







 本文详细描述了如何使用倍福CX5140嵌入式控制器连接三菱MR-J4-TM伺服控制器,并通过TwinCATNC控制总线实现,包括驱动安装、设备添加、轴控制任务配置和硬件连接方法的说明。
本文详细描述了如何使用倍福CX5140嵌入式控制器连接三菱MR-J4-TM伺服控制器,并通过TwinCATNC控制总线实现,包括驱动安装、设备添加、轴控制任务配置和硬件连接方法的说明。
一. 主要参考
《TwinCAT NC 使用指南》第四章 TwinCAT NC 控制总线伺服
二. 使用嵌入式控制器CX5140添加三菱MR-J4-TM伺服控制器的方法
- 嵌入式控制器: 倍福CX5140
- 伺服控制器:三菱MR-J4-TM
具体步骤
-
驱动文件的安装
-
1). 驱动文件为:

-
2). 将驱动文件复制放入指定目录中

-
-
新建项目
-
1). 打开TwinCAT软件,新建一个项目

-
2). 按如图所示选择添加目标控制器

-
3). 添加目标控制器过程中需要输入用户名和密码,用户名默认为Administer,密码为1

-
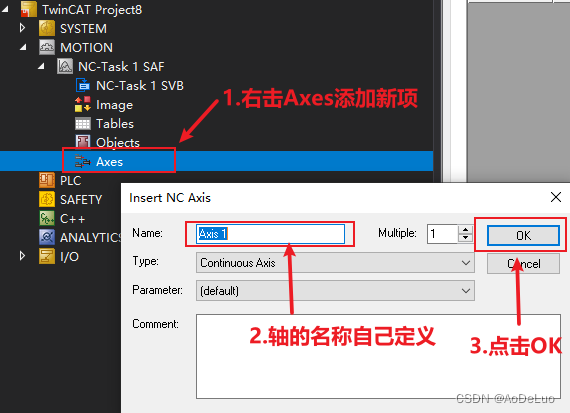
4). 在项目中添加轴axes控制任务

-
5). 在axes控制任务中添加axis
-
-
硬件连接方式:
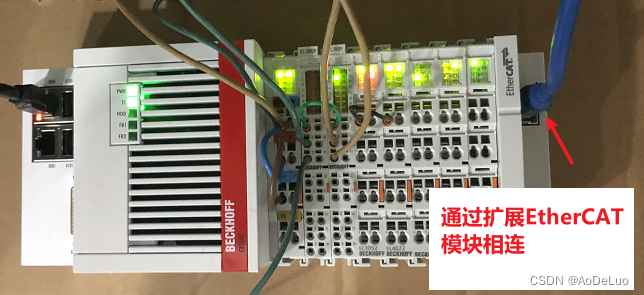
三菱伺服控制器的连接如下图所示,每个控制器通过红色网线串联,最后再通过蓝色网线与倍福控制器相连

硬件连接方式分为俩种:
(1):一种是通过CX5140扩展EtherCAT模块与伺服控制器相连:
(2):一种是通过CX5140自带的EtherCAT端口与伺服控制器相连:

两种连接方式添加伺服控制器的方法有稍微的区别。
-
软件添加伺服控制器
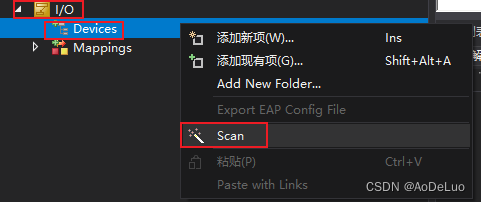
通过(1)的硬件连接方式添加伺服控制器时,步骤如下:-
1). 右击I/O选项下的Device选项,选择scan
-
2). 选择Device1EtherCAT,后续出来的窗口选择是
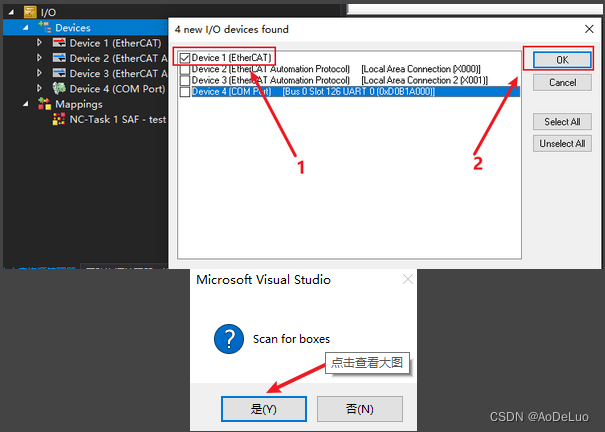
-
3). 在后续跳出来的窗口按如图所示选择

-
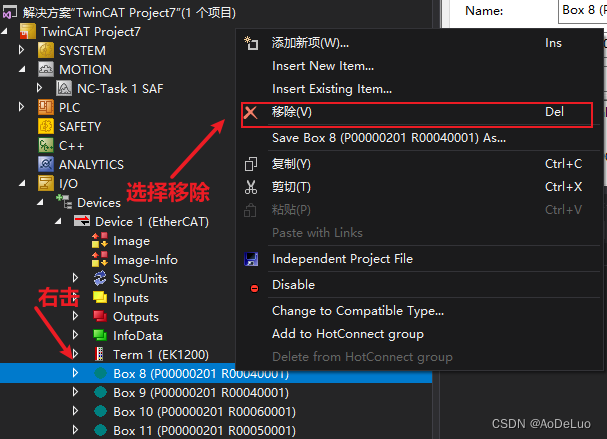
4). 选择添加进来的box,把他们都移除
-
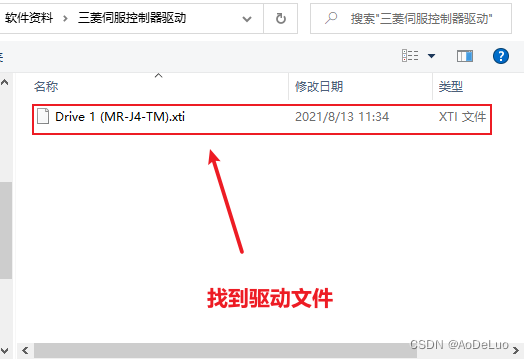
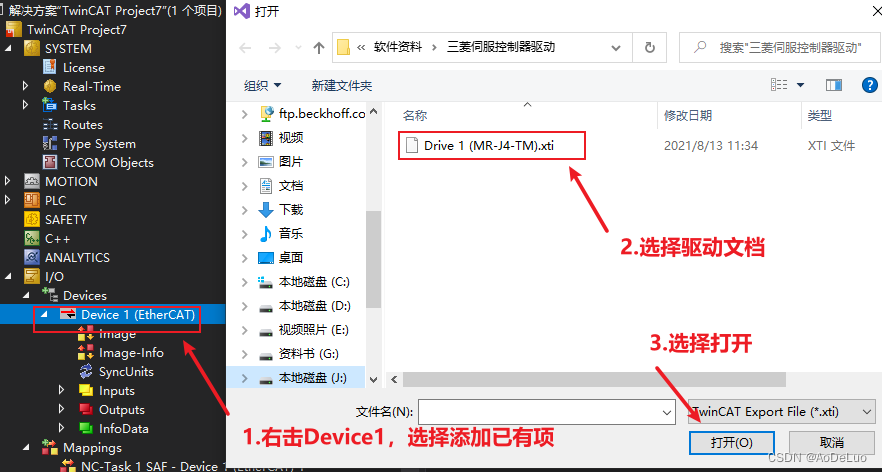
5). 右击Device1,选择添加现有项

-
6). 找到伺服控制器的驱动文件,选择打开,在弹出的窗口中选择是(有N个伺服控制器串联就按这个方式打开N个驱动文件)

-
7). 按如图所示,把轴与I/O接口关联起来

-
8). 选择激活配置

- 9). 完成激活后,每个伺服控制器会有俩个报错,目前这个报错没有任何影响

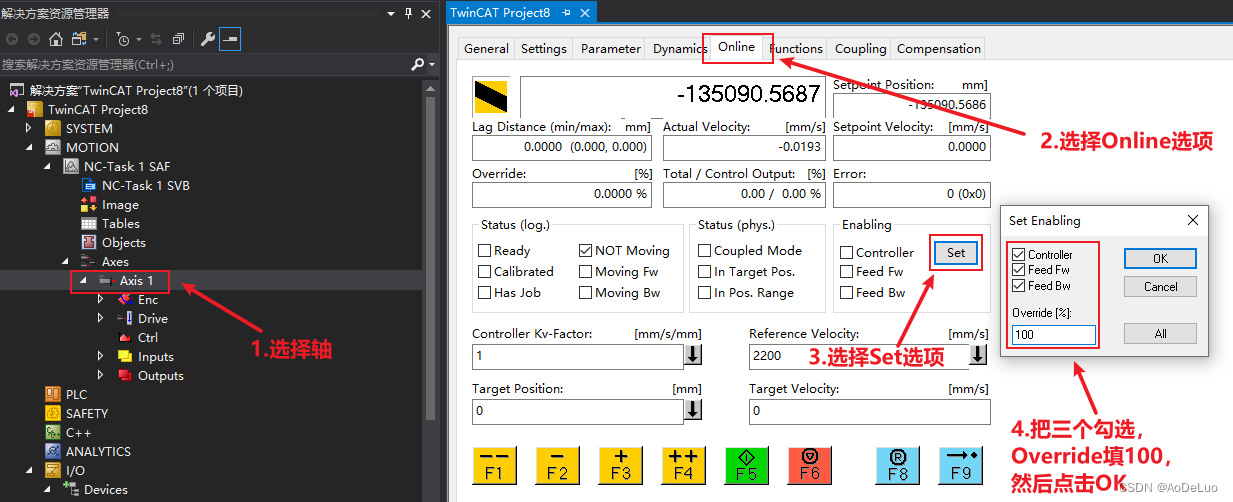
- 10). 按如下图对电机使能进行配置
- 11). 完成便可使用按钮对电机进行控制
-

通过(2)的硬件连接方式添加伺服控制器时,步骤与(1)基本相同,不同的是前三步:
-
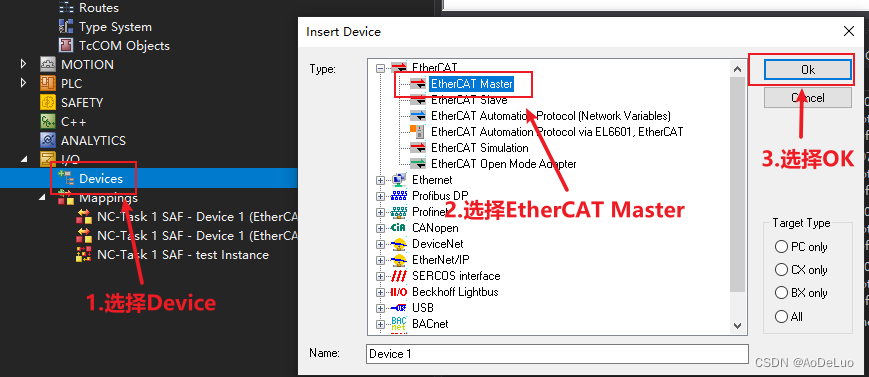
1). 选择Device,按如下添加EtherCAT Master
-
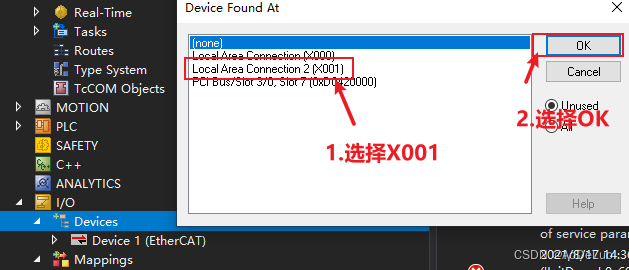
2). 选择电机连接的网口(X001)
-
3). 剩余步骤与之前相同,选择Device1以后…



















 1912
1912

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











