







核函数
基于线性回归的知识我们可以把一个特征向量x映射到
Φ(x)=⎡⎣⎢xx2x3⎤⎦⎥
为了代替SVM使用原来的输入属性 x ,我们将要使用特征值
由于算法有
K(x,z)=ϕ(x)Tϕ(z)
我们之前在算法中用到 <x,z> <script type="math/tex" id="MathJax-Element-655"> </script>的地方都将会用 K(x,z) 代替。
现在,给定了 ϕ 之后,我们将会通过计算 ϕ(x) 和 ϕ(z) 的内积来计算 K(x,z) 。当时通常计算 K(x,z) 的代价可能会很大,甚至 ϕ 自己也会计算代价很大(可能是因为他是一个特别高的维数向量)。如何高效的计算 K(x,z) 呢?我们可以在高维空间中给定 ϕ ,但是不需要显示的找到或表示出向量 ϕ(x)
来看一个例子,假设 x,z∈Rn 并且考虑 K(x,z)=(xTz)2=∑ni=1(xizi)(∑ni=1xizi)
=∑ni=1∑ni=1xixjzizj
=∑ni,j=1(xixj)(zizj)
=ϕ(x)Tϕ(z)
特征映射 ϕ 由下式给出(这里给定n=3)

可以得到计算高纬度 ϕ(x) 需要 O(n2) 的时间复杂度,但 K(x,z) 仅仅需要 O(n) 的时间复杂度-与输入属性维数是线性关系。对于一个相似的核函数可以得到:

其对应的特征映射为(n=3):

参数c控制着 xi 之间的相关权重。
更普遍的是,核函数 K(x,z)=(xTz+c)d 对应于特征映射到一个
(n+dd)
维的特征空间,然而尽管作用于
O(nd)
维的空间,但是计算
K(x,z)
任然只需要
O(n)
的复杂度,并且我们从不需要在高维的特征空间中显示的表示特征向量。
现在,让我们讨论一些不同的核函数。直观的,如果 ϕ(x) 和 ϕ(z) 离的很近,所以我们期望 K(x,z)=ϕ(x)Tϕ(z) 将会很大,相反的,如果 ϕ(x) 和 ϕ(z) 离的很远–也就是说相互之间几乎正交—那么 K(x,z)=ϕ(x)Tϕ(z) 可能会很小。因此,我们可以认为 K(x,z) 是作为 ϕ(x) 和 ϕ(z) 或者 x,z 相似度的测量。
有了这些直观感觉之后,假设你现在有一个学习问题,你提出了一些你认为可能合理测量 x,z 之间相似度的核函数 K(x,z) 。例如,你可能选择了:
K(x,z)=exp(−||x−z||22σ2)
这是一个合理测量 x,z 相似度的函数,并且当x,z接近是它等于1,远离时等于0。我们是否能使用这样的定义K作为 SVM 的核函数呢?在这些特例中,回答是肯定的。(这个函数叫做 高斯核函数,并且对应于一个映射于无限维的特征映射 ϕ 。)但是给定一些函数K,我们怎么样判断它是否是一个有效的核函数;也就是说我们是否能找到一个特征向量 ϕ 使得 K(x,z)=ϕ(x)Tϕ(z) 对于所有的x,z都有效?
现在假设 K 确实是一个对应于一些特征映射
现在如果
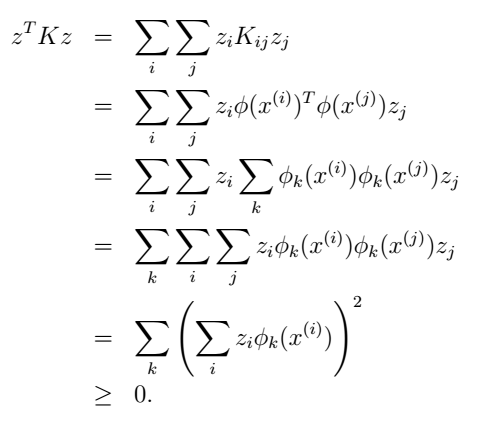
由于z是任意的,所以
因此,我们证明了如 K 是一个有效的核函数(也就是说他对应于一些特征映射
规则化和线性不可分情况
现在我们在SVM中用到的数据都假设他是线性可分的。当我通过
ϕ
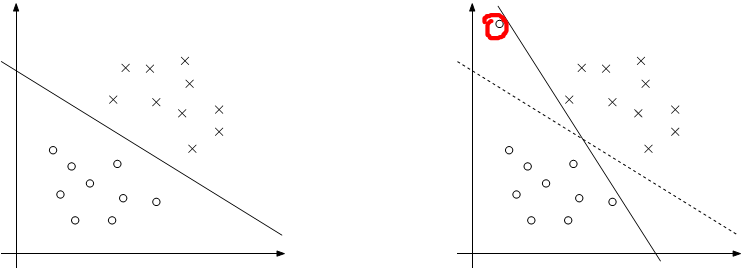
映射数据到高维特征空间时确实通常会增加我们数据的线性可分性,但是我们不能保证总会使这样。同时,我们不能保证我们找到的超平面就是我们想要的,他可能收到异常值的影响。例如,下面的左图显示这是一个最优化间隔分类器,但是当一个异常值加入后,它将会引起决定边界有一个显著的摆动,导致结果分类器有个更小的间隔。
为了使这个算法对于非线性可分数据有效,并且对于异常值不敏感,我们重新定义我们的最优化方程为:
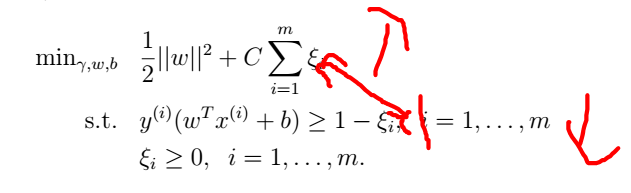
因此,现在允许样例函数间隔小于1,并且如果一个样例的函数间隔是
1−ξ
,我们可以通过**增加目标函数一个
Cξi
来补偿函数间隔。参数C用来控制使
||w||2
变大(之前导致函数间隔变小)同时保证大部分样例函数间隔至少为1。
像之前那样我们可以定义拉格朗日方程为

可以得到对偶问题为:
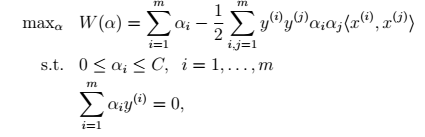
对于对偶问一唯一的改变是原来的约束条件
0≤αi
现在变成了
0≤αi≤C
。同时计算b的方式变了。
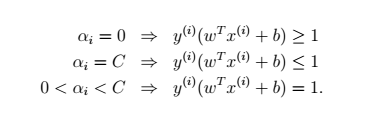
同时由于KKT对偶互补条件可以得到
如何解对偶方程,将在接下来的文章中提到。














 2225
2225











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









