







1、模板匹配
通俗讲就是以图找图,通过图中的一部分来找它在图中的位置(模板匹配就是在整个图像区域发现与给定子图像匹配的小块区域)。
模板匹配是一种最原始、最基本的模式识别方法,研究某一特定对象物的图案位于图像的什么地方,进而识别对象物,这就是一个匹配问题。
它是图像处理中最基本、最常用的匹配方法。
2、作用有局限性
必须在指定的环境下,才能匹配成功,是受到很多因素的影响,所以有一定的适应性
模板匹配具有自身的局限性,主要表现在它只能进行平行移动,若原图像中的匹配目标发生旋转或大小变化,该算法无效。
3、工作原理
在待检测图像上,从左到右,从上向下计算模板图像与重叠子图像的匹配度,匹配程度越大,两者相同的可能性越大。
模板匹配算法主要为模板图像在基准图上进行由左往右、由上到下进行相关运算,最后得到一个进行相关运算后的系数矩阵:系数矩阵中的参数值用来度量模板图像在基准图中的子区域相似程度。采用相关系数来进行评判,模板匹配算法主要有基于灰度值的模板匹配、梯度值的模板匹配、相位相关匹配等方法。 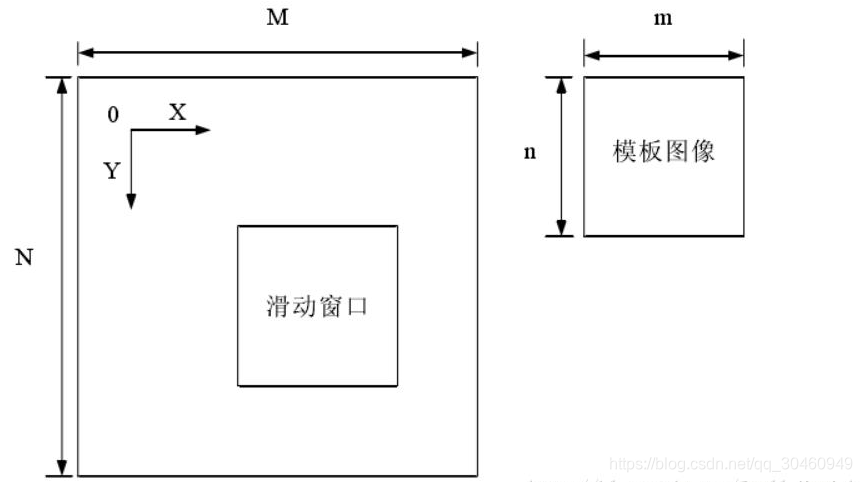
灰度值匹配
模板图像未经过任何预处理,直接取其像素值在原始图像上进行相关运算,灰度匹配算法优点在于速度快,缺点是对光照、亮度变化敏感,匹配鲁棒性不强。
梯度值匹配
针对模板匹配对光照、亮度变化敏感,有学者提出采取先对模板图和原始图分别计算其对应的梯度图。通过梯度图进行相关运算,匹配准确率得以大幅提高。
模板匹配主要缺点:
1 基于灰度匹配算法不能够解决匹配景物存在旋转的情况
2 模板匹配算法耗时较大,相对于特征匹配效率低
模板匹配算法示例(图像数字化展示)采取矩阵演示模式,假设基准图像矩阵G为:
模板图像为T(假设为基准图矩阵G的子区域复制版本):
计算T在G的匹配位置(相关运算):越界部分补零
[模板T中心点5从矩阵G起点(0,0)由左往右从上往下依次进行运算]
Gs(0, 0) = 0*1 + 0*2 + 0*3 + 0*4 + 0*5 + 0*6 + 0*7 + 0*8 + 1*9 = 9
Gs(0, 1) = 0*1 + 0*2 + 0*3 + 0*4 + 0*5 + 0*6 + 0*7 + 1*8 + 2*9 = 26
……
计算所有的相关系数矩阵Gs :
通过相关系数矩阵Gs可以看出,矩阵中最大参数值为285,最大参数值对应模板匹配的中心位置点(坐标)[绿色线框标定匹配结果]。当然,模板匹配算法改进会添加归一化步骤,梯度图像或者相位图的匹配。














 4132
4132











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









