







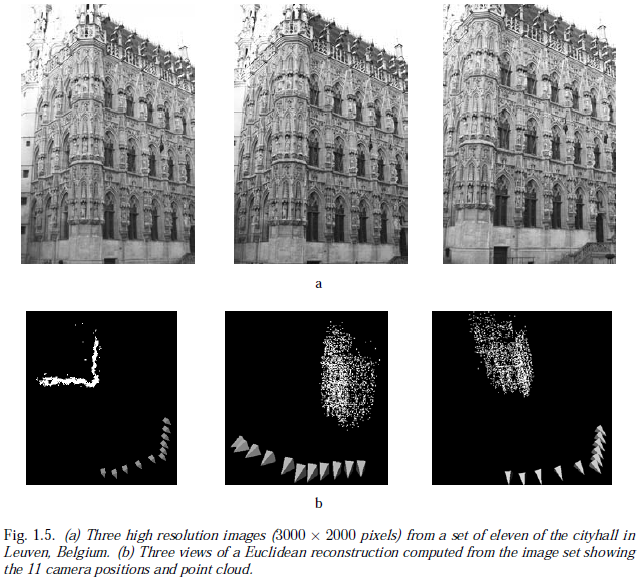
1.7 Euclidean reconstruction
之前我们学到的那些方法,参数并不齐全。如果镜头的完整calibration都知道了,则我们可以避免重建场景中的一些不确定性。
之前学到的都是投影重建,包含了不知道镜头或场景的calibration所重建出的所有可能,很多情况下这种方法并不足够。如果希望重建的模型能够获得物体的正确(欧式)形状,需要得到镜头的calibration。之前已经知道了,确定世界的欧式结构等价于指定无穷远平面和绝对二次曲线。假设我们已经使用calibrated cameras计算得到了投影重建,通过定义,我们知道这意味着每幅图的IAC都已知,假设第i幅图的IAC为wi。每个wi的逆投影是空间中的一个圆锥,而绝对二次曲线一定在这所有圆锥的交叉中。两个圆锥的交叉理论上是一个四阶曲线,但一直它们必定交叉于二次曲线,那么这个曲线会被划分为两个二次曲线。因此,两幅图像的绝对二次曲线重建并不唯一,我们会得到两个可能的解。而对于三个以上的图像,解是唯一的。从而得到了场景的欧式结构。
如果知道了场景的欧式结构,也就知道了绝对二次曲线的位置。从而可以将它投影到每个图像得到对应的IAC,然后calibrate镜头(校准镜头?)。这也就是上面说的,知道camera calibration等价于可以确定场景的欧式结构。
1.8 Auto-calibration
要确定绝对二次曲线的位置,我们需要知道至少一点点calibration of the cameras的知识。
假设对一个用于重建场景的图像序列,我们知道每个镜头的calibration都一样。对每幅图定义坐标系统,在每幅图中测量对应的特征的图像坐标来进行投影重建。假设在所有的图像坐标系中IAC一样,只是位置不知道,则根据以上的知识,我们可以计算出绝对二次曲线的位置。
一种方法是假设一副图像中IAC的位置,通过假设,其他图像中的IAC也具有相同的位置。然后逆投影得到几个圆锥,如果三个圆锥交叉于一个二次曲线,则这一定是绝对二次曲线的可能位置,与重建相符。
但这只是个假设,IAC一定是包含复平面点的,而逆投影也一定是个复圆锥。但IAC可以描述成实数二次方程格式,逆投影的圆锥也一定可以表现成实数四次方程。对IAC的某些值,三个逆投影圆锥就可以在一个二次曲线相交。
尽管知道三个镜头具有一样的calibration,就可以得到绝对二次曲线,从而得到镜头的calibration。但看看下面提出的这些方法,你会发现这仍然是个棘手的问题:
知道无穷远平面 auto-calibration的方法提出,首先确定无穷远的平面,然后得到世界的放射几何。第二步,找出绝对二次曲线在平面中的位置来得到空间的欧式几何。假设知道了无穷远的平面,就可以逆投影假设的IAC,得到想要的圆锥。如果IAC选择正确,则可以得到绝对二次曲线。因此对每对图像都可以得到一种情况,逆投影的圆锥在无穷远平面上一个相同的二次曲线处相交。这给出了IAC矩阵元的一个线性约束。根据线性方程组我们可以得到IAC,从而解出绝对二次曲线。如果知道了无穷远平面,这个方法就很简单。但无穷远平面本身的定义实质上很难。
Auto-calibration给定图像中的square pixels 如果镜头是部分calibrated,则可以通过投影重建来计算calibration。已知每幅图的欧式坐标系,则无穷远平面的绝对二次曲线一定在图像平面中有两个虚圆点(circular point)。穿过图像中虚圆点的逆投影射线一定与绝对二次曲线交叉,因此每个带有square pixels的图都可以确定两条射线必与绝对二次曲线相交。给出N个图,Auto-calibration的任务变成了决定一个空间的二次曲线,与2n个射线相交。也就是获取2n个射线与平面的交点,得到交点拼成的二次曲线。与8条射线相交得到的二次曲线的结果数量是有限的,因此4幅图就可以从有限的可能中确定calibration。
1.9 The reward I : 3D graphical models
注:以上讲的是我们学到了点的重建,我们就可以通过密集的点的集合来重建复杂的三维模型,而不是用线的重建。此节没有实质内容所以没翻译。
1.10 The reward II: video augmentation
自动重建技术现在被用来在真实电影中加入人工元素。最重要的一点是要得到镜头的正确运动。如果没有得到镜头正确的运动,不可能生成模型正确的序列,和背景融为一体。我们要的只是镜头的运动,不需要重建场景。
一旦知道了镜头正确的运动,和它的calibration,就可以使插入的物体以一种真实的方式渲染。如果帧与帧之间的camera calibration被正确定义,镜头会在序列中改变焦点长度(zoom)。甚至通过剪辑principal point都会改变。
如果要插入的模型位于现有场景的最上层, 方法还比较直观,否则就要面临遮挡问题。
第一章结束















 162
162

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









