






现在的单反相机基本都不带gps,如果要给照片添加gps信息,需要一直开着官方的app,非常耗电,出去拍照,可能忘记打开app,或者手机电量不够都可能导致照片没有位置信息。
个人整理照片的时候,喜欢在手机的相册里通过位置找照片:

所以我就想把单反没有gps信息的照片手工补上gps信息。
在网上找了很多方法,大部分都很老,或者补上的gps 信息会位置偏移,就自己研究了一下:
--------------------------------------------------------------------------------------------------------------
思路这样:把没有位置信息的照片单独放一个文件夹(拷贝的副本,保持备份的习惯),
然后到地图拾取经纬度,然后填到照片的源数据。
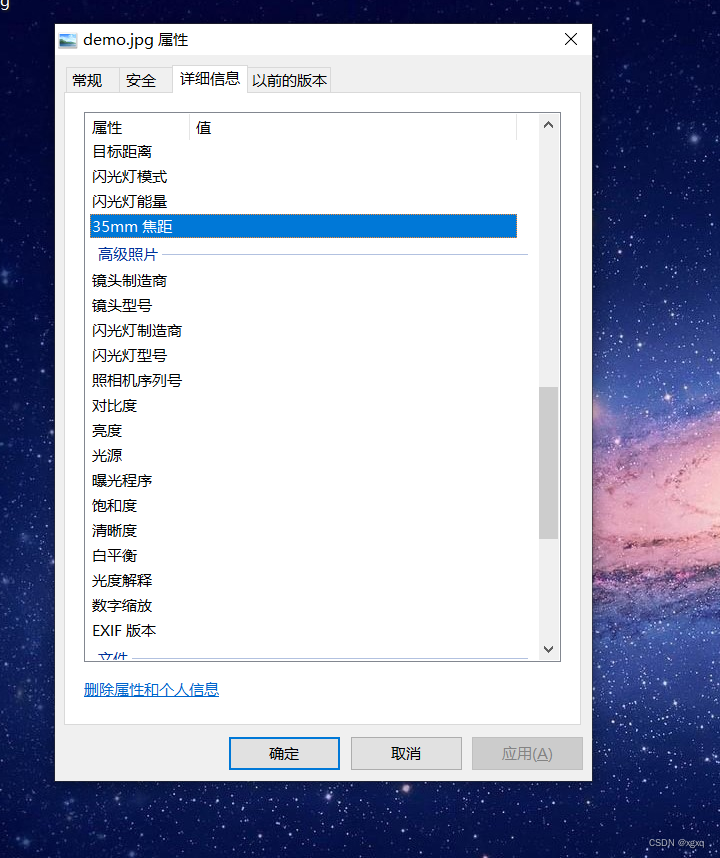
1.准备一张照片
(建议先备份一下),我随便找了张壁纸

右键可以看到没有任何的位置信息
2.拾取坐标
到这个地址去直接拾取国际WGS84坐标
GPS工具箱管理 https://web.gpstool.com/index
https://web.gpstool.com/index
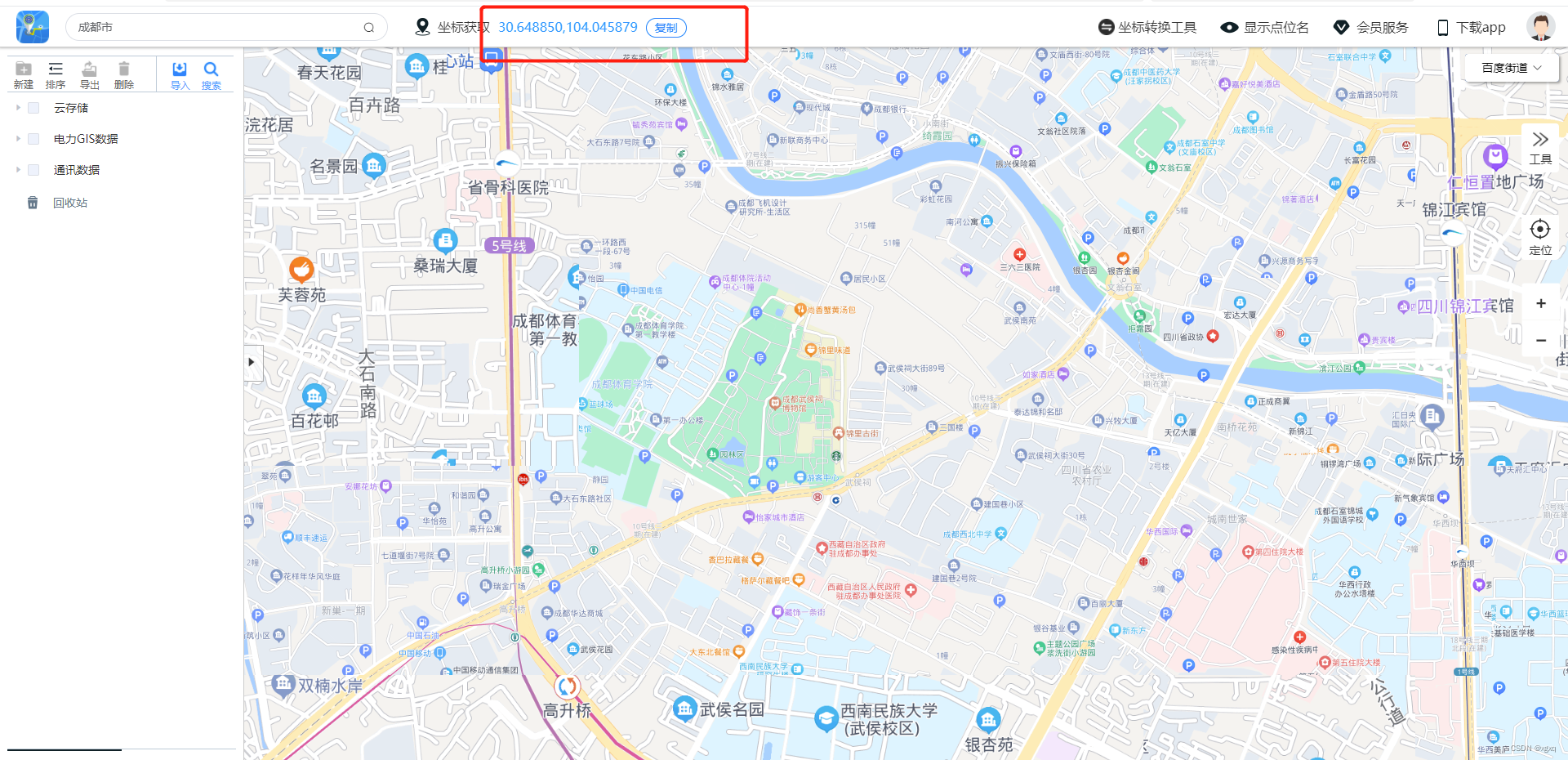
点击一个点,把这个点的经纬度记下来,
30.648850,104.0458793.用python程序添加gps信息
然后用以下python代码
或者直接使用我打包好的exe程序。
阿里云盘分享 https://www.aliyundrive.com/s/vxENXi63yDE提取码 35ob
https://www.aliyundrive.com/s/vxENXi63yDE提取码 35ob
# ecoding:utf-8
import os
from PIL import Image
import piexif
import win32con
import win32ui
import ctypes
"""
安装第三方包
pip install piexif
pip install pywin32
pip install Pillow
pip install pyinstaller
打包命令:pyinstaller -F -i .\gps.ico .\gps.py
"""
# DIP缩放设置
awareness = ctypes.c_int()
errorCode = ctypes.windll.shcore.GetProcessDpiAwareness(0, ctypes.byref(awareness))
errorCode = ctypes.windll.shcore.SetProcessDpiAwareness(2)
success = ctypes.windll.user32.SetProcessDPIAware()
def main():
image_path = browse(True)[1]
gps_str = input('请输入经纬度:')
arr = gps_str.split(',')
lng = float(arr[1])
lat = float(arr[0])
# 将经纬度与相对航高转为exif可用的经纬度与行高
# exif需要的航高输入为(20000,2)格式,表示高度为20000/100米
# exif需要的经度与维度为((12, 1), (20,1), (41000, 1000))格式表示12度20分41秒
lng_exif = format_latlng(lng)
lat_exif = format_latlng(lat)
_dict = {"lng": lng_exif, "lat": lat_exif, "lng_ref": 'E', "lat_ref": 'N'}
print("写入文件:", image_path)
# 判断图片是否有exif
read_check_exif(image_path)
# 修改图片的exif
read_modify_exif(image_path, _dict)
def browse(mode: bool,
default_name: str = "",
title: str = "选择您的文件",
file_type: str = "图片文件(*.jpg)|*.jpg|",
path: str = "desktop"):
"""弹出窗口返回保存或者选择的路径
:param mode: False"为 "保存/另存为", "True"为 "打开"
:param default_name:默认输入文件名
:param title:窗口提示
:param file_type:可选的文件类型,所有文件(*.*)|*.*|图片文件(*.jpg)|*.jpg|
:param path:
:return:[存储类型、文件路径、文件类型]
"""
api_flag = win32con.OFN_OVERWRITEPROMPT | win32con.OFN_FILEMUSTEXIST
dlg = win32ui.CreateFileDialog(mode, None, default_name, api_flag, file_type)
dlg.SetOFNTitle(title)
dlg.SetOFNInitialDir(os.path.abspath(path))
dlg.DoModal()
filename = dlg.GetPathName()
fileExt = dlg.GetFileExt()
if os.path.exists(filename):
if_pass = True
elif not mode:
if os.path.split(filename)[0] == '':
if_pass = False
else:
if_pass = True
else:
if_pass = False
return [if_pass, filename, fileExt]
def format_latlng(latlng):
"""经纬度十进制转为分秒"""
degree = int(latlng)
res_degree = latlng - degree
minute = int(res_degree * 60)
res_minute = res_degree * 60 - minute
seconds = round(res_minute * 60.0, 3)
return ((degree, 1), (minute, 1), (int(seconds * 1000), 1000))
def read_check_exif(image_path):
"""
判断图片是否有'exif'信息,没有就写入初始'exif'信息
:param image_path:图片路径
:return:无
"""
img = Image.open(image_path) # 读图
try:
exif_dict = piexif.load(img.info['exif']) # 提取exif信息
except KeyError:
# 处理exif不存在的情况
# 创建一个初始的EXIF字典
exif_dict = {"0th": {}, "Exif": {}, "GPS": {}, "Interop": {}, "1st": {}, "thumbnail": None}
# 将EXIF字典添加到图像的元数据中
exif_bytes = piexif.dump(exif_dict)
img.save(image_path, exif=exif_bytes)
def read_modify_exif(image_path, _dict):
""" 读取并且修改exif文件"""
img = Image.open(image_path) # 读图
exif_dict = piexif.load(img.info['exif']) # 提取exif信息
exif_dict['GPS'][piexif.GPSIFD.GPSLongitude] = _dict['lng'] # 修改经度
exif_dict['GPS'][piexif.GPSIFD.GPSLatitude] = _dict['lat'] # 修改纬度
exif_dict['GPS'][piexif.GPSIFD.GPSLongitudeRef] = _dict['lng_ref'] # odm需要读取,一般为’W'
exif_dict['GPS'][piexif.GPSIFD.GPSLatitudeRef] = _dict['lat_ref'] # 一般为‘N'
exif_bytes = piexif.dump(exif_dict)
piexif.insert(exif_bytes, image_path)
if __name__ == "__main__":
main()
把python代码保存到本地py文件
运行前得先安装依赖的第三方包:
pip install piexif
pip install pywin32
pip install Pillow
pip install pyinstaller
python第三方包安装后,双击执行py文件会提示选择一个图片文件,我选择之前准备的图片文件。
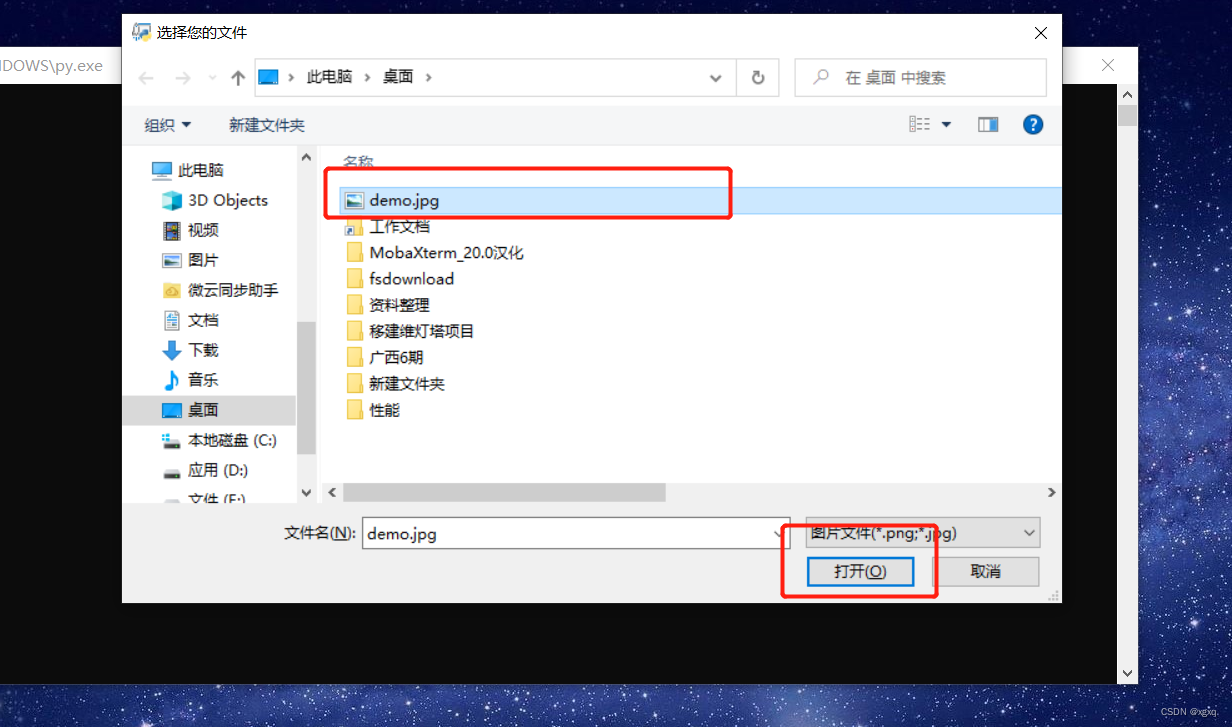
然后会提示输入经纬度,则把上面准备的坐标输入回车即可。
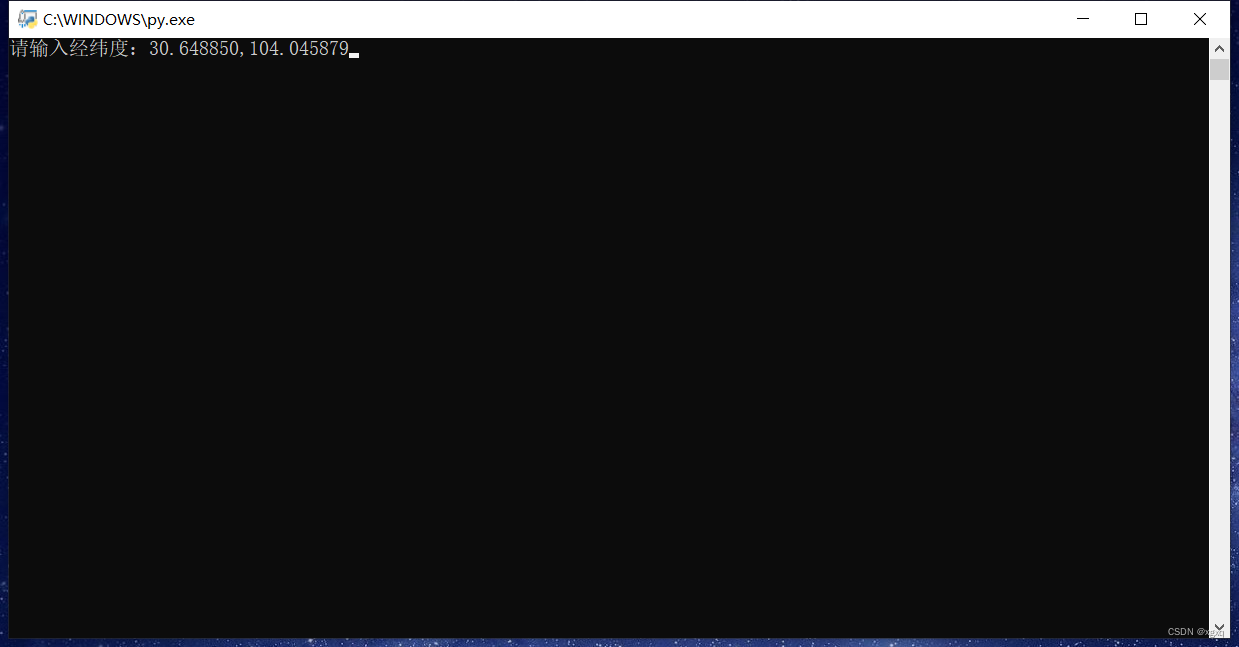
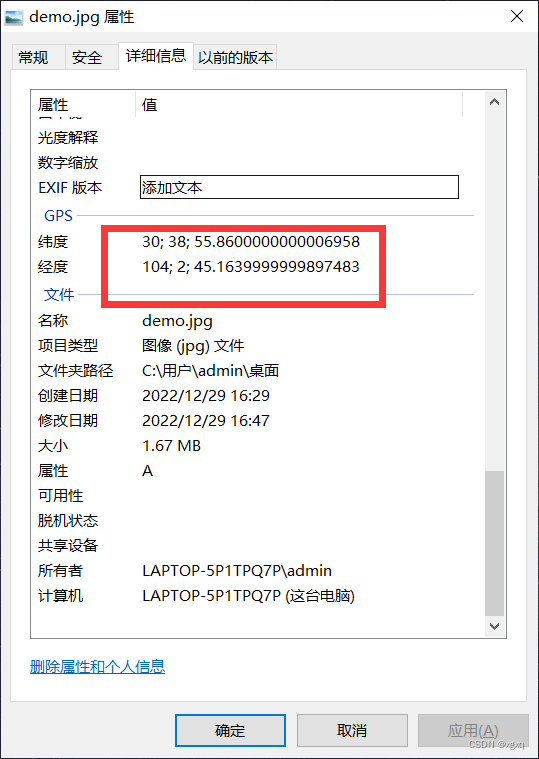
然后图片就有经纬度信息了
可以用这个网站来看看位置信息
在线查看图片Exif信息_定位信息_GPS信息 - StrErr.com查看图片Exif信息 https://www.strerr.com/cn/exif.html
https://www.strerr.com/cn/exif.html
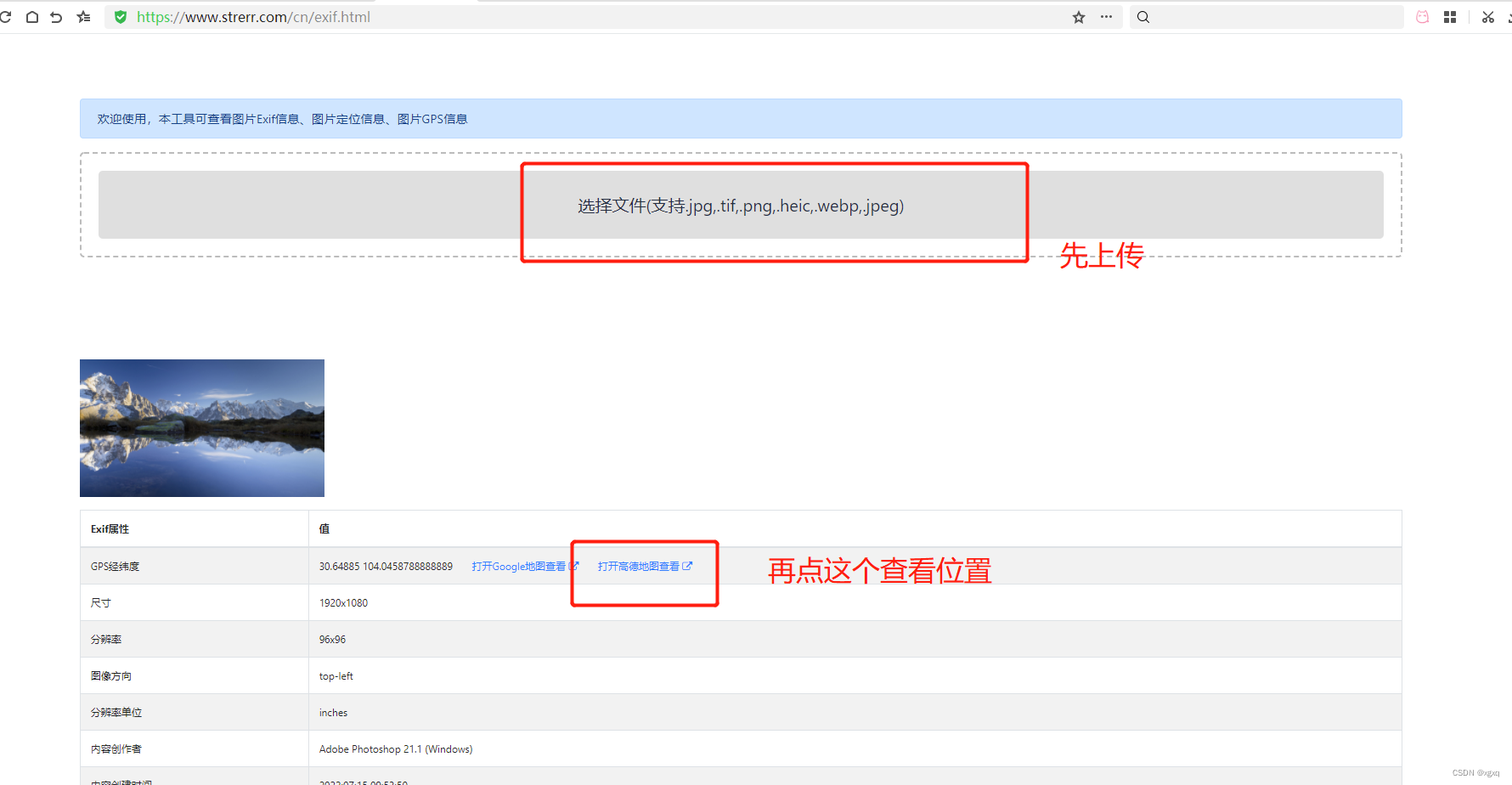
然后就成功啦

这种方法有弊端,位置信息全靠记忆,比较麻烦,后期文章更新通过轨迹信息批量给照片添加位置信息的方法。

















 1423
1423

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









