










概述
本文将探讨如何使用中断机制获取FIFO数据并应用MotionFX库解析空间坐标。MotionFX库是一种用于传感器融合的强大工具,可以将加速度计、陀螺仪和磁力计的数据融合在一起,实现精确的姿态和位置估计。本文将介绍如何初始化和配置MotionFX库,使用中断机制读取FIFO中的传感器数据。FIFO可以作为数据缓冲区,存储传感器的临时数据,防止数据丢失,特别是在处理器忙于其他任务时。本文将利用这些数据进行空间坐标的解析。本章案例基于上节的demo进行修改。
最近在弄ST和瑞萨RA的课程,需要样片的可以加群申请:615061293 。
视频教学
https://www.bilibili.com/video/BV1Tm42137BS/
陀螺仪LSM6DSOW开发(4)----中断获取FIFO数据
样品申请
https://www.wjx.top/vm/OhcKxJk.aspx#
源码下载
https://download.csdn.net/download/qq_24312945/89602062
硬件准备
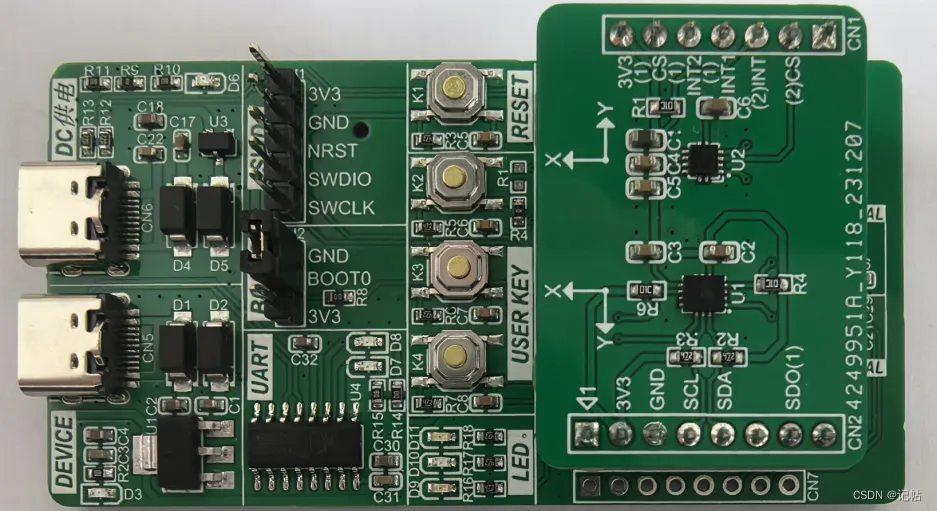
首先需要准备一个开发板,这里我准备的是自己绘制的开发板,需要的可以进行申请。
主控为STM32H503CB,陀螺仪为LSM6DSOW,磁力计为LIS2MDL。

开启LED
配置PB14为输出模式。


开启INT中断
陀螺仪LSM6DSOW的中断管脚接到了PB0,需要将PB0设置为中端口。


开启中断。

中断读取传感器数据
为了使用回调函数并获取FIFO中的数据,在main.c定义了以下变量。
/// 用于存储FIFO中读取的数据,每条数据包含7个字节(1个标签字节和6个数据字节)
uint8_t fifo_data[10*2][7];
stmdev_ctx_t dev_ctx;
uint8_t wmflag = 0;
uint16_t num = 0;
lsm6dso_fifo_tag_t reg_tag;
axis3bit16_t dummy;
// FIFO中当前存储的数据数量
uint16_t fifo_num = 0;
// FIFO中断标志,用于标记是否有新的FIFO数据可供读取
uint8_t fifo_flag=0;
static int16_t *datax;
static int16_t *datay;
static int16_t *dataz;
float acc_x,acc_y,acc_z;
float gyr_x,gyr_y,gyr_z;
uint32_t deltatime_1,deltatime_2;
uint8_t deltatime_first=0;
int out_num=0;
需要注意优化等级。

完整初始化如下所示。
/* USER CODE BEGIN 2 */
printf("HELLO!\n");
HAL_GPIO_WritePin(CS1_GPIO_Port, CS1_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(SA0_GPIO_Port, SA0_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(CS2_GPIO_Port, CS2_Pin, GPIO_PIN_SET);
HAL_Delay(100);
/* Uncomment to configure INT 1 */
lsm6dso_pin_int1_route_t int1_route;
/* Initialize mems driver interface */
dev_ctx.write_reg = platform_write;
dev_ctx.read_reg = platform_read;
dev_ctx.mdelay = platform_delay;
dev_ctx.handle = &SENSOR_BUS;
/* Init test platform */
// platform_init();
/* Wait sensor boot time */
platform_delay(BOOT_TIME);
/* Check device ID */
lsm6dso_device_id_get(&dev_ctx, &whoamI);
printf("LSM6DSO_ID=0x%x,whoamI=0x%x",LSM6DSO_ID,whoamI);
if (whoamI != LSM6DSO_ID)
while (1);
/* Restore default configuration */
lsm6dso_reset_set(&dev_ctx, PROPERTY_ENABLE);
do {
lsm6dso_reset_get(&dev_ctx, &rst);
} while (rst);
/* Disable I3C interface */
lsm6dso_i3c_disable_set(&dev_ctx, LSM6DSO_I3C_DISABLE);
/* Enable Block Data Update */
lsm6dso_block_data_update_set(&dev_ctx, PROPERTY_ENABLE);
/* Set full scale */
lsm6dso_xl_full_scale_set(&dev_ctx, LSM6DSO_2g);
lsm6dso_gy_full_scale_set(&dev_ctx, LSM6DSO_2000dps);
/* Set FIFO watermark (number of unread sensor data TAG + 6 bytes
* stored in FIFO) to 10 samples
*/
lsm6dso_fifo_watermark_set(&dev_ctx, 10);
/* Set FIFO batch XL/Gyro ODR to 12.5Hz */
lsm6dso_fifo_xl_batch_set(&dev_ctx, LSM6DSO_XL_BATCHED_AT_417Hz);
lsm6dso_fifo_gy_batch_set(&dev_ctx, LSM6DSO_GY_BATCHED_AT_417Hz);
/* Set FIFO mode to Stream mode (aka Continuous Mode) */
lsm6dso_fifo_mode_set(&dev_ctx, LSM6DSO_STREAM_MODE);
/* Enable drdy 75 μs pulse: uncomment if interrupt must be pulsed */
lsm6dso_data_ready_mode_set(&dev_ctx, LSM6DSO_DRDY_PULSED);
/* Uncomment if interrupt generation on Free Fall INT1 pin */
lsm6dso_pin_int1_route_get(&dev_ctx, &int1_route);
int1_route.fifo_th = PROPERTY_ENABLE;
lsm6dso_pin_int1_route_set(&dev_ctx, int1_route);
/* Uncomment if interrupt generation on Free Fall INT2 pin */
//lsm6dso_pin_int2_route_get(&dev_ctx, &int2_route);
//int2_route.reg.int2_ctrl.int2_fifo_th = PROPERTY_ENABLE;
//lsm6dso_pin_int2_route_set(&dev_ctx, &int2_route);
/* Set Output Data Rate */
lsm6dso_xl_data_rate_set(&dev_ctx, LSM6DSO_XL_ODR_417Hz);
lsm6dso_gy_data_rate_set(&dev_ctx, LSM6DSO_GY_ODR_417Hz);
lsm6dso_fifo_timestamp_decimation_set(&dev_ctx, LSM6DSO_DEC_1);
/* Enable timestamp */
lsm6dso_timestamp_set(&dev_ctx, PROPERTY_ENABLE);
/* USER CODE END 2 */
开启时间戳
FIFO_CTRL4 (0Ah) 寄存器用于配置LSM6DSOW传感器的FIFO行为,包括时间戳批处理减量、温度数据批处理速率和FIFO模式选择。该寄存器包含多个字段,每个字段的功能如下所述。
DEC_TS_BATCH 位于 FIFO_CTRL4 (0Ah) 寄存器中,用于配置时间戳在FIFO中的批处理减量。它决定了时间戳数据在FIFO中写入的频率。

CTRL10_C 寄存器用于启用和配置LSM6DSOW传感器的时间戳计数器。启用时间戳计数器可以在数据记录过程中提供精确的时间标记,以便更好地分析和同步传感器数据。
TIMESTAMP_EN: 用于启用或禁用时间戳计数器。

时间戳单位为25us,当启用时间戳计数器时,计数器的值可以从以下寄存器读取:TIMESTAMPO (40h),TIMESTAMP1 (41h),TIMESTAMP2 (42h),TIMESTAMP3 (43h)

lsm6dso_fifo_timestamp_decimation_set(&dev_ctx, LSM6DSO_DEC_1);
/* Enable timestamp */
lsm6dso_timestamp_set(&dev_ctx, PROPERTY_ENABLE);
中断配置
在stm32h5xx_it.c中添加回调函数引用。
/* USER CODE BEGIN 0 */
extern void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin);
/* USER CODE END 0 */
处理PB0外部中断线0(EXTI Line0)的中断。
/**
* @brief This function handles EXTI Line0 interrupt.
*/
void EXTI0_IRQHandler(void)
{
/* USER CODE BEGIN EXTI0_IRQn 0 */
HAL_GPIO_EXTI_Callback(GPIO_PIN_0);
/* USER CODE END EXTI0_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(INT1_Pin);
/* USER CODE BEGIN EXTI0_IRQn 1 */
/* USER CODE END EXTI0_IRQn 1 */
}
在main.c中添加回调函数的定义,检查中断是否由 GPIO_PIN_0 引脚触发,每次发生中断时从传感器获取当前的FIFO状态,并存储在 fifo_status 变量中。读取FIFO数据,并将这些数据存储在一个全局数组 fifo_data 中,以便在主循环或其他地方进行处理。通过切换 LED 的状态,可以直观地了解中断的发生。
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin){
if(GPIO_Pin == GPIO_PIN_0)
{
HAL_GPIO_TogglePin(LED1_GPIO_Port, LED1_Pin);
/* Read watermark flag */
lsm6dso_fifo_wtm_flag_get(&dev_ctx, &wmflag);
if (wmflag > 0) {
fifo_flag=1;
/* Read number of samples in FIFO */
lsm6dso_fifo_data_level_get(&dev_ctx, &num);
fifo_num=num;
// printf("num=%d\n",num);
for(int i=0;i<num;i++) {
/* Read FIFO tag */
lsm6dso_fifo_sensor_tag_get(&dev_ctx, ®_tag);
fifo_data[i][0]=reg_tag;
memset(data_raw_acceleration.u8bit, 0x00, 3 * sizeof(int16_t));
lsm6dso_fifo_out_raw_get(&dev_ctx, data_raw_acceleration.u8bit);
fifo_data[i][1]=data_raw_acceleration.u8bit[0];
fifo_data[i][2]=data_raw_acceleration.u8bit[1];
fifo_data[i][3]=data_raw_acceleration.u8bit[2];
fifo_data[i][4]=data_raw_acceleration.u8bit[3];
fifo_data[i][5]=data_raw_acceleration.u8bit[4];
fifo_data[i][6]=data_raw_acceleration.u8bit[5];
// printf("f1=%d f2=%d",fifo_data[i][1],fifo_data[i][2]);
// switch (reg_tag) {
// case LSM6DSO_XL_NC_TAG:
// memset(data_raw_acceleration.u8bit, 0x00, 3 * sizeof(int16_t));
// lsm6dso_fifo_out_raw_get(&dev_ctx, data_raw_acceleration.u8bit);
// acceleration_mg[0] =
// lsm6dso_from_fs2_to_mg(data_raw_acceleration.i16bit[0]);
// acceleration_mg[1] =
// lsm6dso_from_fs2_to_mg(data_raw_acceleration.i16bit[1]);
// acceleration_mg[2] =
// lsm6dso_from_fs2_to_mg(data_raw_acceleration.i16bit[2]);
// printf("Acceleration [mg]:%4.2f\t%4.2f\t%4.2f\r\n",
// acceleration_mg[0], acceleration_mg[1], acceleration_mg[2]);
// break;
// case LSM6DSO_GYRO_NC_TAG:
// memset(data_raw_angular_rate.u8bit, 0x00, 3 * sizeof(int16_t));
// lsm6dso_fifo_out_raw_get(&dev_ctx, data_raw_angular_rate.u8bit);
// angular_rate_mdps[0] =
// lsm6dso_from_fs2000_to_mdps(data_raw_angular_rate.i16bit[0]);
// angular_rate_mdps[1] =
// lsm6dso_from_fs2000_to_mdps(data_raw_angular_rate.i16bit[1]);
// angular_rate_mdps[2] =
// lsm6dso_from_fs2000_to_mdps(data_raw_angular_rate.i16bit[2]);
// printf("Angular rate [mdps]:%4.2f\t%4.2f\t%4.2f\r\n",
// angular_rate_mdps[0], angular_rate_mdps[1], angular_rate_mdps[2]);
// break;
//
// case LSM6DSO_TIMESTAMP_TAG:
// /* Read temperature data */
// memset(&data_raw_timestamp, 0x00, sizeof(int16_t));
// lsm6dso_fifo_out_raw_get(&dev_ctx, data_raw_timestamp.u8bit);
// uint32_t timestamp=0;
// timestamp+= data_raw_timestamp.u8bit[0];
// timestamp+= data_raw_timestamp.u8bit[1]<<8;
// timestamp+= data_raw_timestamp.u8bit[2]<<16;
// timestamp+= data_raw_timestamp.u8bit[3]<<24;
// printf("timestamp=%d\r\n",
// timestamp);
// break;
//
//
//
//
// default:
// /* Flush unused samples */
// memset(dummy.u8bit, 0x00, 3 * sizeof(int16_t));
// lsm6dso_fifo_out_raw_get(&dev_ctx, dummy.u8bit);
// break;
// }
}
}
}
}
主程序
在主循环中检查FIFO中断标志,如果有新的FIFO数据,则读取并处理这些数据。
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
if(fifo_flag)// 如果 FIFO 中断标志被设置
{
uint8_t acc_flag=0,gyr_flag=0;//加速度角速度标志位
uint8_t deltatime_flag=0;//时间标志位
printf("fifo_num=%d\n",fifo_num);
for(int i=0;i<fifo_num;i++)// 遍历 FIFO 数据数组
{
// 获取数据指针
datax = (int16_t *)&fifo_data[i][1];
datay = (int16_t *)&fifo_data[i][3];
dataz = (int16_t *)&fifo_data[i][5];
// 根据数据标签处理不同类型的数据
switch (fifo_data[i][0]) {
case LSM6DSO_XL_NC_TAG:// 加速度数据
acc_flag=1;
acc_x=lsm6dso_from_fs2_to_mg(*datax);
acc_y=lsm6dso_from_fs2_to_mg(*datay);
acc_z=lsm6dso_from_fs2_to_mg(*dataz);
printf("Acceleration [mg]:%4.2f\t%4.2f\t%4.2f\r\n",
acc_x, acc_y, acc_z);
break;
case LSM6DSO_GYRO_NC_TAG:// 角速度数据
gyr_flag=1;
gyr_x=lsm6dso_from_fs2000_to_mdps(*datax);
gyr_y=lsm6dso_from_fs2000_to_mdps(*datay);
gyr_z=lsm6dso_from_fs2000_to_mdps(*dataz);
printf("Angular rate [mdps]:%4.2f\t%4.2f\t%4.2f\r\n",
gyr_x,gyr_y,gyr_z);
break;
case LSM6DSO_TIMESTAMP_TAG:// 时间戳数据
deltatime_flag=1;
/* 读取时间戳数据 */
uint32_t timestamp=0;
timestamp+= fifo_data[i][1];
timestamp+= fifo_data[i][2]<<8;
timestamp+= fifo_data[i][3]<<16;
timestamp+= fifo_data[i][4]<<24;
if(deltatime_first==0)//第一次
{
deltatime_1=timestamp;
deltatime_2=deltatime_1;
deltatime_first=1;
}
else
{
deltatime_2=timestamp;
}
printf("timestamp=%d\r\n",timestamp);
break;
default:
break;
}
// 如果加速度、角速度和时间戳数据都已获取
if(acc_flag&&gyr_flag&&deltatime_flag)
{
// lsm6dso_motion_fx_determin();// 调用 MotionFX 处理函数
acc_flag=0;
gyr_flag=0;
deltatime_flag=0;
deltatime_1=deltatime_2; // 更新时间戳
}
}
// 清除 FIFO 标志和数据量
fifo_flag=0;
fifo_num=0;
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
演示
由于分别开启了加速度,角速度,时间戳到FIFO,FIFO溢出阈值设置为10,那么到12的时候数据溢出进行打印。
时间戳数据16697842-16697746=96*25us=2400us。
速率为416HZ,即2.4ms

















 1559
1559

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











