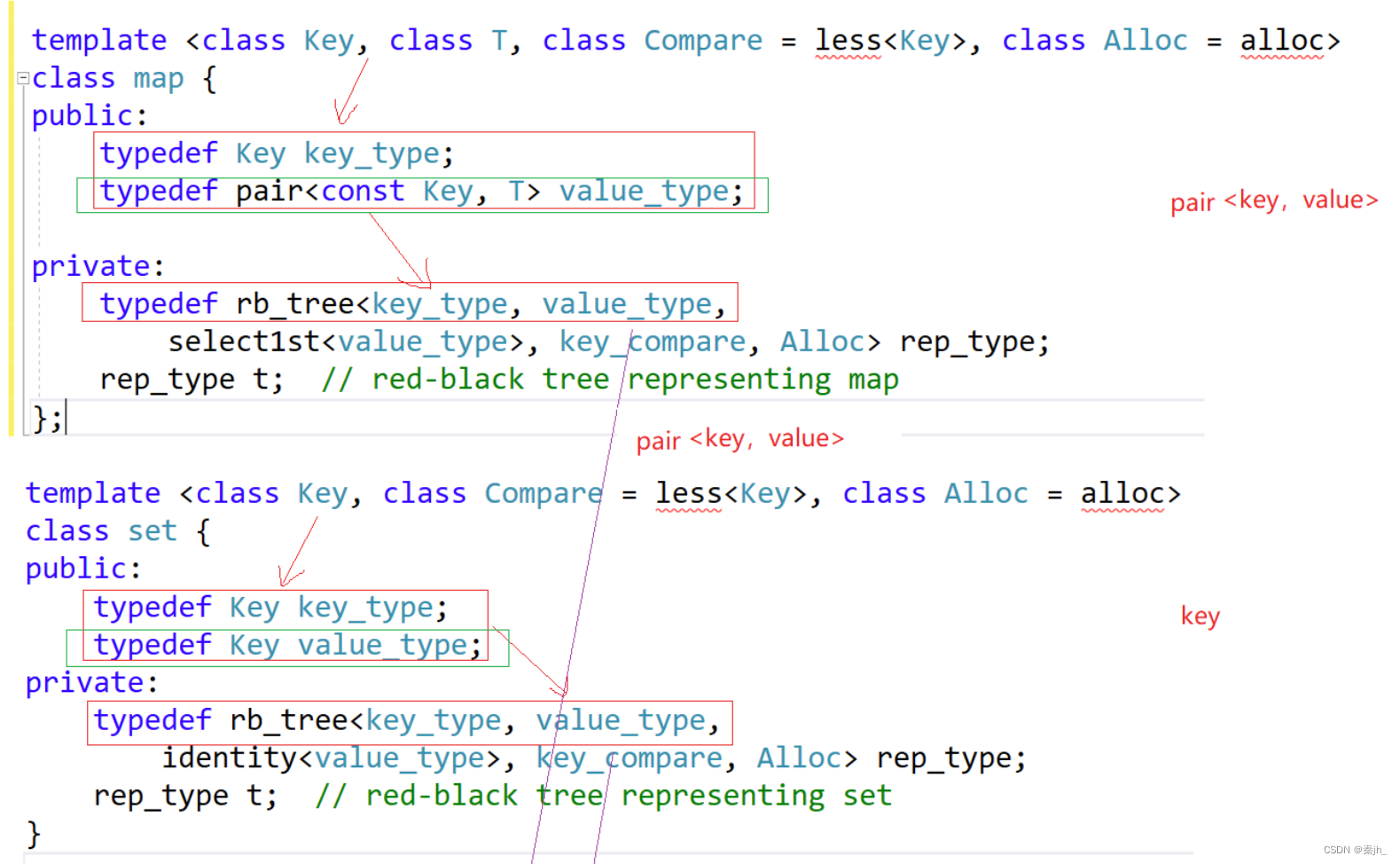
上图是源码中的主要部分代码,可以看到,map里面存的是key和pair,而set里面存的是key和key。
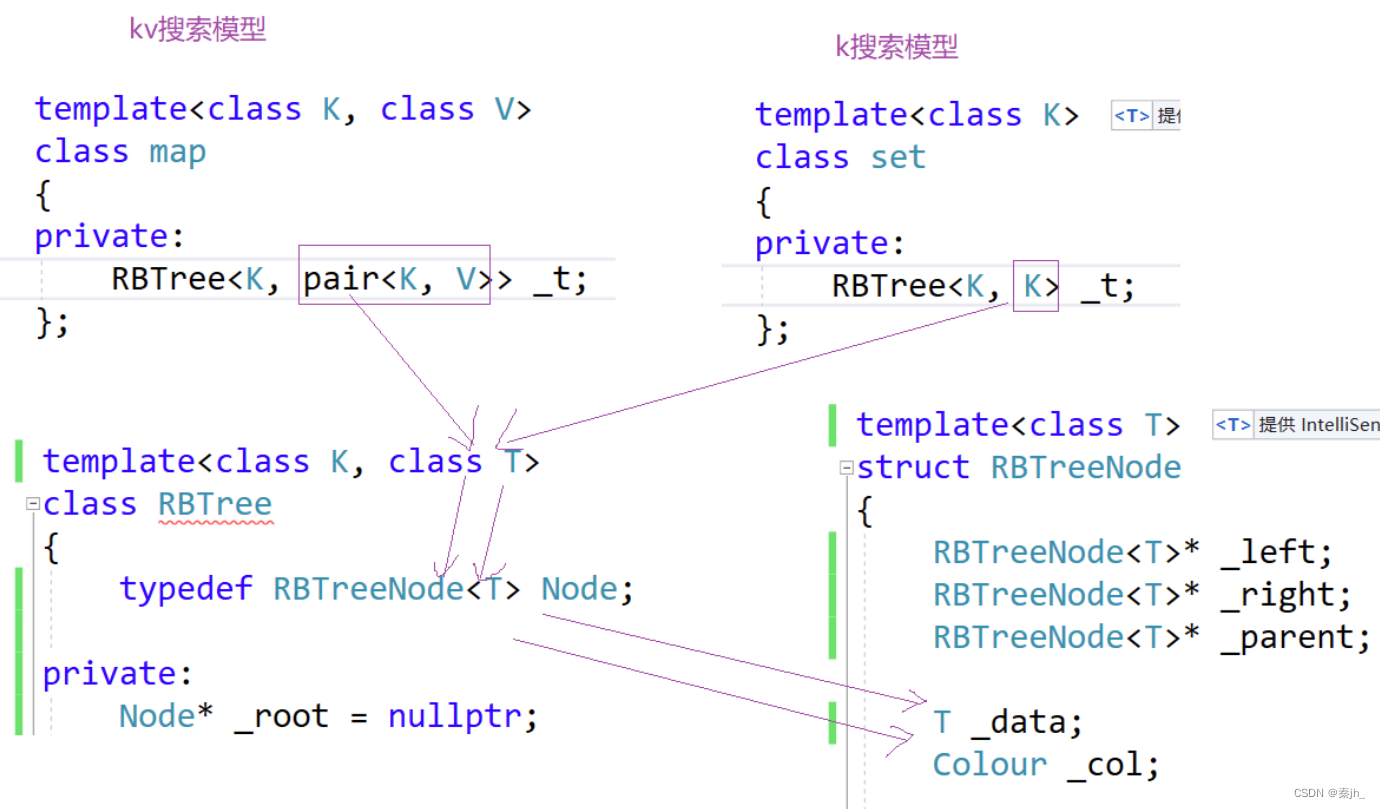
上图是底层大概思路。根据传入的类型不同(key或者pair),变成相应的搜索模型。
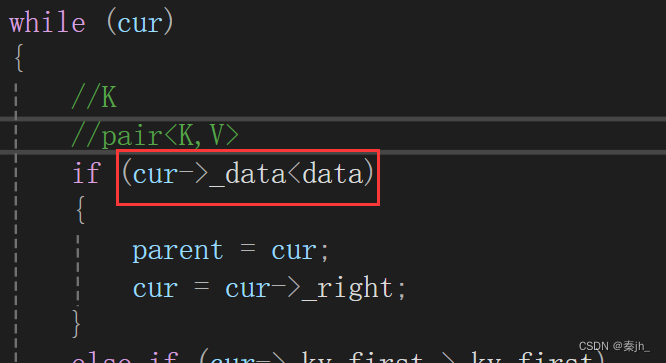
我们插入的时候要进行比较,但是我们不知道插入的是K还是pair,所以不能直接用data。虽然pair支持比较,但是它的比较不符合我们的需要,所以不能用。
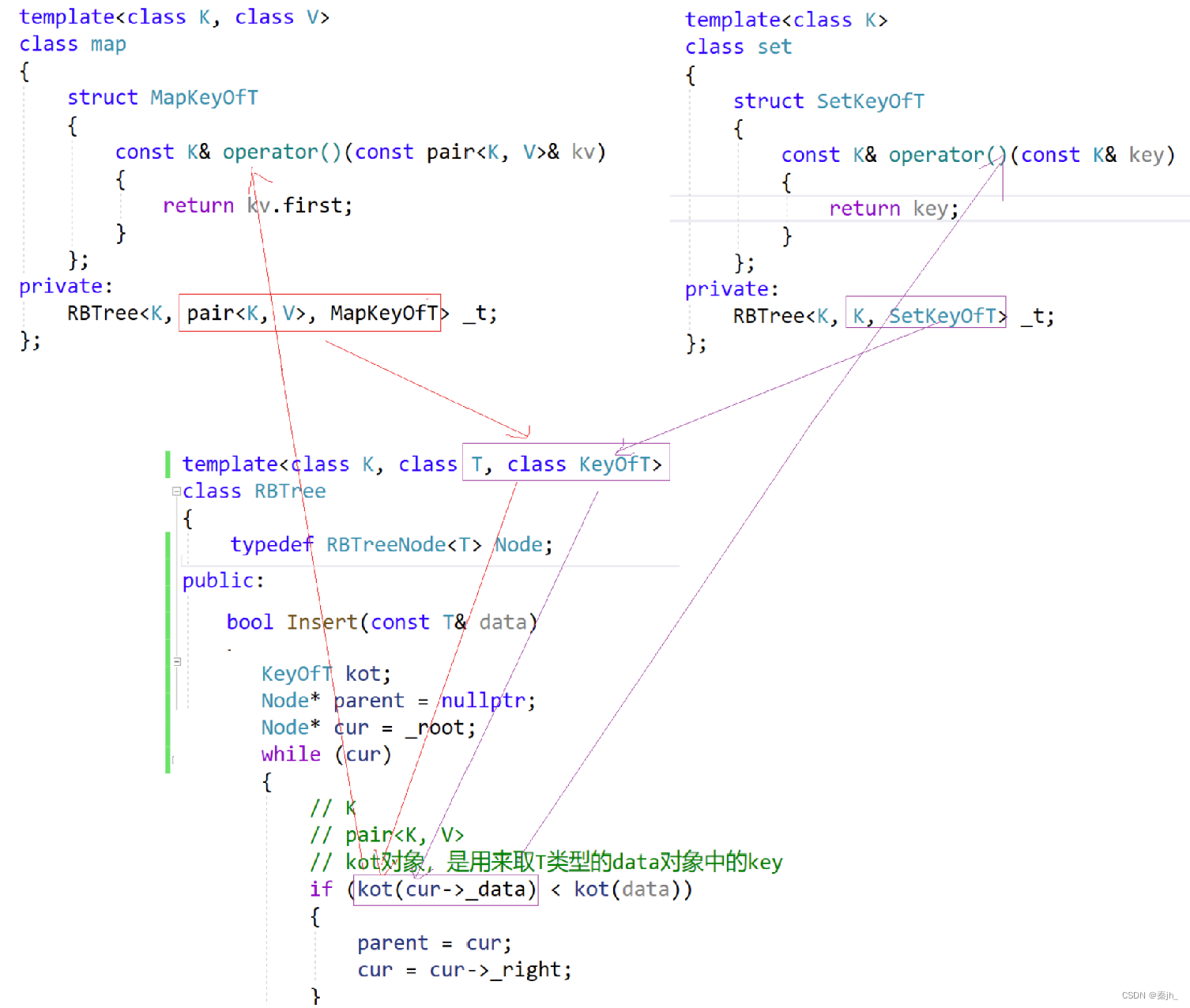
上图是解决思路,底层的RBTree不知道传入的是k还是pair,但是上层的map和set知道。所以在RBTree多传入一个模板参数KeyOfT,这样再在map和set中分别实现取出key的逻辑即可。
迭代器
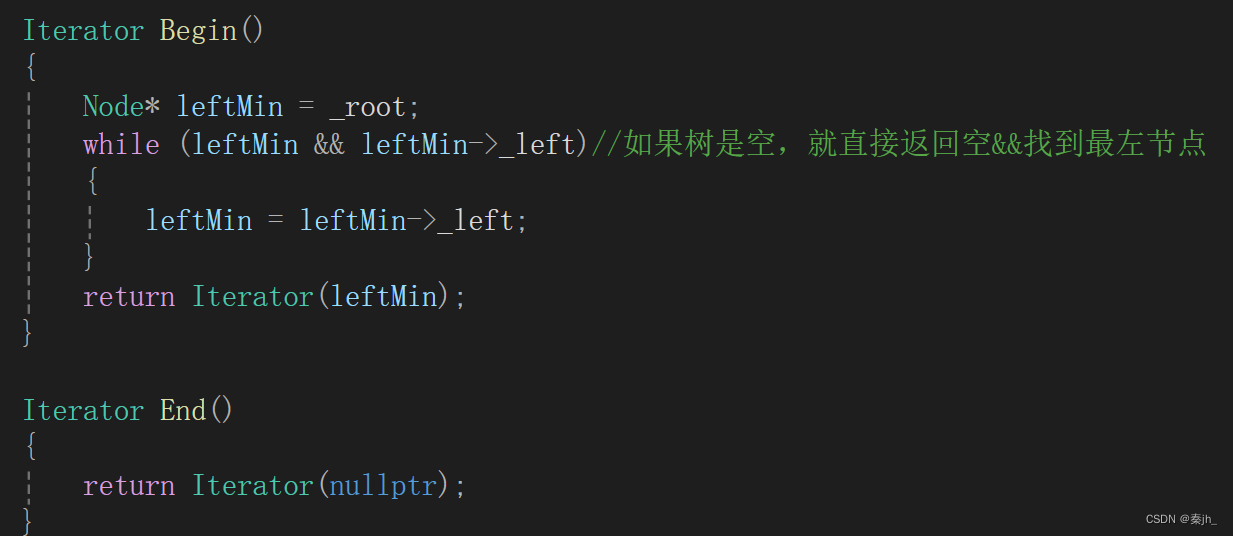
STL明确规定,begin()与end()代表的是一段前闭后开的区间,而对红黑树进行中序遍历后, 可以得到一个有序的序列,因此:begin()可以放在红黑树中最小节点(即最左侧节点)的位 置,end()放在最大节点(最右侧节点)的下一个位置。
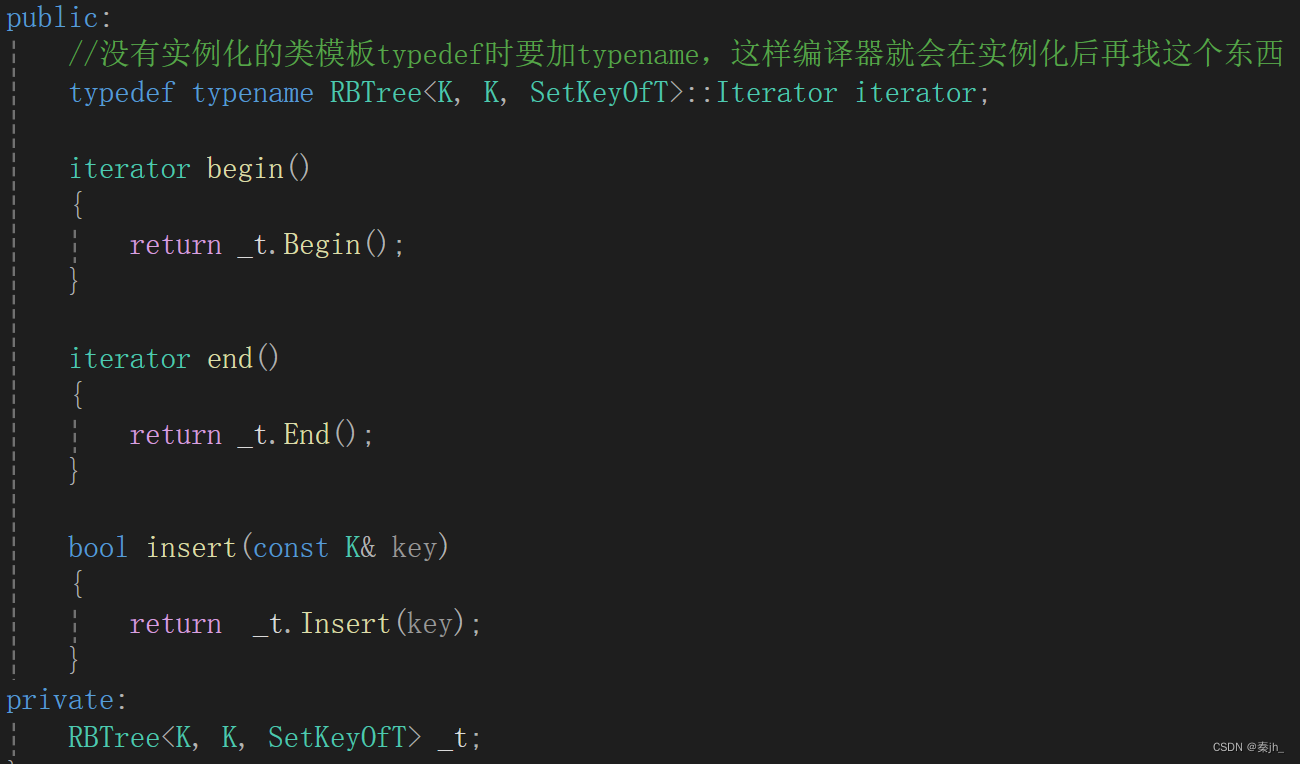
底层实现好后,就可以封装到set和map上了,如下图 :
set的迭代器不能修改,map的first不能修改,second可以修改。所以还需要改进,如下图:



const迭代器

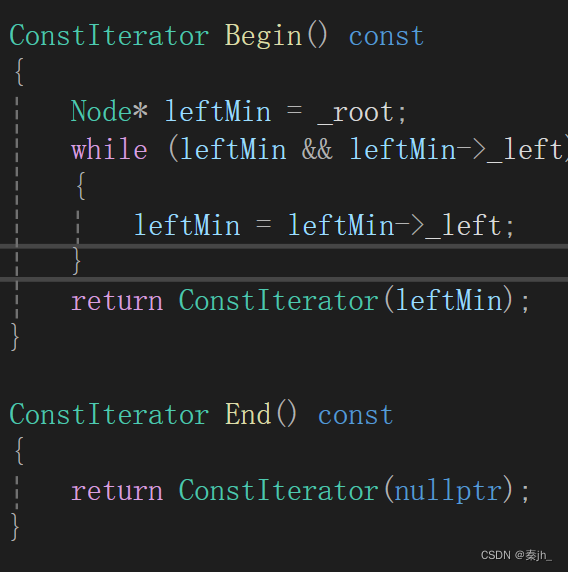
上图是底层RBTree实现。

上图是封装到set中。

上图是封装到map中。
完整代码
set和map的底层都是红黑树
RBTree.h
#pragma once
enum Colour
{
RED,
BLACK
};
template<class T>
struct RBTreeNode
{
RBTreeNode<T>* _left;
RBTreeNode<T>* _right;
RBTreeNode<T>* _parent;
T _data;
Colour _col;
RBTreeNode(const T& data)
:_left(nullptr)
, _right(nullptr)
, _parent(nullptr)
, _data(data)
, _col(RED)
{}
};
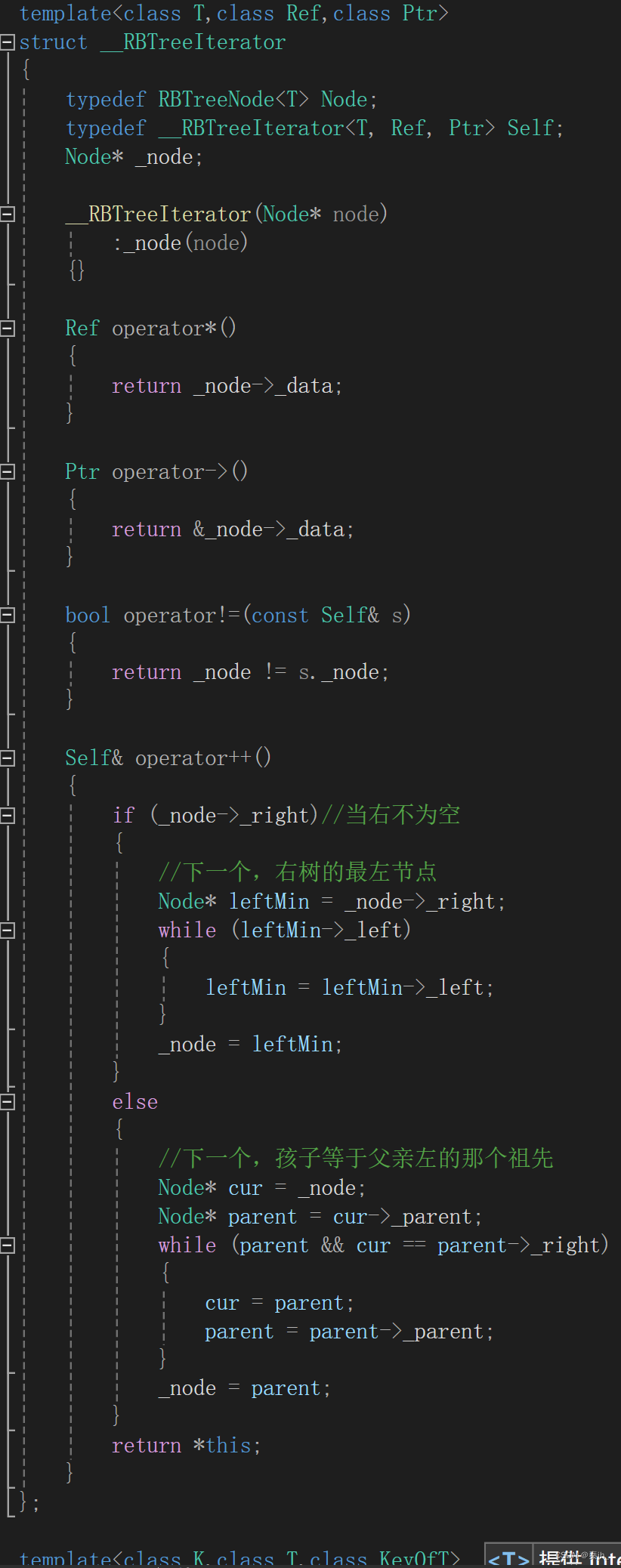
template<class T,class Ref,class Ptr>
struct __RBTreeIterator
{
typedef RBTreeNode<T> Node;
typedef __RBTreeIterator<T, Ref, Ptr> Self;
Node* _node;
__RBTreeIterator(Node* node)
:_node(node)
{}
Ref operator*()
{
return _node->_data;
}
Ptr operator->()
{
return &_node->_data;
}
bool operator!=(const Self& s)
{
return _node != s._node;
}
Self& operator++()
{
if (_node->_right)//当右不为空
{
//下一个,右树的最左节点
Node* leftMin = _node->_right;
while (leftMin->_left)
{
leftMin = leftMin->_left;
}
_node = leftMin;
}
else
{
//下一个,孩子等于父亲左的那个祖先
Node* cur = _node;
Node* parent = cur->_parent;
while (parent && cur == parent->_right)
{
cur = parent;
parent = parent->_parent;
}
_node = parent;
}
return *this;
}
};
template<class K,class T,class KeyOfT>
class RBTree
{
typedef RBTreeNode<T> Node;
public:
typedef __RBTreeIterator<T, T&, T*> Iterator;
typedef __RBTreeIterator<T, const T&, const T*> ConstIterator;
RBTree() = default; //强制生成构造函数
RBTree(const RBTree<K, T, KeyOfT>& t) //拷贝构造,防止浅拷贝
{
_root = Copy(t._root);
}
//t2=t1
RBTree<K, T, KeyOfT>& operator=(RBTree<K, T, KeyOfT> t)
{
swap(_root, t._root);
return *this;
}
~RBTree()
{
Destroy(_root);
_root = nullptr;
}
Iterator Begin()
{
Node* leftMin = _root;
while (leftMin && leftMin->_left)//如果树是空,就直接返回空&&找到最左节点
{
leftMin = leftMin->_left;
}
return Iterator(leftMin);
}
Iterator End()
{
return Iterator(nullptr);
}
ConstIterator Begin() const
{
Node* leftMin = _root;
while (leftMin && leftMin->_left)//如果树是空,就直接返回空&&找到最左节点
{
leftMin = leftMin->_left;
}
return ConstIterator(leftMin);
}
ConstIterator End() const
{
return ConstIterator(nullptr);
}
Iterator Find(const K& key)
{
KeyOfT kot;
Node* cur = _root;
while (cur)
{
if (kot(cur->_data) < key)
{
cur = cur->_right;
}
else if (kot(cur->_data) > key)
{
cur = cur->_left;
}
else
{
return Iterator(cur);
}
}
return End();
}
pair<Iterator,bool> Insert(const T& data)
{
if (_root == nullptr)
{
_root = new Node(data);
_root->_col = BLACK; //根节点默认黑色
return make_pair(Iterator(_root), true);
}
KeyOfT kot;
Node* cur = _root;
Node* parent = nullptr;
while (cur)
{
//K
//pair<K,V>
//kot对象,是用来取T类型的data对象中的key
if (kot(cur->_data)<kot(data))
{
parent = cur;
cur = cur->_right;
}
else if (kot(cur->_data) > kot(data))
{
parent = cur;
cur = cur->_left;
}
else
{
return make_pair(Iterator(cur), false);
}
}
cur = new Node(data);
Node* newnode = cur;
cur->_col = RED; //新增节点给红色
if (kot(parent->_data) < kot(data))
{
parent->_right = cur;
}
else
{
parent->_left = cur;
}
cur->_parent = parent;
// 检测新节点插入后,红黑树的性质是否造到破坏
//父亲的颜色是黑色也结束
while (parent && parent->_col == RED)
{
//关键看叔叔
Node* grandfather = parent->_parent;
if (parent == grandfather->_left)
{
Node* uncle = grandfather->_right;
//如果叔叔存在也为红->变色即可
if (uncle && uncle->_col == RED)
{
parent->_col = uncle->_col = BLACK;
grandfather->_col = RED;
//继续往上处理
cur = grandfather;
parent = cur->_parent;
}
else //叔叔不存在,或者存在且为黑
{
if (cur == parent->_left)
{
// g
// p u
// c
//单旋
RotateR(grandfather);
parent->_col = BLACK;
grandfather->_col = RED;
}
else
{
// g
// p u
// c
//双旋
RotateL(parent);
RotateR(grandfather);
cur->_col = BLACK;
grandfather->_col = RED;
}
break;
}
}
else
{
Node* uncle = grandfather->_left;
//如果叔叔存在也为红->变色即可
if (uncle && uncle->_col == RED)
{
parent->_col = uncle->_col = BLACK;
grandfather->_col = RED;
//继续往上处理
cur = grandfather;
parent = cur->_parent;
}
else //叔叔不存在,或者存在且为黑
{
// g
// u p
// c
if (cur == parent->_right)
{
RotateL(grandfather);
parent->_col = BLACK;
grandfather->_col = RED;
}
else
{
// g
// u p
// c
RotateR(parent);
RotateL(grandfather);
cur->_col = BLACK;
grandfather->_col = RED;
}
break;
}
}
}
//始终保持根为黑
_root->_col = BLACK;
return make_pair(Iterator(newnode), true);
}
void RotateR(Node* parent)
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
parent->_left = subLR;
if (subLR) //节点可能为空
subLR->_parent = parent;
subL->_right = parent; //旧父节点变成subL的右节点
Node* ppNode = parent->_parent; //该不平衡节点可能不是根节点,所以要找到它的父节点
parent->_parent = subL;
if (parent == _root) //如果该节点是根节点
{
_root = subL;
_root->_parent = nullptr;
}
else //不平衡节点只是一棵子树
{
if (ppNode->_left == parent) //如果旧父节点等于爷爷节点的左节点,新父节点为爷爷节点的左节点
{
ppNode->_left = subL;
}
else
{
ppNode->_right = subL;
}
subL->_parent = ppNode; //新父节点指向爷爷节点。
}
}
void RotateL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL = subR->_left;
parent->_right = subRL;
if (subRL)
subRL->_parent = parent;
subR->_left = parent;
Node* ppNode = parent->_parent;
parent->_parent = subR;
if (parent == _root)
{
_root = subR;
_root->_parent = nullptr;
}
else
{
if (ppNode->_right == parent)
{
ppNode->_right = subR;
}
else
{
ppNode->_left = subR;
}
subR->_parent = ppNode;
}
}
void InOrder()
{
_InOrder(_root);
cout << endl;
}
bool IsBalance()
{
if (_root->_col == RED)
{
return false;
}
int refNum = 0; //取其中一条路径作为参考值
Node* cur = _root;
while (cur)
{
if (cur->_col == BLACK)
{
++refNum;
}
cur = cur->_left;
}
return Check(_root,0,refNum);
}
private:
Node* Copy(Node* root)
{
if (root == nullptr)
return nullptr;
Node* newroot = new Node(root->_data);
newroot->_col = root->_col;
newroot->_left = Copy(root->_left);
if (newroot->_left)
newroot->_left->_parent = newroot;
newroot->_right = Copy(root->_right);
if (newroot->_right)
newroot->_right->_parent = newroot;
return newroot;
}
void Destroy(Node* root)
{
if (root == nullptr)
return;
Destroy(root->_left);
Destroy(root->_right);
delete root;
root = nullptr;
}
bool Check(Node* root,int blackNum,const int refNum)
{
if (root == nullptr)
{
//cout << blackNum << endl;
if (refNum != blackNum)
{
cout << "存在黑色节点数量不相等的路径" << endl;
return false;
}
return true;
}
if (root->_col == RED && root->_parent->_col == RED)
{
cout << root->_kv.first << "存在连续的红色节点" << endl;
return false;
}
if (root->_col == BLACK)
{
blackNum++;
}
return Check(root->_left,blackNum,refNum)
&& Check(root->_right,blackNum, refNum);
}
void _InOrder(Node* root)
{
if (root == nullptr)
return;
_InOrder(root->_left);
cout << root->_kv.first << ":" << root->_kv.second << endl;
_InOrder(root->_right);
}
private:
Node* _root = nullptr;
size_t _size = 0;
};
Set.h
#pragma once
namespace qjh
{
template<class K>
class set
{
struct SetKeyOfT
{
const K& operator()(const K& key)
{
return key;
}
};
public:
//没有实例化的类模板typedef时要加typename,这样编译器就会在实例化后再找这个东西
typedef typename RBTree<K, const K, SetKeyOfT>::Iterator iterator;
typedef typename RBTree<K, const K, SetKeyOfT>::ConstIterator const_iterator;
iterator begin()
{
return _t.Begin();
}
iterator end()
{
return _t.End();
}
const_iterator begin() const
{
return _t.Begin();
}
const_iterator end() const
{
return _t.End();
}
iterator find(const K& key)
{
return _t.Find(key);
}
pair<iterator,bool> insert(const K& key)
{
return _t.Insert(key);
}
private:
RBTree<K, const K, SetKeyOfT> _t; //set迭代器不能修改
};
void PrintSet(const set<int>& s)
{
for (auto e : s)
{
cout << e << endl;
}
}
void test_set()
{
set<int> s;
s.insert(4);
s.insert(2);
s.insert(5);
s.insert(15);
s.insert(7);
s.insert(1);
s.insert(5);
s.insert(7);
PrintSet(s);
set<int>::iterator it = s.begin();
while (it != s.end())
{
//*it += 5;
cout << *it << " ";
++it;
}
cout << endl;
for (auto e : s)
{
cout << e << " ";
}
cout << endl;
set<int> copy = s;
for (auto e : copy)
{
cout << e << " ";
}
cout << endl;
}
}Map.h
#pragma once
namespace qjh
{
template<class K,class V>
class map
{
struct MapKeyOfT
{
const K& operator()(const pair<K, V>& kv)
{
return kv.first;
}
};
public:
//first不能修改,second可以修改
typedef typename RBTree<K, pair<const K, V>, MapKeyOfT>::Iterator iterator;
typedef typename RBTree<K, const pair<const K, V>, MapKeyOfT>::ConstIterator const_iterator;
const_iterator begin() const
{
return _t.Begin();
}
const_iterator end() const
{
return _t.End();
}
iterator begin()
{
return _t.Begin();
}
iterator end()
{
return _t.End();
}
iterator find(const K& key)
{
return _t.Find(key);
}
pair<iterator, bool> insert(const pair<K, V>& kv)
{
return _t.Insert(kv);
}
V& operator[](const K& key)
{
pair<iterator, bool> ret = _t.Insert(make_pair(key, V()));
return ret.first->second;
}
private:
RBTree<K, pair<const K,V>, MapKeyOfT> _t; //first不能修改,second可以修改
};
void test_map1()
{
map<string,int> m;
m.insert({"苹果",1});
m.insert({ "香蕉",1 });
m.insert({ "梨",1 });
m.insert({ "苹果",3 });
map<string, int>::iterator it = m.begin();
while (it != m.end())
{
//it->first += 'x';
it->second += 1;
//cout << it.operator->()->first << ":" << it->second << endl;
cout << it->first << ":" << it->second << endl;
++it;
}
cout << endl;
}
void test_map2()
{
string arr[] = { "苹果","西瓜","苹果","西瓜","苹果","苹果","西瓜",
"苹果","香蕉","苹果","香蕉","苹果","草莓","苹果","草莓" };
map<string, int> countmap;
for (auto& e : arr)
{
countmap[e]++;
}
for (auto& kv : countmap)
{
cout << kv.first << ":" << kv.second << endl;
}
cout << endl;
}
}















 826
826

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











