







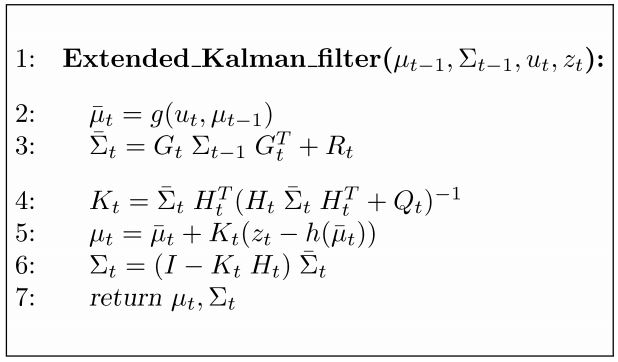
上一节主要讲解了EKF的基本原理,这一次主要关注如何将EKF算法应用在SLAM上。
EKF-SLAM
现在的问题就是解决下面这个概率分布的估计问题:
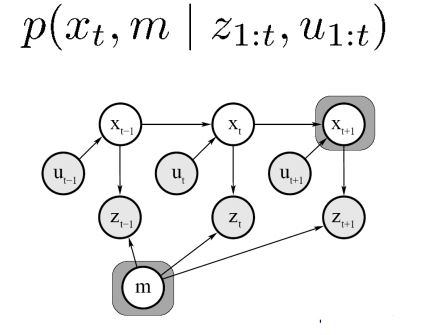
阴影部分为未知
这里我们需要确定均值和方差到底是什么?
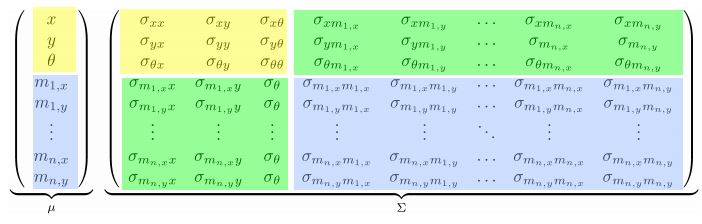
假设在2D平面内,状态表示为下面这个式子:

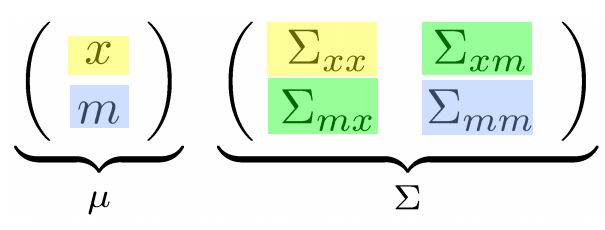
所以有均值和方差为:
这么Map有n个landmark,所以是3+2n维的高斯分布
简写为:
EKF-SLAM的过程
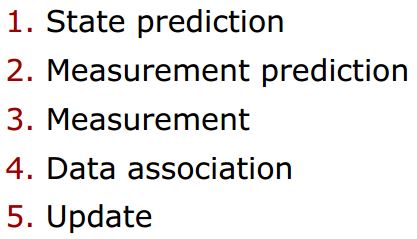
- State prediction
上一节主要讲解了EKF的基本原理,这一次主要关注如何将EKF算法应用在SLAM上。
现在的问题就是解决下面这个概率分布的估计问题:
阴影部分为未知
这里我们需要确定均值和方差到底是什么?
假设在2D平面内,状态表示为下面这个式子:
所以有均值和方差为:
这么Map有n个landmark,所以是3+2n维的高斯分布
简写为:











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 8628
8628





