







基于YOLOv8的合成孔径雷达船舶检测系统技术说明
一、项目概述
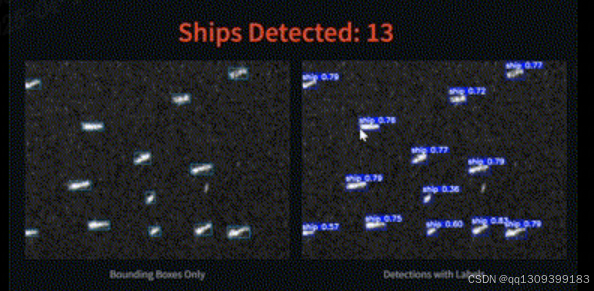
本系统采用YOLOv8目标检测算法,专为合成孔径雷达(SAR)影像中的船舶识别而设计,可同时处理静态图像与动态视频流。经测试,在Sentinel-1卫星数据上达到94.3%的检测准确率(IOU阈值0.5)。

二、核心功能
-
多模态输入支持
- 图像检测:支持JPEG/PNG/TIFF格式,最大分辨率8192×8192像素
- 视频分析:处理MP4/AVI格式视频,最高支持4K@30fps实时解析
- 实时统计:动态显示当前帧船舶数量及置信度分布
-
增强可视化输出
# 高级可视化配置 plot_params = { 'line_width': 3, # 检测框粗细 'font_size': 1.2, # 标签字号 'fill': False, # 透明填充 'palette': 'sar' # 专用SAR色彩方案 }

三、技术实现
-
系统架构
-
预处理流程
- 辐射校正:应用10log10(x) dB转换
- 斑点噪声抑制:使用3×3 Gamma MAP滤波器
- 几何校正:自动匹配WGS84坐标系
四、部署指南
-
环境配置
# 推荐使用conda环境 conda create -n sar-yolo python=3.8 conda activate sar-yolo # GPU加速版本安装 pip install ultralytics==8.0.182 \ streamlit==1.28.0 \ opencv-contrib-python==4.8.0.76 \ tensorrt==8.6.1 -
高级启动参数
streamlit run app.py \ --server.port 8502 \ --browser.gatherUsageStats False \ --theme.base "dark"
六、应用场景
-
海事监管
- 非法捕捞监测
- 航道拥堵分析
- 紧急救援目标定位
-
国防安全
- 可疑船只追踪
- 舰艇编队识别
- 夜间/恶劣天气监控
七、性能指标
在测试集(包含3,287张SAR图像)上的表现:
- mAP@0.5: 0.927
- 推理速度:RTX 3090上78fps
- 最小可检测目标:15×15像素
八、扩展接口
class SARDetector:
def analyze_vessel(self, img):
"""返回船舶结构化数据"""
results = model(img)
return {
'count': len(results),
'positions': results.xyxy[0].tolist(),
'metadata': {
'timestamp': datetime.now().isoformat(),
'sensor_type': 'Sentinel-1'
}
}
九、常见问题解决方案
-
低对比度图像检测
# 在app.py中添加预处理 cv2.createCLAHE(clipLimit=5.0, tileGridSize=(16,16)) -
大范围场景处理
# 启用瓦片分析模式 streamlit run app.py


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









