






该方法是基于局部对比度的。采用Lab颜色空间计算距离。详细算法见原文点击打开链接
感知单元:一个像素或一个像素块。
AC算法通过计算一个感知单元在不同邻域上的局部对比度来实现多尺度显著性计算。内部区域R1,外部区域R2,计算R1和R2的局部对比度时,通过改变R2的大小实现多尺度显著性计算。
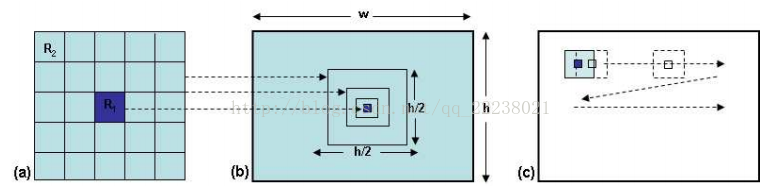
感知单元R1可以是一个像素或一个像素块,其邻域为R2,(R1)R2所包含的所有像素的特征值的平均值作为(R1)R2的特征值。设像素p为R1和R2的中心,p所在位置局部对比度为:

该方法是基于局部对比度的。采用Lab颜色空间计算距离。详细算法见原文点击打开链接
感知单元:一个像素或一个像素块。
AC算法通过计算一个感知单元在不同邻域上的局部对比度来实现多尺度显著性计算。内部区域R1,外部区域R2,计算R1和R2的局部对比度时,通过改变R2的大小实现多尺度显著性计算。
感知单元R1可以是一个像素或一个像素块,其邻域为R2,(R1)R2所包含的所有像素的特征值的平均值作为(R1)R2的特征值。设像素p为R1和R2的中心,p所在位置局部对比度为:
 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















