






《Advances and Challenges in Foundation Agents》是由来自全球19个研究机构的专家共同撰写的综述论文,于2025年3月31日发布在arXiv平台上。原始论文有264页,我们将拆分为两篇文章来介绍。
论文小结
一、大型语言模型(LLMs)驱动的智能体变革
1. LLMs的核心作用
大型语言模型(如GPT-4、LLaMA等)凭借其强大的自然语言理解与生成能力,成为智能体的“认知引擎”。LLMs不仅提供基础的语言推理功能,还能通过插件机制整合感知(如图像、语音)、行动(如工具调用)等模块,使智能体具备跨模态处理能力。例如,通过LLMs的逻辑推理能力,智能体可规划复杂任务(如医疗诊断、机器人操控),并通过记忆模块存储历史经验以优化决策。
2. 智能体的多领域应用
-
工业领域:智能体可用于自动化生产线的故障诊断与流程优化(如通过视觉感知模块识别设备异常)。
-
医疗领域:结合医学知识库与图像识别,智能体可辅助医生分析医学影像并生成诊断建议。
-
社会交互:生成式智能体(如Meta的Generative Agents)能模拟人类行为,用于虚拟社交场景或城市规划仿真。
二、智能体的模块化架构:模拟人类大脑功能
论文提出以“类脑模块化”为核心的智能体架构,将认知过程拆解为多个功能模块,每个模块对应大脑的特定区域或功能:
1. 认知模块(Cognition)
-
类比大脑区域:前额叶皮层(负责高级推理、规划)。
-
核心功能:
-
逻辑推理:通过链式思维(Chain-of-Thought, CoT)、树状思维(Tree-of-Thoughts, ToT)等技术分解复杂问题。
-
规划与决策:结合世界模型(World Model)预测行动后果,如通过强化学习(RL)优化策略。
-
元认知:通过反思机制(Reflexion)评估自身决策,修正错误(如Self-Refine的迭代优化)。
-
2. 记忆系统(Memory)
-
类比大脑区域:海马体(短期记忆)与大脑皮层(长期记忆)。
-
层次结构:
-
短期记忆:处理当前任务的上下文信息(如对话历史),典型模型包括MemGPT、KARMA。
-
长期记忆:存储经验性知识(如事实、技能),支持跨任务迁移学习,例如通过Retrieval-Augmented Generation(RAG)技术整合外部知识库。
-
记忆管理:涉及记忆的压缩(如HiAgent)、遗忘(如Selective Forgetting)和检索优化(如HippoRAG的索引技术)。
-
3. 世界模型(World Model)
-
类比大脑区域:顶叶(空间感知)与运动皮层(行动规划)。
-
功能与技术:
-
环境建模:通过物理引擎(如SAPIEN)或机器学习(如Diffusion WM)模拟现实世界动态。
-
预测与反事实推理:帮助智能体预判行动结果(如Dreamer模型通过潜在想象优化控制策略)。
-
多智能体交互建模:分析其他智能体的行为模式,实现协作或竞争场景下的策略优化(如MuZero在棋类游戏中的应用)。
-
4. 奖励与价值系统(Reward & Value)
-
类比大脑区域:多巴胺系统(奖励反馈)与前额叶(价值观形成)。
-
关键技术:
-
外在奖励:基于人类反馈的强化学习(RLHF)、直接偏好优化(DPO)等,确保智能体行为符合人类预期。
-
内在奖励:好奇心驱动探索(Curiosity-Driven Reward)、能力提升激励(Competence-Based Reward),如通过信息增益(Information Gain)鼓励智能体主动学习新技能。
-
5. 情感与动机系统(Emotion & Motivation)
-
类比大脑区域:边缘系统(情绪处理)与杏仁核(动机驱动)。
-
研究意义:
-
情绪作为启发式工具:快速评估环境风险(如恐惧反应对应潜在威胁),提升决策效率。
-
动机建模:设计内在驱动力(如探索未知、社会合作),避免智能体陷入“目标漂移”(Goal Misalignment)。
-
三、智能体的自我增强与进化机制
1. 自动化优化范式
-
AutoML与LLM驱动优化:
-
通过LLMs生成优化策略(如Prompt优化、参数调整),例如GPTSwarm通过图神经网络优化多智能体协作流程。
-
案例:RT-1/RT-2机器人模型通过大规模视频数据预训练,自动学习物体操作技能。
-
2. 持续学习与适应
-
在线学习:智能体在与环境交互中实时更新模型(如ReAct的推理-行动循环)。
-
离线学习:利用历史数据批量优化策略(如RLFP通过基础先验知识加速强化学习)。
-
跨模态迁移:通过视觉-语言-行动(VLA)模型(如PaLM-E)将网络知识迁移至物理机器人控制。
3. 多智能体协同进化
-
集体智能涌现:
-
分工与合作:如MetaGPT的软件开发多智能体系统,不同角色智能体(架构师、程序员)协作完成复杂任务。
-
竞争与对抗:在游戏场景中(如StarCraft II的SwarmBrain),智能体通过对抗性训练提升策略多样性。
-
-
社会结构模拟:借鉴人类社会的规范与协作机制(如Welfare Diplomacy模型模拟外交决策),设计智能体交互协议(如MCP、Agora)。
四、安全、伦理与社会影响
1. 内在安全威胁
-
越狱攻击(Jailbreak):攻击者通过prompt注入绕过安全限制,例如使用“藏头诗”或特殊符号诱导智能体生成有害内容(如DROJ、AutoDAN攻击)。
-
幻觉(Hallucination):智能体生成违背事实的内容,分为知识冲突型(如错误历史事件)和上下文冲突型(如前后回答矛盾),可通过RETRIEVAL-AUGMENTED GENERATION(RAG)或验证链(Chain-of-Verification)缓解。
-
模型中毒:攻击者通过污染训练数据或模型参数植入后门(如BadEdit、Poison-RAG),影响智能体决策的可靠性。
2. 外在安全威胁
-
物理环境风险:自动驾驶汽车遭受LiDAR对抗攻击、机器人被GPS欺骗导致路径规划错误。
-
数字环境风险:智能体在网络交互中泄露隐私(如用户prompt窃取)、被利用发起DDoS攻击或生成虚假信息。
-
多智能体协作风险:智能体间隐秘合谋(Secret Collusion)或传播错误知识(如Misinformation Pollution)。
3. 伦理对齐与缓解策略
-
价值对齐技术:
-
宪法AI(Constitutional AI):通过AI生成的安全规则约束行为(如禁止生成仇恨言论)。
-
可解释性增强:利用注意力可视化、因果推理(如SHAP值)解释智能体决策逻辑,提升透明度。
-
-
鲁棒性设计:
-
对抗性测试:通过红队攻击(如AgentPoison)评估智能体抵御恶意输入的能力。
-
安全沙箱:在隔离环境中验证智能体行为(如ICML 2023的LM-emulated sandbox),防止现实危害。
-
五、项目资源与未来方向
-
GitHub资源:https://github.com/FoundationAgents/awesome-foundation-agents 提供论文合集、开源工具(如AutoManual生成指令手册)和基准测试(如TravelPlanner评估真实世界规划能力)。
-
未来研究方向:
-
类脑智能:融合神经科学成果,开发更接近人类认知的“神经符号智能体”。
-
可持续性:优化智能体的能源效率与计算成本(如TinyGPT-V的轻量化设计)。
-
人机共生:探索智能体在教育、医疗等领域的辅助角色,平衡自动化与人类主导权。
-
总结
该综述构建了智能体研究的跨学科框架,强调从“单一模型优化”转向“模块化系统整合”,并首次将神经科学中的脑区功能类比引入智能体设计。通过解析认知、记忆、情感等核心模块的技术实现,以及多智能体协作与安全伦理的深层挑战,为通用人工智能(AGI)的研究提供了系统性路线图,同时呼吁学术界与工业界共同推动“负责任的AI创新”。
Preface
LLMs的突破与局限:LLMs凭借对自然语言与多模态信息的强大理解、推理和生成能力,彻底改变了人工智能领域。例如,GPT-4能够处理文本、图像等多种信息,实现跨模态关联;通过上下文学习,它能基于少量示例完成新任务。然而,LLMs仍未达到智能体的完整能力标准。以现实应用为例,在制定复杂科研实验计划时,LLMs难以进行全面且合理的规划;在记忆方面,其原生上下文窗口有限,依赖外部存储时容易出现检索误差与幻觉,如在知识问答中给出错误答案。
LLMs与智能体的关系:尽管过去关于智能体和LLMs的研究成果丰富,但将二者结合的全面研究较少。LLMs虽能实现智能体的部分重要能力,像生成简单旅行计划,但面对复杂专业任务规划、长期可靠记忆维持以及现实世界自主行动等方面存在明显不足。因此,可将LLMs比作“引擎”,为智能体提供基础动力,而智能体则是搭载引擎的“汽车、船只和飞机”,需要在此基础上集成感知、行动、记忆等多种功能模块,才能成为完整、实用的系统。
研究核心问题:在“引擎 - 载体”的类比下,研究聚焦于多个关键问题。比如,探究当前LLM技术能为智能体提供的具体能力边界,明确基于现有技术无法实现的功能,像智能体在复杂物理环境中的自主导航与操作;思考除LLM外,还需哪些技术和模块来构建可在现实世界自主行动和交互的完整智能体;分析完全集成的LLM智能体在开发和应用中面临的挑战,如不同模块间的协同问题;探索打造与人类高效协作的智能体所需的额外发展,包括情感理解与交互能力;挖掘基于LLM的智能体易于落地的领域,如客服、内容生成等;同时,预判完全智能的LLM智能体对社会的影响,并探讨应对策略 。
著作架构与目标读者:为解答上述问题,该著作汇聚AI领域前沿研究人员,内容分为四个部分。第一部分对比单个智能体与人类在感知、行动等能力上的差异;第二部分研究智能体的进化能力及其对智能工具的影响;第三部分探讨智能体社会的协作与集体行动;第四部分关注伦理、安全与责任问题。本书受众广泛,涵盖研究人员、学生、政策制定者和从业者,旨在不仅解答现有问题,更激发新的研究思考,吸引更多人投身这一充满潜力的研究领域。
Chapter 1
AI的起源:神话与早期探索
-
古代神话中的智能雏形
-
案例:古希腊神话中的“塔罗斯(Talos)”是一个青铜自动巨人,受神指派守卫岛屿,能自主巡逻和抵御外敌。
-
意义:这类故事反映了人类早期对“人造智能生命”的向往,渴望赋予非生命体以类人的“目标”和“行动能力”。
-
-
文艺复兴时期的技术尝试
-
案例:达·芬奇设计的“人形机器人”,能模仿人类动作(如手臂挥舞、头部转动),虽非真正智能,却是首次将神话想象转化为机械原型的尝试。
-
意义:标志着人类开始用技术手段探索“人造实体的自主性”,为后来的AI奠定了“从想象到实践”的思维基础。
-
AI的科学奠基:从图灵到机器学习
-
图灵测试与智能定义的突破(1950年)
-
核心问题:图灵提出“机器能否思考?”,并设计“图灵测试”——通过对话判断机器是否具备类人智能。
-
革命性:将AI的研究焦点从“机械计算”转向“类人智能的行为表现”,首次为“机器智能”提供了可验证的科学标准。
-
-
AI的技术演进阶段
-
符号系统(早期):依赖预定义逻辑规则(如专家系统),但难以应对复杂现实场景。
-
机器学习(现代):通过数据训练让机器自主学习规律(如神经网络),例如图像识别、自然语言处理。
-
大型语言模型(LLMs):如GPT系列,能理解、推理和生成类人文本,标志着AI在“语言智能”上接近人类水平。
-
现代AI的核心:智能体(Agent)范式
-
智能体的定义与功能
-
本质:不仅是被动处理信息的程序,而是能**感知环境**(如传感器输入)、**自主决策**(基于算法)、**执行行动**(如机器人移动)的主动系统。
-
关键能力:
-
自主性:无需人类实时干预即可完成任务(如自动驾驶汽车)。
-
适应性:在动态环境中调整策略(如智能客服应对不同用户问题)。
-
-
-
智能体的应用领域
-
对话式助手:如Siri、ChatGPT,通过理解自然语言完成任务(如订票、答疑)。
-
具身机器人:如波士顿动力机器人,结合物理实体与智能决策,执行复杂动作(如救援、工业作业)。
-
多智能体系统:多个智能体协作完成目标(如无人机群协同巡检)。
-
总结:从梦想走向现实的逻辑链
-
古代神话:表达人类对“自主智能体”的想象(目标驱动的行动)。
-
文艺复兴:用机械技术模拟人类动作(物理自主性的早期探索)。
-
图灵时代:将“智能”定义为可验证的行为(科学方法论的建立)。
-
机器学习与LLMs:让机器通过数据获得“学习”和“推理”能力(智能的核心突破)。
-
智能体范式:整合感知、决策、行动,使AI从“工具”进化为“自主执行者”(迈向通用智能的关键一步)。
1.1 人工智能智能体的兴起与发展
一、智能体的本质定义与核心能力
定义解析
-
经典定义:智能体是通过**传感器感知环境**、**通过执行器作用于环境**的自主系统(如机器人通过摄像头感知障碍物,通过电机移动规避)。
-
关键属性:
-
自主性:无需人类实时控制(如自动驾驶汽车自主规划路线)。
-
交互性:动态响应环境变化(如智能客服根据用户问题调整回答策略)。
-
目标导向:围绕特定任务行动(如物流机器人以“高效配送”为目标优化路径)。
-
与传统AI的区别
-
传统AI(如早期专家系统)依赖**预编程规则**,只能在固定场景执行单一任务(如医疗诊断系统按预设规则分析病例)。
-
智能体则通过**感知-决策-行动循环**,在开放环境中灵活调整策略(如扫地机器人根据实时障碍物分布改变清扫路径)。
二、智能体的历史演进:从符号系统到行为驱动
第一阶段:符号系统与逻辑推理(20世纪50-80年代)
-
代表案例:纽厄尔和西蒙的“通用问题求解器(GPS)”[4],通过分解逻辑步骤模拟人类解题(如数学证明)。
-
局限:需依赖**结构化环境**(如棋盘游戏)和**明确规则**,无法应对现实中的不确定性(如复杂路况下的驾驶决策)。
第二阶段:行为驱动与实时响应(20世纪80-2000年代)
-
突破点:罗德尼·布鲁克斯的“包容架构”[5]提出**无需全局建模的分层行为设计**。
-
例:机器人通过“避障”“移动”“探索”等底层行为的叠加,实现复杂任务(如火星探测器自主导航),而非依赖预设地图。
-
-
意义:首次证明智能体可通过**局部交互**实现整体目标,奠定了现代移动机器人的基础。
第三阶段:多领域应用与框架成熟(21世纪以来)
-
应用场景:
-
机器人:波士顿动力机器人通过传感器感知地形,实时调整步态(自主性与适应性的典型)。
-
软件系统:多智能体协作模拟交通流量(如多个车辆智能体交互优化城市拥堵)。
-
-
核心价值:成为连接AI理论(如强化学习)与实际场景的桥梁,推动AI从“实验室”走向“现实世界”。
三、大型语言模型(LLMs)如何重塑智能体
从“工具”到“协作伙伴”的质变
-
传统智能体:功能局限于单一领域(如工业机械臂按预设程序抓取零件)。
-
LLM驱动智能体:
-
例:ChatGPT驱动的智能体可理解自然语言指令(如“帮我分析上个月的销售数据并生成报告”),并自主调用数据库查询、图表生成工具完成任务,全程无需人工介入。
-
核心能力:**跨领域推理**(从数据分析到文本生成)、**自然语言交互**(贴近人类沟通习惯)、**动态工具调用**(按需使用API扩展能力)。
-
关键技术突破
-
函数调用(Function Calling):
-
智能体通过LLMs判断是否需要外部工具(如计算、检索),并生成API调用指令。
-
例:用户询问“北京今天的天气如何?”,智能体调用天气API获取数据后整理回答,而非依赖内置知识库。
-
-
少样本/零样本学习:
-
传统智能体需针对每个任务单独训练(如训练一个智能体识别猫,再训练另一个识别狗)。
-
LLM智能体通过泛化能力,仅凭少量示例(甚至无示例)即可完成新任务(如从未训练过“生成诗歌”,仍可根据指令创作)。
-
应用场景拓展
-
办公自动化:智能体自动处理邮件、日程管理、数据报表生成,减少重复性工作。
-
实时协作:在远程会议中,智能体分析讨论内容并自动生成会议纪要、待办事项,辅助团队决策。
-
复杂问题解决:医疗领域,智能体整合患者病历、医学文献、检测数据,辅助医生制定个性化治疗方案。
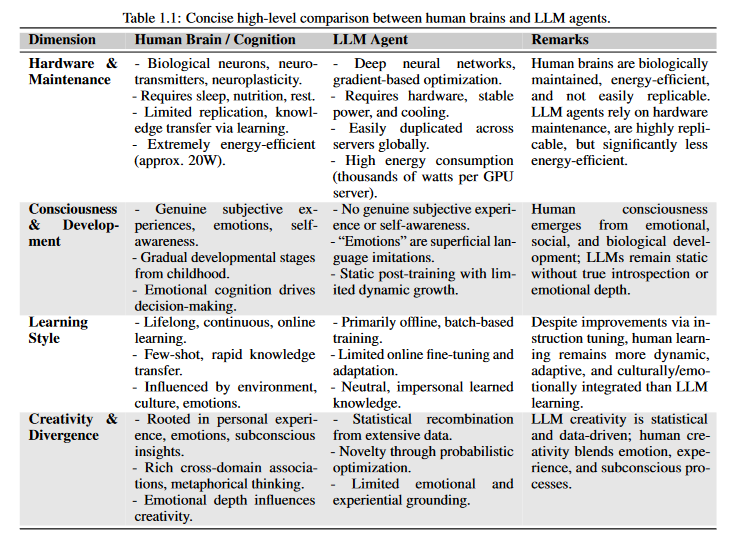
1.2 人类大脑与人工智能智能体的对比分析
一、核心对比维度与差异解析
1. 底层“硬件”与能源效率
-
人类大脑
-
生物基础:以神经元和突触构成的神经网络为硬件,仅需约20瓦功率(相当于台灯),代谢成本极低。
-
能效优势:通过数百万年进化优化,实现“低能耗高智能”,如婴儿通过少量观察即可快速学习语言和认知物体。
-
-
AI智能体
-
电子基础:依赖GPU/TPU等算力集群,能耗极高。例如,训练GPT-4的碳足迹相当于汽车行驶数万公里。
-
现存挑战:计算资源消耗与智能产出不成比例,制约大规模应用(如边缘设备部署)。
-
-
对比启示:模仿大脑神经形态的低功耗计算(如类脑芯片)是未来AI能效突破的关键方向。
2. 意识与情感体验
-
人类大脑
-
主观能动性:具备自我意识、情感体验(如恐惧、共情),深刻影响决策逻辑。例如,医生诊断时需结合患者情感状态调整方案。
-
社会属性:情感驱动社交互动、伦理判断(如道德抉择中的“同情”因素)。
-
-
AI智能体
-
无意识机制:基于数据模式的算法响应,无真实主观感受。例如,聊天机器人的“情感化回复”是预设规则或统计模拟的结果。
-
伦理风险:缺乏情感导致决策可能忽视社会伦理维度(如隐私保护中的“人性化考量”)。
-
-
对比启示:无需复制人类意识,但需借鉴情感在认知中的调节作用,设计更具社会适应性的可信AI(如医疗辅助系统的“情感感知”交互)。
3. 学习方式与适应性
| 维度 | 人类学习 | AI智能体学习 |
| 学习模式 | 终身持续学习,主动探索+直觉推理+经验迁移 | 静态离线批量训练,依赖人工标注数据 |
| 数据效率 | 小样本学习(如儿童通过3-5次示例掌握概念) | 需数十亿级数据训练(如LLM生成连贯文本) |
| 适应性 | 动态环境中快速泛化(如跨语言、跨领域迁移) | 需微调模型应对数据分布变化(如从新闻到医学领域) |
| 典型技术 | 类比学习、常识推理 | 监督学习、强化学习(RLHF)、指令微调 |
-
关键差距:人类通过“上下文敏感”和“社会文化交互”实现高效学习,而AI智能体在开放世界(如突发场景、歧义指令)中表现僵化。
-
研究方向:开发“持续学习”(Continual Learning)和“个性化自适应”模型,赋予AI从日常交互中渐进提升的能力。
4. 创造力的本质区别
-
人类创造力
-
驱动机制:跨领域联想(如文学创作融合历史、哲学)、情感深度(如艺术作品传达孤独感)、个人经历沉淀(如自传体小说)。
-
核心特征:原创性、情感共鸣、不可预测性(如突破性科学理论的“灵感瞬间”)。
-
-
AI智能体创造力
-
实现路径:基于训练数据的统计概率重组(如根据流行趋势生成图像风格),缺乏真实体验支撑。
-
局限性:可复制性强但深度不足,例如AI生成的诗歌符合韵律但缺乏人类特有的思想内涵。
-
-
突破可能:融合情境模拟(如历史背景建模)、人工情感模型(如“模拟恐惧”影响创作方向),提升AI创造力的层次感。
5. 演化时间尺度与系统成熟度
-
人类大脑
-
演化历程:历经数百万年自然选择,通过环境压力筛选出高效认知机制(如视觉系统对动态物体的毫秒级识别)。
-
系统成熟度:具备高度鲁棒性,能处理模糊、矛盾信息(如理解隐喻语言)。
-
-
AI智能体
-
发展周期:约80年技术迭代,在特定任务(如下棋、文本生成)超越人类,但整体认知水平相当于“幼儿期”。
-
现存瓶颈:常识推理薄弱(如理解“雨天带伞是为了避雨”)、环境适应性不足(如复杂物理场景中的机器人导航)。
-
-
对比价值:揭示AI的“跨越式发展”优势(如算力突破)与“演化缺失”短板(如缺乏自然选择的压力测试),为架构设计提供灵感(如分层模仿大脑的“感知-记忆-决策”层级)。
二、未来研究方向与启示
1. 能效与硬件革新
-
探索神经形态计算(如英特尔Loihi芯片),模仿大脑突触的低功耗连接模式,降低训练和推理能耗。
-
发展边缘智能体,减少对云端算力的依赖(如在智能手机端部署轻量级LLM)。
2. 类人类学习与适应性增强
-
研究“无监督学习+主动探索”模型,让AI智能体像人类一样通过自主互动积累知识(如机器人通过试错学习开门)。
-
开发个性化学习系统,根据用户习惯动态调整策略(如教育智能体针对学生薄弱点定制课程)。
3. 情感与伦理的技术融合
-
设计“情感感知”接口,使智能体能够识别人类情绪(如通过语音语调分析焦虑程度),并调整交互风格。
-
建立伦理决策框架,将人类价值观(如公平、隐私)编码为AI的“软约束”,避免纯算法逻辑导致的社会风险。
4. 创造力的多层次建模
-
构建“经验模拟”系统,为AI输入虚拟人生经历(如模拟“登山失败”的挫折感),增强创作的情感厚度。
-
探索“人机协作式创造”,利用AI的高效数据处理能力辅助人类突破思维定式(如设计师通过AI生成的抽象图案获得灵感)。
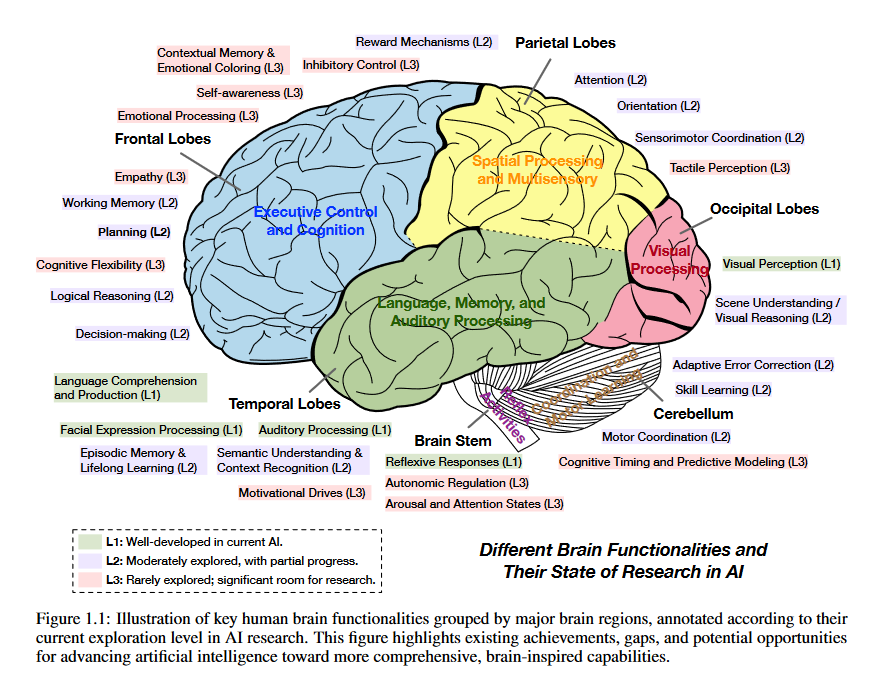
1.2.1 大脑区域功能与人工智能的相似性
一、大脑功能区域与AI发展的三级分类框架
原文将AI发展水平分为三个层级,用于对比大脑功能的实现程度:
-
L1(高度发展):AI已成熟实现,接近或超越人类水平。
-
L2(中等发展):部分实现但存在局限性,需进一步优化。
-
L3(初步探索):几乎未被研究,存在重大技术挑战。
这一框架帮助清晰定位AI在模拟脑功能时的进展与瓶颈,例如视觉感知(枕叶)属于L1,而自我意识(额叶)属于L3。
二、各大脑区域功能与AI的详细对比
1. 额叶:高阶认知的核心
-
核心功能:规划、决策、推理、工作记忆、自我意识等。
-
AI对应进展:
-
L2能力:AlphaGo等AI在围棋等限定领域实现规划与决策;Transformer的注意力机制模拟工作记忆,但灵活性不足(如无法应对复杂环境变化)。
-
L3挑战:自我意识(如AI对自身存在的认知)、认知灵活性(快速切换任务的能力)、抑制控制(抵制干扰的能力)几乎未被突破,涉及伦理风险(如自主决策的不可控性)。
-
-
关键局限:AI的“推理”依赖数据模式,缺乏人类的常识与直觉。
2. 顶叶:多感官整合与空间处理
-
核心功能:注意力、空间定位、感觉运动协调(如手眼协调)。
-
AI对应进展:
-
L2技术:机器人通过SLAM实现环境建模与导航,但多传感器融合(如视觉+触觉)的实时性和自然度不及人类。
-
L3潜力:触觉感知(如模拟指尖触觉的细腻反馈)在机器人和假肢中应用极少,需突破传感器精度与神经信号模拟。
-
-
典型案例:波士顿动力机器人能行走跳跃,但抓取精细物体仍显笨拙。
3. 枕叶:视觉处理的层级结构
-
核心功能:从简单线条识别到复杂场景理解的视觉感知。
-
AI对应进展:
-
L1成就:卷积神经网络(CNN)和视觉Transformer在图像分类、目标检测上超越人类(如ResNet识别准确率达98%)。
-
L2挑战:上下文场景理解(如“在公园中,人正在遛狗”的语义关联)和抽象推理(如通过视觉隐喻理解艺术)仍处于早期阶段。
-
-
技术瓶颈:AI易受对抗性攻击(如微小像素修改导致识别错误),而人类视觉更鲁棒。
4. 颞叶:语言、记忆与听觉
-
核心功能:语言理解、语音识别、情景记忆(如记住特定事件)。
-
AI对应进展:
-
L1突破:LLMs(如GPT-4)实现流畅的语言生成与语音识别,接近人类日常对话水平。
-
L2局限:情景记忆(如记住用户一小时前提到的个人偏好)依赖外部存储(如数据库),缺乏人类“海马体”的自然编码能力;语义理解仍依赖文本关联,缺少多模态体验(如“苹果”的视觉、触觉感知)。
-
-
典型问题:AI常“编造”事实(幻觉现象),因缺乏真实世界经验的验证。
5. 小脑:运动协调与学习
-
核心功能:精细运动控制(如打字)、运动误差校正、时间感知(如节奏感)。
-
AI对应进展:
-
L2应用:强化学习使机器人学会行走(如Atlas机器人),但动作僵硬,无法适应复杂地形。
-
L3前沿:认知时间感知(如预测事件节奏)在AI中几乎未被研究,可能为自动驾驶的时序预测提供新方法。
-
-
技术难点:人类小脑通过千万次练习优化动作,而AI需大量数据且泛化能力不足。
6. 脑干:自主功能与反射
-
核心功能:呼吸、心跳等自主调节,眨眼反射等本能反应。
-
AI对应进展:
-
L1设计:自动驾驶的紧急制动系统类似“反射”,但为预编程规则,非自主学习。
-
L3空白:自主调节(如AI系统根据“压力”动态调整计算资源)因生物与机器的本质差异,研究意义有限。
-
7. 边缘系统:情绪与动机
-
核心功能:情绪产生、共情、奖励驱动(如完成任务的满足感)。
-
AI对应进展:
-
L2浅层模拟:强化学习通过“奖励信号”训练AI(如游戏得分),但缺乏真实情绪体验。
-
L3根本挑战:AI无法“感受”快乐或悲伤,共情能力仅停留在文本情感分析(如识别“愤怒”的语气),无法理解情感的深层社会意义。
-
-
伦理风险:若AI被设计为操纵人类情绪(如社交媒体算法),可能引发心理依赖或极化。
三、脑科学对AI的启示与未来方向
原文强调,AI无需复制人类大脑的所有细节,而是借鉴其核心原则:
-
专业化与整合:大脑各区域分工明确(如枕叶看、颞叶听),又通过神经网络协同。AI可参考此构建“模块化代理”,如用CNN处理视觉、Transformer处理语言,再通过跨模态模型融合信息。
-
高效学习机制:人类通过少量数据和终身学习适应环境,而AI依赖海量标注数据。未来需发展“小样本学习”“持续学习”技术,减少对数据的依赖。
-
伦理与安全:对L3能力(如自我意识、情绪模拟)需谨慎探索,确保AI符合人类价值观,避免“失控”风险。
-
人机协作:AI应定位为“人类助手”,而非替代者。例如,在医疗中辅助诊断,但最终决策仍由医生负责,确保人类监督与可解释性。
1.3 模块化与类脑 AI 代理框架
在大型语言模型(LLM)时代,核心问题之一是缺乏统一框架来整合高级代理所需的丰富认知和功能组件。尽管LLM具备卓越的语言推理能力,但当前许多代理设计仍属于临时拼凑——它们以零散的方式整合感知、记忆或规划等模块,未能近似人类大脑等生物系统中协调良好的专业化分工。与当前LLM代理不同,人类大脑通过不同但相互连接的区域无缝平衡感知、记忆、推理和行动,促进对复杂刺激的适应性反应。相比之下,LLM驱动的代理在需要跨领域或多模态整合的任务中往往表现不佳,凸显了对类似大脑功能多样性的更整体化方法的需求。受这些相似性启发,我们的综述主张从人类大脑中汲取灵感,系统分析和设计代理框架。这一视角表明,生物系统通过紧密整合专门化组件(用于感知、推理、行动等)实现通用智能,这一方法可作为强化当前基于LLM的代理的蓝图。
神经科学研究表明,大脑利用理性回路(如 neocortex,支持深思熟虑和规划)和情感回路(如边缘系统)指导决策。记忆形成涉及海马体和皮层机制,而由多巴胺能和其他神经调节通路介导的奖励信号则强化行为和学习。这些生物学洞见为AI代理启发了若干设计原则,包括但不限于:
-
并行多模态处理:大脑通过专门的皮层区域并行处理视觉、听觉和其他感官输入,并在关联区域进行整合。类似地,AI代理可通过并行处理多样化的传感器数据流,并在后期阶段融合以实现连贯理解。
-
分层分布式认知:推理、规划、情绪调节和运动控制涉及皮层与皮层下区域的交互。类似地,AI代理可采用模块化架构,其子系统分别专注于理性推理、情感评估和记忆。
-
注意力机制:人类注意力基于上下文、目标和情绪对感官数据进行优先级排序。AI代理可通过学习到的注意力策略调节感知,根据内部状态动态调整焦点。
-
奖励与情感整合:情绪并非干扰因素,而是决策的组成部分,可调节优先级、增强警觉性并指导学习。奖励驱动的可塑性促进习惯形成和技能获取,这一概念对AI代理的强化学习至关重要。
-
目标设定与工具使用:人类前额叶皮层擅长设定抽象目标和规划动作序列(包括工具使用)。类似地,AI代理需要强大的目标管理系统和适应性动作库,由外部奖励和内在动机驱动。
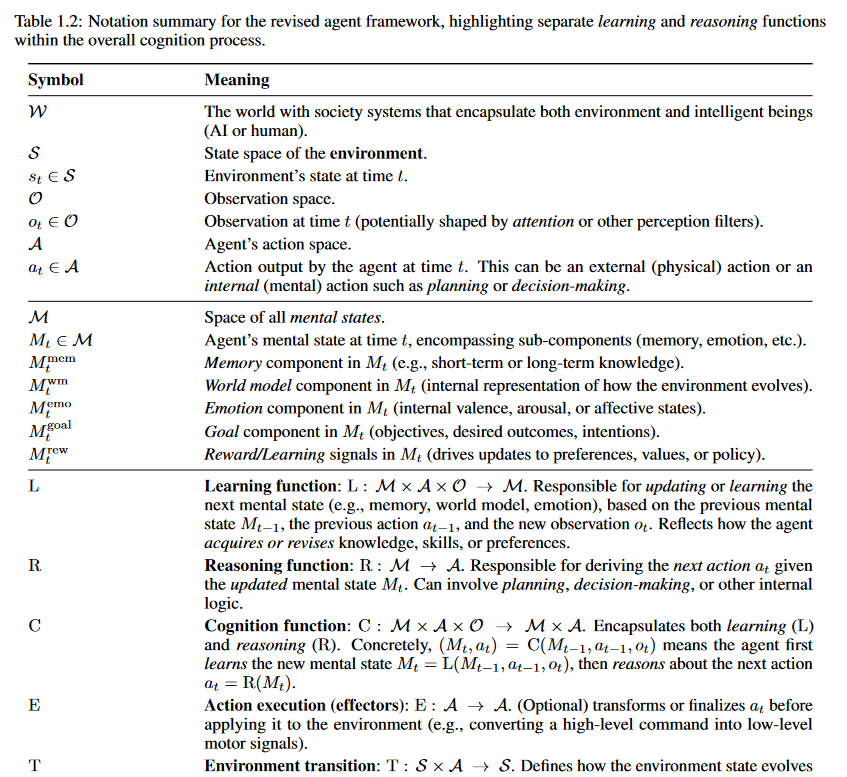
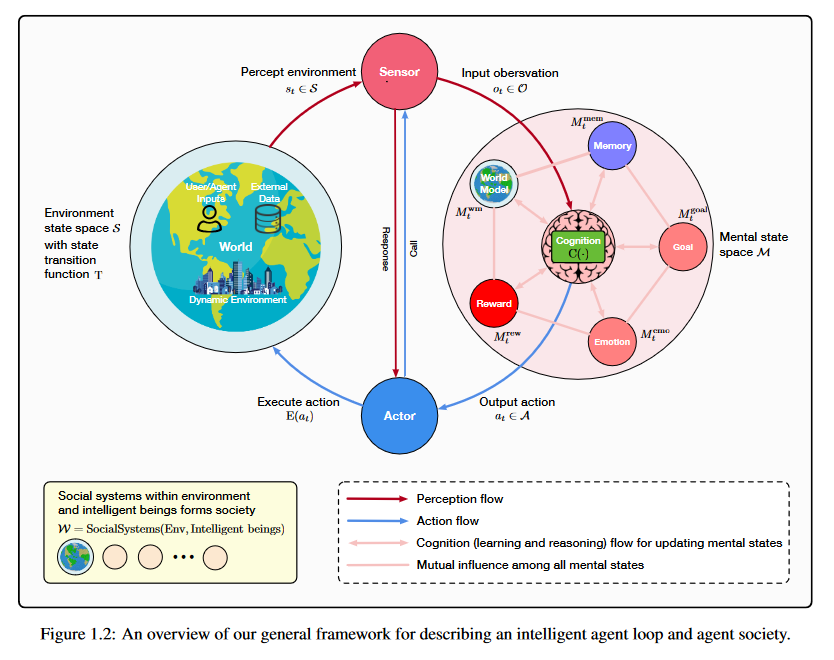
1.3.1 代理循环中的核心概念与符号
我们的架构在三个概念层级上运行:社会(Society)、环境(Environment)和代理(Agent)。代理进一步分解为三个主要子系统:感知(Perception)、认知(Cognition)和行动(Action)。在认知子系统中,我们定义了关键子模块:记忆(memory)、世界模型(world model)、情绪状态(emotional state)、目标(goals)、奖励(reward)、学习(learning)和推理过程(reasoning processes,包括作为推理产生的特殊动作的 “规划” 和 “决策”)。注意力机制主要在感知和认知模块中处理。在呈现形式化循环之前,我们在表 1.2 中总结了符号定义。图 1.2 展示了我们的代理框架,呈现了核心概念及其间不同类型的信息或控制流
-
社会(Society)
-
包含金融、法律、政治、文化等多层级规则系统,通过显性规则(如政策)和隐性规范(如文化禁忌)约束代理行为,同时受代理反馈影响(如AI行为推动规则调整)。
-
-
环境(Environment)
-
代理直接交互的物理或数字场景(如机器人所处地形、聊天机器人的对话文本),提供感知输入(如视觉、传感器数据)与动作执行接口(如机械控制、API调用)。
-
-
代理(Agent)
核心循环:通过 感知-认知-行动 闭环实现智能行为,分解为三大子系统:
-
感知层:多模态数据采集(视觉、语言、传感器),通过注意力机制过滤关键信息(如聚焦目标物体)。
-
认知层:整合记忆(短期/长期)、世界模型(预测环境响应)、情绪(调节决策优先级)、目标(驱动行为方向)、奖励(强化学习)、推理(规划动作序列)。
-
行动层:执行物理动作(如机械臂操作)或数字动作(如调用API),并反馈结果至认知层更新模型。
二、类脑认知模块的设计逻辑
-
记忆模块:模拟大脑工作记忆与长期记忆分工,短期记忆存储当前任务信息(如用户地址),长期记忆通过知识图谱结构化存储经验与常识。
-
世界模型:基于历史数据训练神经网络,预测动作后果(如“旋转关节→机器人移动”),减少实际试错成本,类似大脑的预测编码机制。
-
情绪与奖励:情绪模块计算用户情感极性或系统状态(如“低电量焦虑”),调整目标优先级;奖励机制结合外在反馈(如任务完成度)与内在动机(如好奇心驱动探索)。
-
推理与规划:将抽象目标(如“组织会议”)拆解为原子动作链(“订会议室→发邀请→准备资料”),通过工具调用模块执行,模拟前额叶的执行功能。
三、社会系统与代理的双向交互
-
约束性影响
-
社会规则(如数据隐私法、行业规范)通过合规模块实时校验代理行为,隐性文化规范通过数据注入或语义分析(如识别禁忌词)实现适应。
-
-
反馈性影响
-
代理行为可改变社会系统(如AI推荐算法影响信息传播结构),倒逼规则更新(如透明化算法的监管要求),形成“交互→系统调整→代理再适应”的动态循环。
-
四、基础代理(Foundation Agent)的创新性定义
-
核心特征:
-
持续自主性:自主设定子目标并动态调整策略(如电量不足时优先充电),而非被动响应预设奖励函数。
-
认知丰富性:整合多层级认知模块,支持复杂目标分解(如将“提升用户满意度”拆解为数据分析、流程优化等子任务),并通过推理自主优化策略。
-
跨环境适应性:兼容物理机器人、软件代理、文本智能体等多形态,统一处理不同模态交互(如机器人抓取与客服对话)。
-
-
与传统代理的差异:
-
传统代理局限于简单“感知-行动”映射(如强化学习智能体),基础代理强调认知过程的深度整合(如情绪、长期规划)与社会系统建模。
-
1.3.2 生物学启发
记忆(海马体与新皮层)
数十年神经科学研究表明,海马体与情景记忆形成相关,而皮层区域则存储语义和程序性知识[21,22]。在人类中,这些记忆子系统协同管理短期编码与长期巩固。我们的记忆组件 \( M_{\text{mem}}^t \) 同样旨在通过存储近期经验和知识实现多尺度学习。这可通过神经网络权重(长期记忆)或显式缓冲区(短期记忆)实现,从而映射海马体与皮层的交互作用。
世界模型(预测处理)
认知神经科学的一个重要理论认为,皮层作为预测机器运作,持续将传入的感官数据与生成的预期进行比较[23,19]。世界模型 \( M_{\text{wm}}^t \) 反映了这一思想,维持环境随时间演变的内部表征。正如皮层回路整合多感官数据以更新这些内部模型,我们的框架允许 \( M_{\text{wm}}^t \) 基于每一次新观察及相关奖励或情绪线索进行优化,从贝叶斯或自由能视角刻画环境动态。
情绪(边缘系统)
由杏仁核、下丘脑和边缘系统等结构介导的情绪,显著调节注意力、学习速率和决策阈值[24,25]。通过引入情绪组件 \( M_{\text{emo}}^t \),我们的模型捕捉内部效价(valence)或唤醒状态如何转移代理的焦点与行为。尽管计算“情绪”既非生物情感的完全模拟,也不涉及意识感受,但它们可引导适应性启发式策略——例如优先处理紧急目标或对感知到的威胁快速响应。
目标与奖励(前额叶与皮层下回路)
人类擅长形成抽象的长期目标,这一能力常与前额叶皮层功能相关[26,27]。与此同时,皮层下回路(尤其是多巴胺能通路)驱动强化信号,塑造动机与习惯学习[28]。我们的代理包含用于存储目标的 \( M_{\text{goal}}^t \) 和用于编码奖励信号的 \( M_{\text{rew}}^t \),从而形成目标制定与基于奖励的适应相互强化的持续反馈循环。这一机制支持计划动作序列、工具使用及更细致的社交交互。
推理、规划与决策(前额叶皮层)
最后,人类前额叶皮层整合来自记忆、感官输入、情绪和奖励通路的信息,执行逻辑推理、规划和执行控制等高级认知过程[29,30]。在我们的代理框架中,这些能力由推理子功能涵盖——通过PlanFn和Decide等模块选择并执行动作(无论是物理动作还是纯心理动作)。通过区分规划与动态决策,我们捕捉代理模拟未来场景、权衡结果并付诸行动的过程,类似于前额叶回路中观察到的灵活协调机制。
1.3.3 与现有理论的联系
与经典感知-行动循环的扩展与深化
1. 传统模型的局限性
-
经典“感知-思考-行动”循环(如[20]提出的模型)侧重简单的刺激-反应链条,缺乏对内部状态(如情绪、长期记忆)的显式建模,难以处理复杂环境中的动态决策(如多任务优先级调整)。
2. 本框架的改进
-
引入多层级认知模块:在感知层(P)增加注意力机制(如动态过滤无关信息),在认知层(C)显式整合情绪、奖励、目标等模块,使代理能根据内部状态调整行为策略(如焦虑时优先处理紧急任务)。
-
时间维度的持续性:奖励信号不再局限于即时反馈,而是与长期目标绑定(如通过内在动机驱动持续探索),突破传统模型的短期决策局限。
与明斯基‘心智社会’理论的契合与延伸
1. 理论核心的映射
-
明斯基认为智能由多个“智能体”(Agent)协作实现,每个智能体负责特定功能(如记忆、语言)。本框架的子模块(记忆Cmem、世界模型Cwm等)即对应不同“智能体”,通过交互完成复杂任务(如记忆智能体提供历史数据,世界模型智能体预测结果)。
2. 社会交互的扩展
-
传统“心智社会”聚焦个体内部智能体协作,本框架将其延伸至“社会层面”:多个代理(或子代理)可形成类似人类社会的协作/竞争关系(如自动驾驶车队中的车辆协同避障),并引入社会规则与经济模型(如资源分配机制),增强多智能体系统的适应性。
布扎基‘由内而外’视角的计算化实现
1. 神经科学理论基础
-
布扎基提出大脑通过内部模型主动解释感知输入,而非被动接收。例如,期待“门铃响”的人可能将类似声音误判为门铃声。
2. 框架中的体现
-
前序状态对感知的影响:代理的历史心智状态(\( M^{t-1} \),包含情绪、目标等)直接调节感知层(P)的信息处理。例如,目标为“寻找红色物体”的代理会在视觉输入中优先检测红色区域,类似大脑的“预期引导注意”机制。
-
主动感知而非被动反应:代理并非盲目处理所有环境刺激,而是根据内部需求有选择性地采样数据(如机器人根据电量状态优先感知充电站位置),减少计算资源浪费。
对POMDP的泛化与突破
1. POMDP的基本假设与局限
-
假设:环境状态部分可观测,转移概率已知,奖励函数由外部定义,决策目标为最大化累积奖励。
-
局限:难以处理非概率性环境(如确定性规则系统)、多目标冲突(如同时优化效率与公平性),且缺乏对情绪、记忆等认知模块的显式建模。
2. 本框架的改进维度
| 维度 | POMDP | 本框架 |
| 状态转移 | 概率性、有限状态空间 | 支持任意转移函数(概率/确定)、无限状态 |
| 奖励机制 | 单一外部标量函数 | 内部心智状态的动态组件(与情绪、目标关联) |
| 决策依据 | 最大化预期价值 | 整合记忆、情绪、社会规则的综合推理 |
| 认知建模 | 单一“信念状态”压缩所有信息 | 显式分解为记忆、世界模型等独立模块 |
3. 实际应用场景
-
在金融交易中,POMDP需预设固定奖励函数(如最大化收益),而本框架可通过情绪模块模拟市场恐慌情绪对交易策略的影响,通过世界模型预测政策变化的连锁反应,更贴近真实市场动态。
主动推理与贝叶斯大脑的理论融合
1. 主动推理的核心思想
-
大脑通过维护“生成模型”预测感官输入,并通过动作最小化预测误差(如触摸热物体时迅速缩回手以减少预测误差)。
2. 框架中的技术映射
-
世界模型( M_{wm} ):作为生成模型,预测环境对动作的响应(如“按下按钮→灯亮”),代理通过对比预测与实际感知数据(如灯未亮)更新模型参数,减少“意外感”。
-
规划与决策模块:选择动作时不仅考虑即时效果,还评估其对长期预测误差的影响(如为避免未来风险提前采取预防措施),类似大脑的前瞻性推理。
框架的跨学科价值:生物启发与工程兼容
1. 生物学合理性的抽象层次
-
非直接复制脑结构,而是提取其核心原则:
-
模块化分工:如记忆模块对应海马体-皮层系统,情绪模块对应边缘系统,但实现方式可为神经网络或符号系统。
-
动态整合:通过注意力机制模拟前额叶对多脑区的协调,而非依赖固定神经通路。
-
2. 工程实现的灵活性
-
支持混合架构:
-
符号方法:规则引擎实现合规性校验(如金融交易的监管规则)。
-
神经网络:Transformer实现语言理解,CNN处理视觉数据。
-
强化学习:优化奖励驱动的行为策略(如机器人运动控制)。
-
-
避免技术栈锁定,便于根据任务需求选择最优实现方案(如自然语言处理用LLM,物理控制用机器人学算法)。
1.4 本综述的结构导引
本综述分为四个关键部分:
第一部分:智能代理的模块化设计
我们介绍代理的核心模块,包括作为代理“大脑”的认知模块、用于解释感官输入的感知系统,以及与外部世界交互的动作系统。在认知系统内,我们进一步讨论记忆、世界建模、情绪、目标和奖励系统,分析它们的当前进展、局限性和研究挑战。
第二部分:智能代理的自我提升
我们将重点转向代理自我进化和优化的能力。我们探索适应性学习、自我反思和反馈驱动的改进等机制,这些机制的灵感来自人类随着时间推移成长和精炼技能的能力。本部分还讨论动态记忆系统和持续知识整合对于代理在变化的环境中保持相关性和有效性的重要性。
第三部分:协作与进化智能系统
我们考察代理如何与彼此及其环境交互以解决复杂的大规模问题。我们讨论多代理系统,重点介绍它们在机器人学、医疗系统和科学发现等领域的应用。本部分探讨多代理系统的拓扑结构和代理协议,追溯通信和协作从静态到动态框架的演变。我们将代理与人类协作范式相结合,研究交互模式如何塑造智能的共同进化,以及多代理系统如何在各种协作环境中调整其决策,通过集体智能解决复杂挑战。
第四部分:构建安全有益的AI
我们对基于LLM的代理的安全格局进行全面分析。我们引入一个将威胁分为内在或外在的框架:内在漏洞源于代理的架构内部,即核心LLM“大脑”以及实现与世界交互的感知和动作模块;外在风险则源于代理与记忆系统、其他代理和更广泛环境的互动。本部分不仅对这些漏洞进行形式化分析,详细说明越狱攻击和提示注入等特定攻击向量,还回顾了一系列防御机制。此外,我们探索未来方向,包括超级对齐技术和AI安全的规模法则——能力与风险之间的相互作用。
通过将这些线索交织在一起,我们的综述旨在提供关于智能代理当前状态的整体视角,并为其发展提供前瞻性路线图。我们将认知科学见解与计算设计原则相结合的独特关注点,使本综述成为寻求设计不仅强大高效,而且适应性强、符合伦理并与人类社会复杂性深度契合的代理的研究人员的基础资源。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











