






一、 项目场景
视觉检测机械抄表技术广泛应用于以下场景:
居民住宅区 :大量老旧住宅仍在使用传统机械电表和水表,人工抄表效率低且易出错。通过视觉检测技术,可实现对这些仪表的自动抄表,提高抄表效率和准确性。

老旧居民楼人工抄表图
工业生产场所 :工厂设备上安装的机械仪表,如压力表、流量表等,需要定期读取数据以监控设备运行状态。视觉检测技术可在不影响正常生产的情况下,自动采集仪表数据,保障生产安全。

工业生产场所需要定期读取仪器表图
商业建筑 :商业建筑中的水、电等能源计量仪表数量多且分布广,传统抄表方式难以高效管理。视觉检测技术可实现远程抄表和数据实时传输,便于能源管理和成本控制。

各个场景中的水,点能源计量表图
二、项目方向
| 项目预期 | 描述 |
| 目的 | 利用计算机视觉技术和图像处理算法,实现对传统机械电表、水表等仪表数据的自动识别与记录,替代人工抄表。 |
| 提高抄表 效率 | 自动化的抄表系统能够在短时间内完成大量仪表的读数采集,大大减少人工抄表所需的时间和人力成本。 |
| 提升抄表 准确性 | 避免人工抄表可能出现的漏抄、估抄、错抄等问题,确保抄表数据的准确性和可靠性。 |
| 实现远程监控与数据分析 | 抄表数据可实时传输到远程服务器,便于管理人员进行远程监控和数据分析,及时发现异常情况并采取措施。 |
| 降低维护 成本 | 无需对现有的机械仪表进行大规模更换,只需在仪表上安装视觉检测设备,即可实现智能化抄表。 |
三、项目技术流程
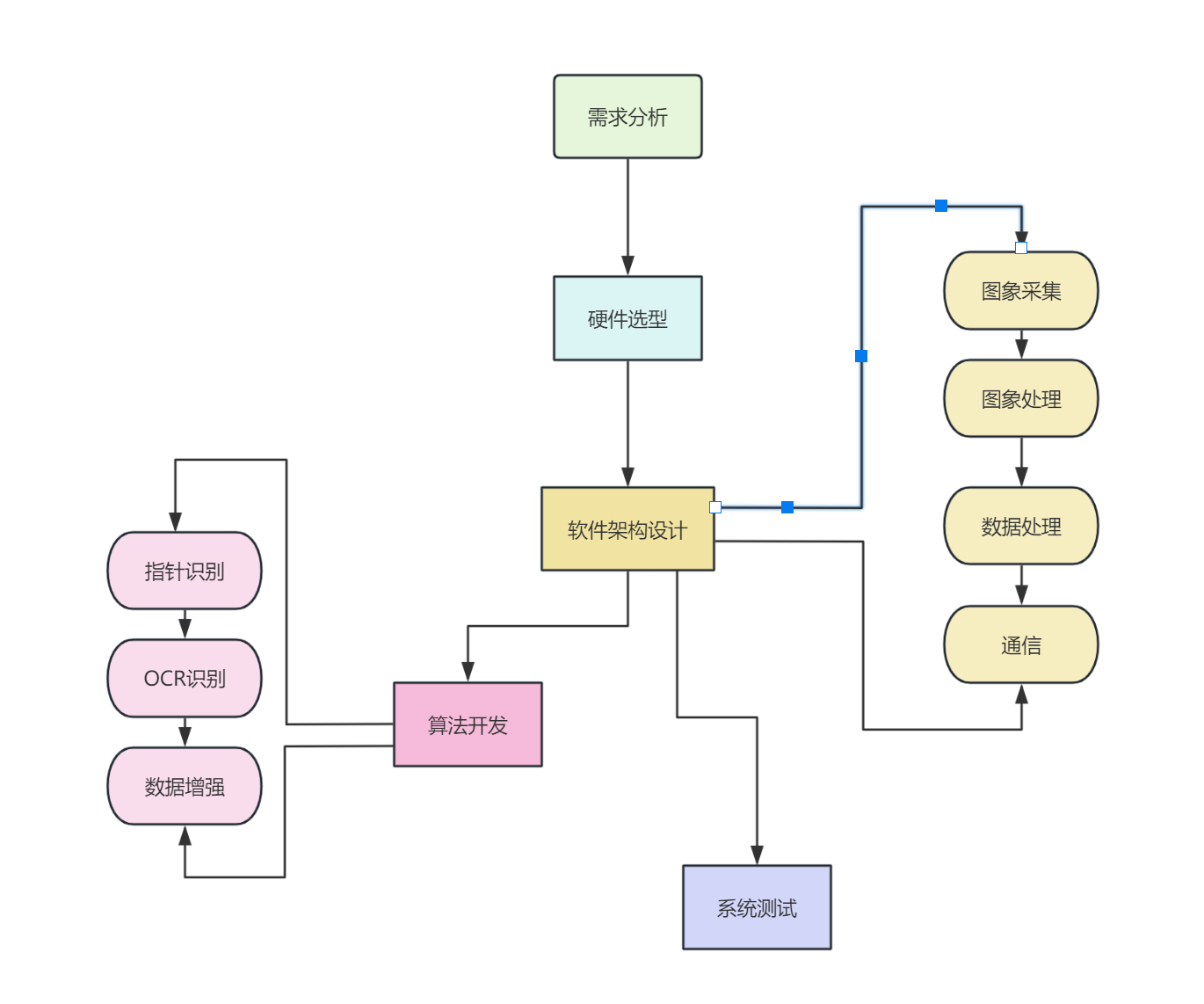
3.1 设计方案
需求分析 :深入调研不同场景下机械抄表的需求,包括居民住宅区、工业生产场所和商业建筑等,明确抄表的精度要求、环境条件、数据传输方式等。
硬件选型 :根据需求分析结果,选择合适的硬件设备。例如,选用高分辨率、低功耗的摄像头作为图像采集设备,确保图像清晰度和分辨率满足识别要求;配备稳定的光源,如LED补光灯,以减少环境光照对图像质量的影响;选择具备足够计算能力和存储容量的边缘计算设备,用于图像预处理和初步识别。
软件架构设计 :采用分层架构设计,包括图像采集层、图像处理层、数据处理层和通信层。
图像采集层 :负责获取仪表图像,并将其传输到图像处理层。
图像处理层 :对图像进行预处理、特征提取和目标检测,提取出仪表区域和读数信息。
数据处理层 :对识别结果进行校验和存储,并将数据传输到通信层。
通信层 :负责将抄表数据传输到远程服务器,支持多种通信方式,如4G、Wi-Fi等。
算法开发与训练 :针对指针式仪表和数字式仪表,分别开发相应的图像处理和识别算法。对于指针式仪表,采用机器视觉技术确定指针的位置和角度,进而计算出仪表的读数;对于数字式仪表,利用光学字符识别(OCR)技术,如CRNN等,对仪表上的数字进行识别。同时,采用数据增强技术,如随机旋转、缩放等,提高模型的泛化能力。
系统集成与测试 :将硬件设备和软件系统进行集成,搭建完整的视觉检测机械抄表系统。在不同场景下进行实地测试,验证系统的性能和可靠性。根据测试结果,对系统进行优化和调整,确保系统的稳定运行。
辅助理解图
3.2 架构设计
前端架构
| 组成部分 | 功能描述 |
| 水平移动机构 | 调整摄像头的水平位置,确保摄像头能够对准不同水平位置的仪表。 |
| 垂直移动机构 | 调整摄像头的垂直位置,确保摄像头能够对准不同垂直位置的仪表。 |
| LED补光灯 | 在光照不足的环境下提供稳定的光源,保证图像质量,提高识别的准确性。 |
| 图像预处理 | 对采集到的图像进行灰度化、二值化、降噪等操作,减少噪声,提高图像质量。 |
| 特征提取 | 提取图像中的关键特征,如仪表的指针位置、数字字符等,为后续识别做准备。 |
| 数据压缩与传输 | 将处理后的数据进行压缩,减少数据传输量,提高数据传输效率。 |
后端架构
| 组成部分 | 功能描述 |
| 数据接收与解析 | 接收前端设备传输的数据,解析数据格式,确保数据的完整性和读性。 |
| 数据校验 | 对抄表数据进行校验,如检查数据范围、数据格式等,确保数据的准确性。 |
| 异常检测 | 检测数据中的异常情况,如数据突变、数据缺失等,及时发现潜在问题。 |
| 数据处理与存储 | 对校验后的数据进行处理,如数据转换、统计分析等,并将数据存储到数据库中。 |
| 数据存储 | 存储抄表数据、仪表信息、抄表时间等,确保数据的持久化。 |
| 数据查询与检索 | 提供数据查询功能,支持按时间、仪表编号、抄表地点等条件进行数据检索。 |
| 数据统计与分析 | 对存储的数据进行统计分析,如能耗统计、仪表使用情况分析等,为能源管理提供依据。 |
| 能源管理系统集成 | 将抄表数据传输至能源管理系统,支持能源消耗的实时监控和分析。 |
| 物业管理系统集成 | 与物业管理系统对接,实现抄表数据的自动录入和管理,提高物业管理效率。 |
四、技术方案
(一)图像采集模块
采用高分辨率工业级摄像头作为图像采集单元,确保对机械仪表的图像采集具备足够的细节与清晰度,以满足后续高精度识别需求。针对复杂多变的现场环境光照条件,配备智能LED补光系统,通过自动调节光强与光谱,优化图像的亮度与对比度,为图像预处理环节提供高质量的原始图像数据。同时,引入多视角采集机制,通过多个摄像头从不同角度对仪表进行拍摄,形成多维度图像数据,为后续的三维重建与复杂场景下的仪表识别提供基础数据支持。
(二)图像预处理模块
运用先进的图像处理算法对采集到的图像进行深度预处理。首先,采用自适应灰度化算法,根据图像的局部特征动态调整灰度化参数,最大限度地保留图像中的关键信息。接着,利用基于小波变换的多尺度降噪算法,有效去除图像中的随机噪声与高频干扰,同时保留图像的边缘与纹理细节。此外,结合几何校正算法对图像进行畸变校正,消除因摄像头镜头畸变或拍摄角度偏差导致的图像变形,确保图像中的仪表区域形状规整,为后续的目标检测与定位提供准确的图像基础。
(三)目标检测与定位模块
基于深度学习框架构建目标检测模型,选用优化后的YOLOv5算法作为核心检测算法。通过大规模标注数据集对模型进行训练,使其能够精准识别各类机械仪表的轮廓与位置。在模型训练过程中,引入迁移学习机制,利用预训练模型在类似任务上的学习成果,加速模型的收敛速度并提升检测精度。同时,采用非极大值抑制(NMS)算法对检测结果进行优化,去除冗余的检测框,确保每个仪表区域仅对应一个精确的定位框。此外,结合图像分割技术对仪表区域进行像素级分割,进一步细化仪表的边界,为读数识别模块提供更精准的区域定位信息。
- 读数识别模块
表1:指针式仪表读数识别模块
| 组成部分 | 技术/方法 | 实现细节 |
| 指针检测 | 霍夫变换检测算法 | 精确提取指针的直线特征,确定位置与方向 |
| 刻度线识别 | 基于极坐标变换的检测算法 | 识别刻度线位置与角度分布,结合仪表量程、最小刻度值等先验知识 |
| 读数计算 | 几何关系分析 (三角函数+插值算法) | 根据指针与刻度线的几何关系推导精确读数 |
| 辅助校正 | 卷积神经网络(CNN) 特征融合与校正 | 对指针和刻度线提取结果进行深度学习辅助优化,提升鲁棒性 |
表2:数字式仪表读数识别模块
| 组成部分 | 技术/方法 | 实现细节 |
| 核心模型 | CRNN (卷积循环神经网络) | 结合CNN特征提取与RNN序列建模能力,优化OCR识别 |
| 数据训练 | 数据增强技术 | 随机旋转、缩放、扭曲、颜色抖动等,扩充数据集规模 |
| 注意力机制 | Attention Mechanism | 聚焦关键数字字符区域,提升识别效率 |
| 后处理优化 | 语言模型校验与纠错 | 对OCR结果进行语义校验(如合理数值范围判断) |
(五)数据处理与校验模块
建立完善的数据处理与校验流程,确保抄表数据的准确性和可靠性。首先,对识别出的读数进行数据格式化处理,统一数据格式以满足后续存储与传输要求。接着,采用基于统计学原理的异常检测算法,如均值滤波、中值滤波、Z-Score检测等,对读数数据进行实时监测与分析,及时发现并剔除异常值。同时,结合仪表的历史数据与运行规律,建立数据校验模型,通过对比当前读数与历史数据的趋势一致性、数据范围合理性等指标,对读数进行二次校验,进一步确保数据的准确性。此外,引入数据融合技术,对多视角采集的仪表读数数据进行融合处理,通过加权平均、投票机制等算法,综合判断仪表的最终读数,进一步提高数据的稳定性和可靠性。
(六)通信与数据传输模块
采用先进的无线通信技术构建稳定高效的数据传输通道。支持多种通信协议,如4G、5G、Wi-Fi、NB-IoT等,根据现场环境与设备需求灵活选择最优通信方式。在数据传输过程中,采用基于TLS/SSL加密协议的数据加密技术,对抄表数据进行高强度加密处理,确保数据在传输过程中的安全性与保密性。同时,引入数据压缩算法,如Huffman编码、LZ77压缩算法等,对传输数据进行高效压缩,降低数据传输量,提高数据传输效率。此外,建立数据传输监控与重传机制,实时监测数据传输状态,对于传输失败或数据丢失的情况,自动触发数据重传流程,确保数据的完整传输。

















 471
471

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









