







时隔一年没写CSDN笔记了,一些CESM的知识点我都快忘了。诶,主要是在国外办公室的网屏蔽了好多国内的网络,CSDN登不上,回家又不想干活。。。好吧,好多借口。。。
昨天师弟问我一些问题,想想要不可以水一篇小笔记。刚好下周开AGU,这会儿在酒店闲着。废话太多,下面进入正题。
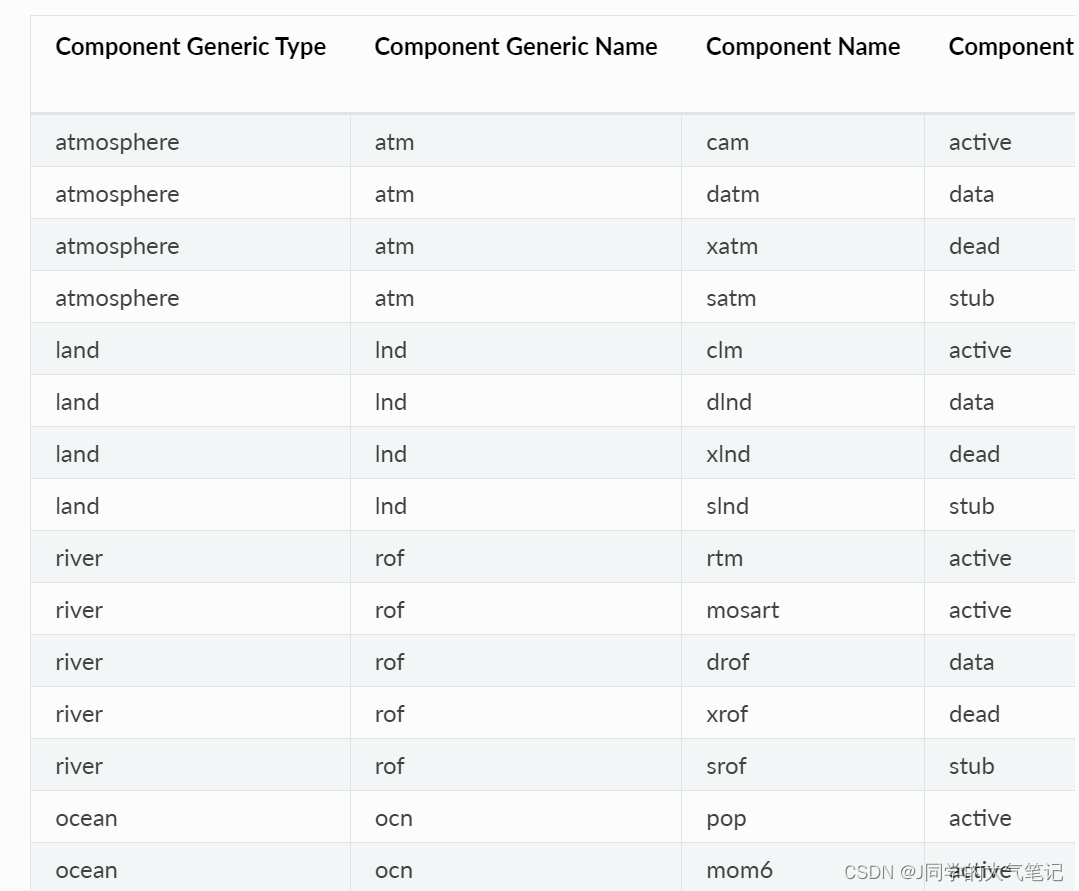
component活动状态:
一般来说,component有四种活动状态:active, data, dead, stub;
active:可以理解成dynamical,如果一个component状态为active,则表示它是fully progonostic(全预测的),就大概可以理解成是完全动态演化的。
data:由于active的运行比较昂贵,所以在一些情况下比如模式测试,spin up, 发展参数化等,就可以用data状态,该状态表示一些驱动数据是存好的,可以理解成静态驱动场。
dead:看名字就知道,基本不怎么用,其存在只是为了支持技术系统测试。死组件必须全部一起运行,并且不应与任何active或data状态组合。
stub:当模型配置不需要某些组件时,可以使用stub“存根”组件,其存在只是为了满足接口要求(例如,使用大气数据强制的活动陆地组件不需要ice、ocn或glc组件,因此使用ice、ocn和glc存根 ),和data不一样,data状态还是有读入数据的,只不过是静态的。
CESM2 Configurations (CESM2.2) — CESM CESM2.2 documentation (escomp.github.io)
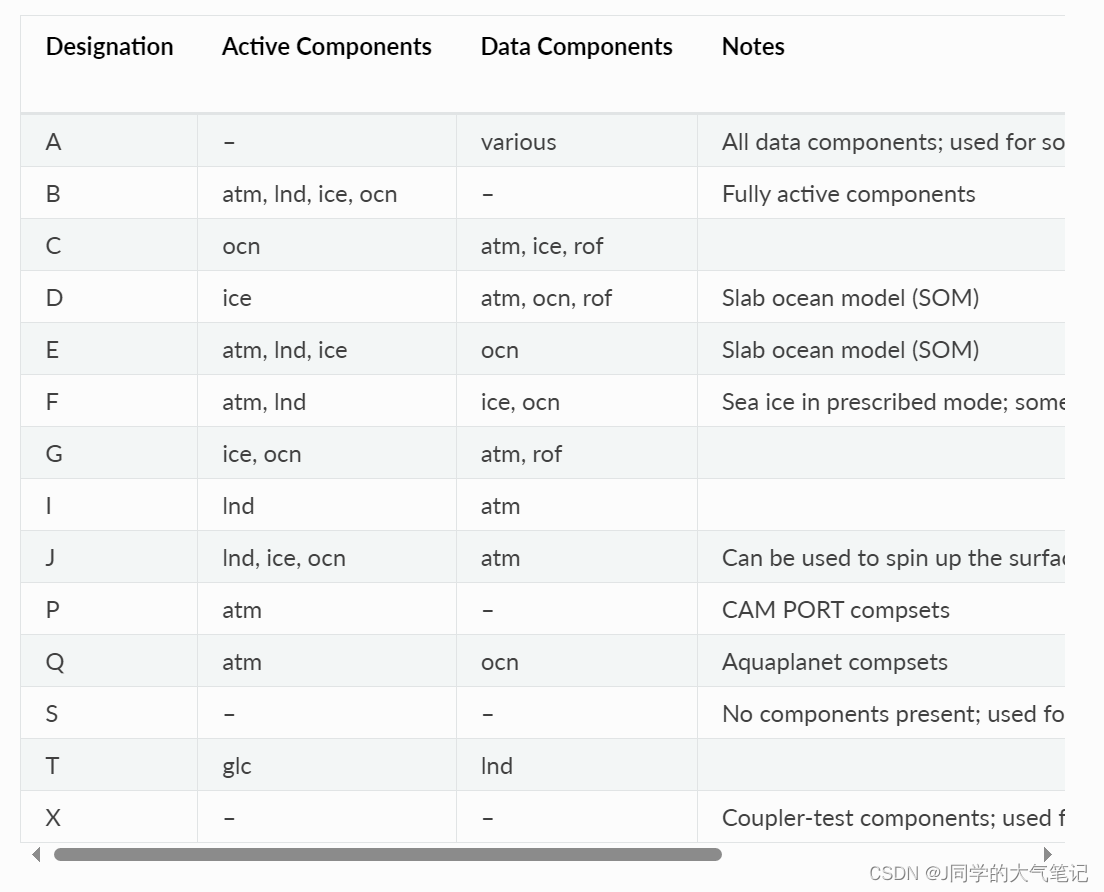
compset的前缀字母:
compset最常见的前缀可能就是B、F,但是可能很多人跑了很久模式都还是不知道这是什么意思。
B一般代表all active,就是所有的component都是全动力过程运行的。
F则是大气和陆地组件是活动的,海洋和海冰是data的。
其他的参考下图:
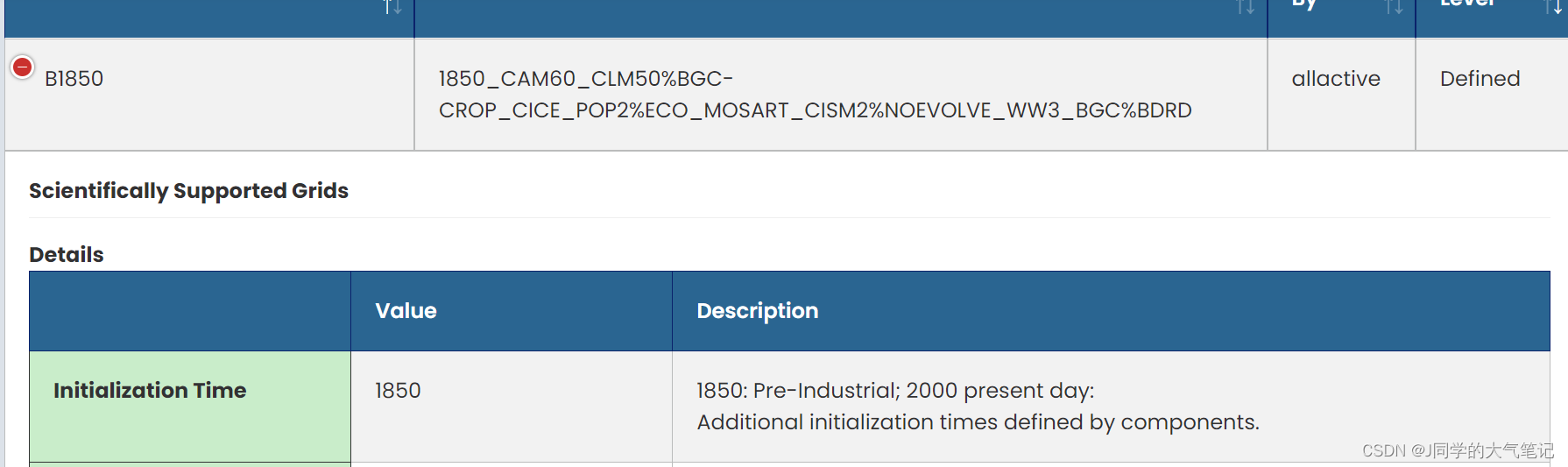
Initial time解析:
B1850和BHIST区别:
还是先供上这张图给大家先回顾一下compset的命名规则
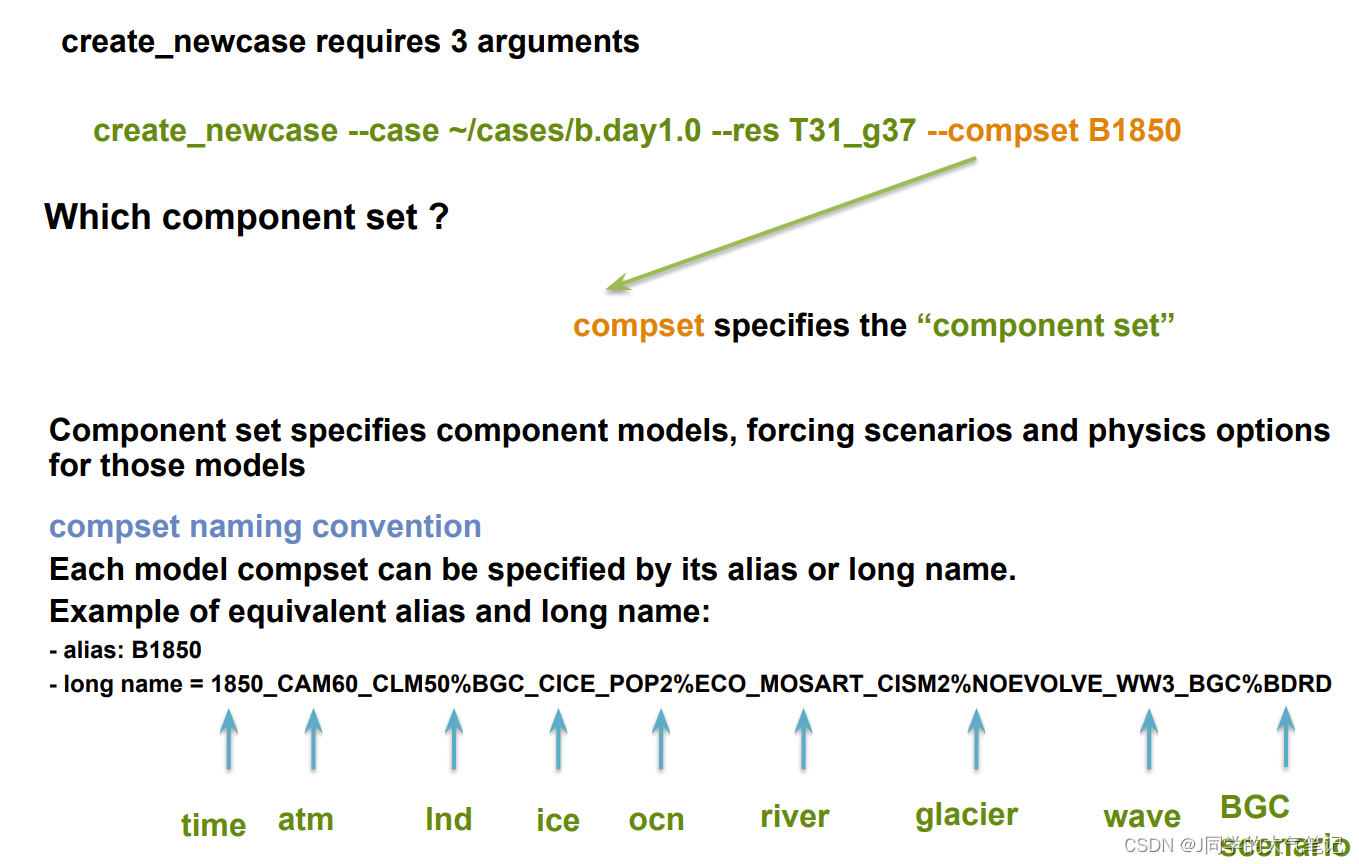 我们看到time这里会出现的比较常见的几种有1850, Hist, 2000; compset的官方介绍这里写的是initialization time,那么问题来了,什么是initialization time呢?
我们看到time这里会出现的比较常见的几种有1850, Hist, 2000; compset的官方介绍这里写的是initialization time,那么问题来了,什么是initialization time呢?
CESM论坛上面有个比较不错的解释
how to set the Initialization Time in CESM | DiscussCESM Forums (ucar.edu)
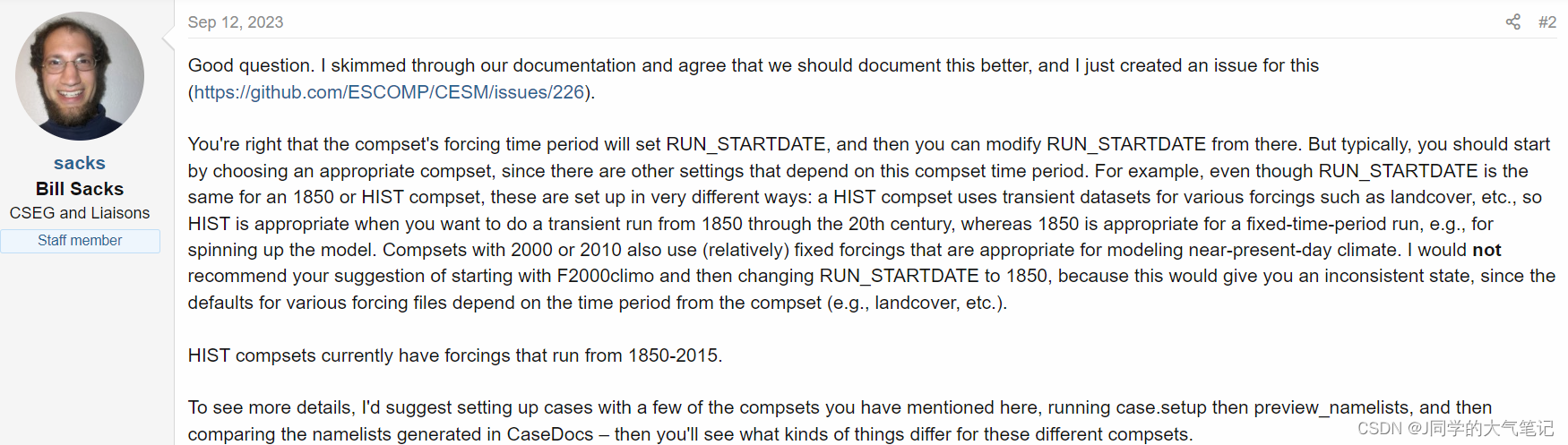
稍微再给大家解释一下:
1850的强迫保持在工业化前水平,2000的强迫保持在near present day水平ya,hist的强迫则是随时间演化的,可以理解为近真实情景的强迫的时间演变。所以如果使用B1850,和BHIST使用相同的初始时间RUN_STARTDATE,两个case的演化也是非常不同的。



















 2404
2404

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











