










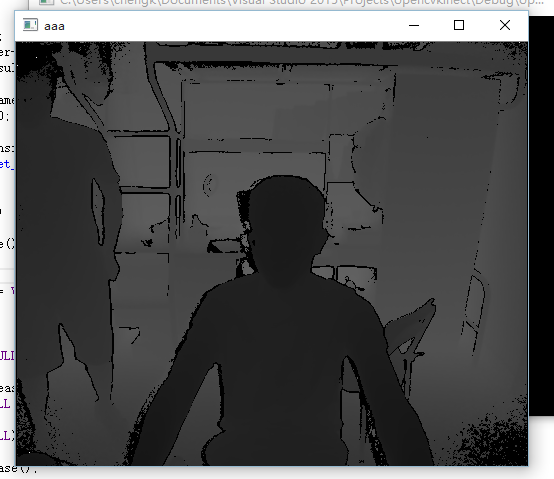
一、景深图
和之前获取彩色图的差不多,就多了一个类型转换
#include "opencv2/core.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/videoio.hpp"
#include <iostream>
#include <Kinect.h>
#pragma comment ( lib, "kinect20.lib" )
using namespace cv;
using namespace std;
int main()
{
HRESULT hResult = S_OK;
IKinectSensor *kinect;
GetDefaultKinectSensor(&kinect);
kinect->Open();
IDepthFrameSource *depthrsource;
IDepthFrameReader *depthreader;
IFrameDescription *depthde;
kinect->get_DepthFrameSource(&depthrsource);
depthrsource->OpenReader(&depthreader);
depthrsource->get_FrameDescription(&depthde);
int width = 0;
int height = 0;
depthde->get_Height(&height);
depthde->get_Width(&width);
Mat a(height, width, CV_8UC1);
namedWindow("aaa");
UINT16 *data = new UINT16[width*height];
while (1)
{
IDepthFrame*frame;
hResult=depthreader->AcquireLatestFrame(&frame);
if (SUCCEEDED(hResult))
{
frame->CopyFrameDataToArray(height*width, data);
for (int i = 0; i < width*height; i++)
{
byte intensity = (byte)(data[i]>>5); //类型的转换,data内的值即为距离
reinterpret_cast<BYTE*>(a.data)[i] = intensity;
}
}
if (frame != NULL)
{
frame->Release();
frame = NULL;
}
if (waitKey(30) == VK_ESCAPE)
break;
imshow("aaa", a);
}
if (depthrsource != NULL)
{
depthrsource->Release();
depthrsource = NULL;
}
if (depthreader != NULL)
{
depthreader->Release();
depthreader = NULL;
}
if (depthde != NULL)
{
depthde->Release();
depthde = NULL;
}
if (kinect)
{
kinect->Close();
}
if (kinect != NULL)
{
kinect->Release();
kinect = NULL;
}
destroyAllWindows();
}
运行图:
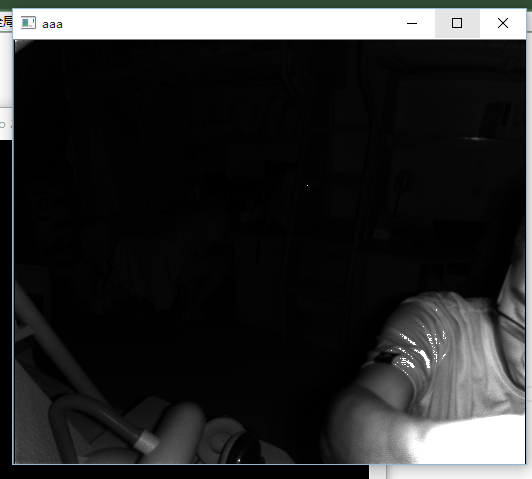
二、红外图
同样,只是修改下类型就可以了
#include "opencv2/core.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/videoio.hpp"
#include <iostream>
#include <Kinect.h>
#pragma comment ( lib, "kinect20.lib" )
using namespace cv;
using namespace std;
int main()
{
HRESULT hResult = S_OK;
IKinectSensor *kinect;
GetDefaultKinectSensor(&kinect);
kinect->Open();
IInfraredFrameSource *irsource;
IInfraredFrameReader *irreader;
IFrameDescription *irde;
kinect->get_InfraredFrameSource(&irsource);
irsource->OpenReader(&irreader);
irsource->get_FrameDescription(&irde);
int width = 0;
int height = 0;
irde->get_Height(&height);
irde->get_Width(&width);
Mat a(height, width, CV_8UC1);
namedWindow("aaa");
UINT16 *data = new UINT16[width*height];
while (1)
{
IInfraredFrame*frame;
hResult=irreader->AcquireLatestFrame(&frame);
if (SUCCEEDED(hResult))
{
frame->CopyFrameDataToArray(height*width, data);
for (int i = 0; i < width*height; i++)
{
byte intensity = (byte)(data[i]>>8); //类型的转换
reinterpret_cast<BYTE*>(a.data)[i] = intensity;
}
}
if (frame != NULL)
{
frame->Release();
frame = NULL;
}
if (waitKey(30) == VK_ESCAPE)
break;
imshow("aaa", a);
}
if (irsource != NULL)
{
irsource->Release();
irsource = NULL;
}
if (irreader != NULL)
{
irreader->Release();
irreader = NULL;
}
if (irde != NULL)
{
irde->Release();
irde = NULL;
}
if (kinect)
{
kinect->Close();
}
if (kinect != NULL)
{
kinect->Release();
kinect = NULL;
}
destroyAllWindows();
}
运行图:
















 217
217

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











