







导论:
要求主口径2160mm,整个系统的相对孔径为1:1(相对孔径:镜头的有效孔径和焦距之比)。系统的焦距为19440mm,焦点需引出主镜之后,以便配接各种光谱和光度观测设备。
设计流程:
(1)理论分析与计算
望远镜的两镜系统由一个主镜和一个次镜组成,通常主镜和次镜都是二次曲面,其表达式为:,式中,
为面型参数,可以作为消像差的自变量,
为镜面顶点的曲率半径。对于望远镜系统,其物体位于无限远,同时一般光阑与主镜重合,因此有
,
这是一个典型的R-C系统,一半取主镜的相对孔径为1:3,故主镜的焦距为
,对于焦点伸出量
,考虑到主镜与玻璃厚度及主镜轴向支撑系统占用的空间,由望远镜总体设计给出
。
因此可以计算出次镜参数,,次镜离第一焦点的距离比
(
决定了次镜的遮光比),次镜的放大倍数
,主镜的焦距乘以
即为系统的焦距,或主镜的F数乘以
的绝对值即为系统的F数。
根据消球差和慧差条件,有
![]()
将的值带入得
,主镜和次镜的顶点曲率半径及间隔为
,主镜口径/主镜相对孔=-2*6480=-12960mm,
。
(2) 系统建模
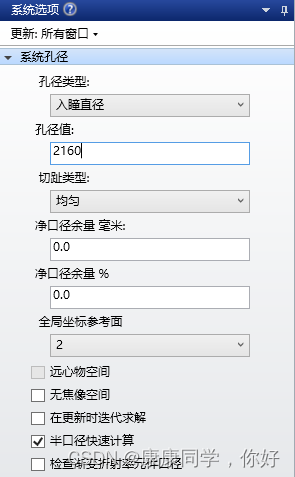
首先输入系统特性参数,如下:
在系统选项中设置孔径。在孔径类型中选择“入瞳直径”,并根据设计要求输入“2160”;
在视场设定对话框中,设置两个视场,半视场角为0.1度,如下图;

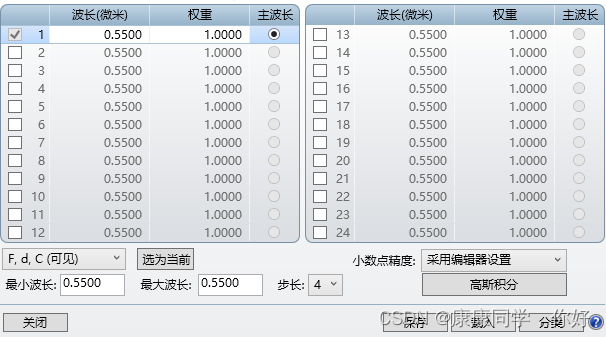
在波长设定对话框中,选择默认的0.550um,如下图;
将计算好的参数输入到“镜头数据”中;

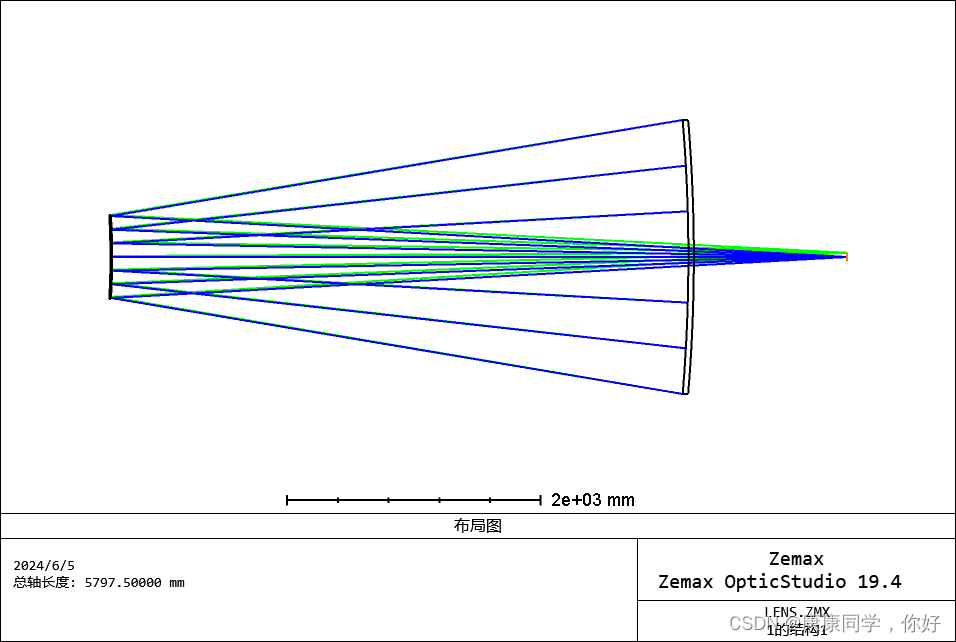
查看系统初始2D视图,如下图;

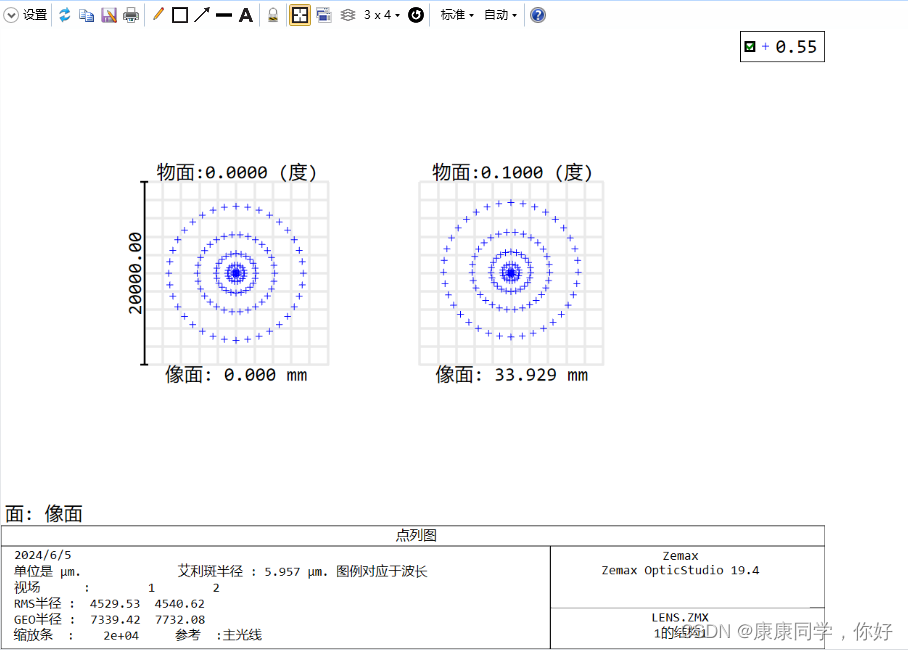
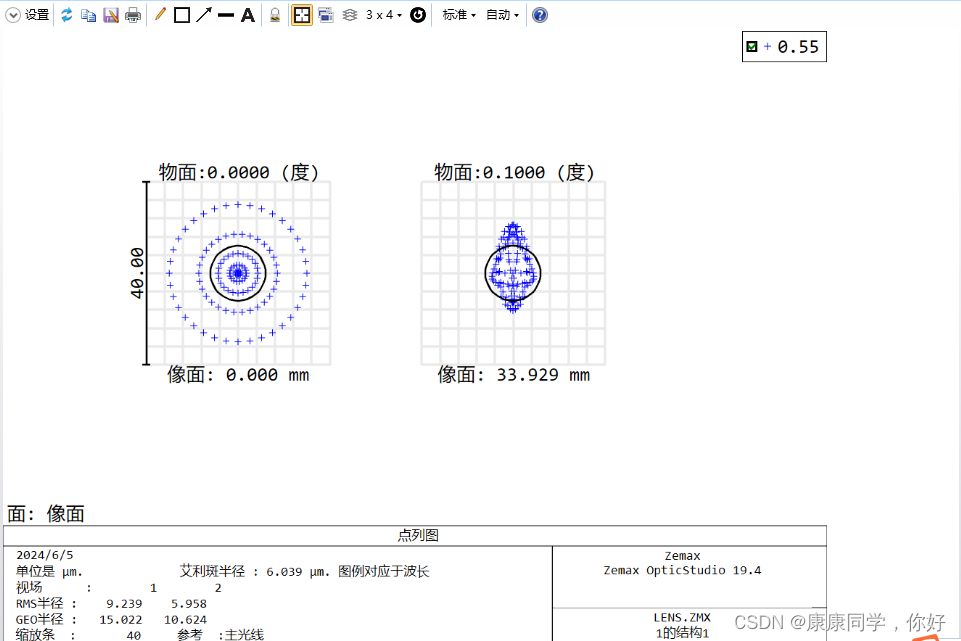
查看系统的初始点列图,如下图;
(3)优化
将主镜和次镜的二次曲面系数作为变量,如下图:

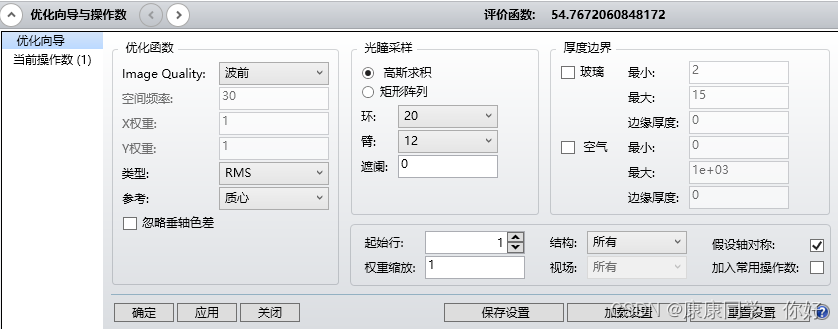
打开“评价函数编辑器”选择“优化导向”,缺省值就可以,单击“应用”。
点击“优化”,执行优化。
优化后的镜头数据参数,如下图;

优化后的2D视图,如下图;
优化后的点列图,如下图:

















 796
796

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









