







1. ConvLSTM
来源: Convolutional LSTM network: A machine learning approach for precipitation nowcasting
结构介绍:
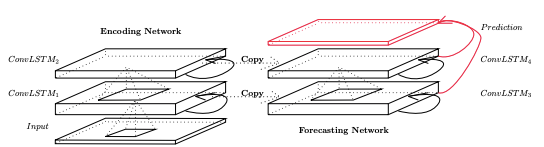
与FC-LSTM一样,ConvLSTM也可以用作更复杂结构的构建块。对于我们的时空序列预测问题,如下图所示的结构,它由两个网络组成,一个编码网络和一个预测网络。与[21]类似,预测网络的初始状态和单元输出是从编码网络的最后一个状态复制过来的。两个网络都是由若干ConvLSTM层叠加而成。由于我们的预测目标与输入具有相同的维数,我们将预测网络中的所有状态连接起来,并将它们输入到一个1×1卷积层中,从而生成最终的预测。 也就是说编码LSTM将整个输入序列压缩为一个隐藏状态张量,预测LSTM展开这个隐藏状态,给出最终的预测:
本文预测任务:
假设我们观察了一个空间区域上的动态系统,该空间区域由M×N网格表示,网格由M行和N列组成。在网格中的每个单元中,有随时间变化的P值。因此,任何时刻的观测结果都可以用一个张量 X ∈ R P × M × N \mathcal{X} \in \mathbf{R}^{P \times M \times N} X∈RP×M×N来表示,其中 R \mathbf{R} R表示观测特征的区域。如果我们周期性地记录观察,就会得到一个张量序列 X ^ 1 , X ^ 2 , … , X ^ t \hat{\mathcal{X}}_{1}, \hat{\mathcal{X}}_{2}, \ldots, \hat{\mathcal{X}}_{t} X^1,X^2,…,X^t。时空序列预测问题是根据包括当前观测在内的前J个观测值,预测未来最可能出现的k个序列:
X ~ t + 1 , … , X ~ t + K = arg max X t + 1 , … , X t + K p ( X t + 1 , … , X t + K ∣ X ^ t − J + 1 , X ^ t − J + 2 , … , X ^ t ) \tilde{\mathcal{X}}_{t+1}, \ldots, \tilde{\mathcal{X}}_{t+K}=\underset{\mathcal{X}_{t+1}, \ldots, \mathcal{X}_{t+K}}{\arg \max } p\left(\mathcal{X}_{t+1}, \ldots, \mathcal{X}_{t+K} \mid \hat{\mathcal{X}}_{t-J+1}, \hat{\mathcal{X}}_{t-J+2}, \ldots, \hat{\mathcal{X}}_{t}\right) X~t+1,…,X~t+K=Xt+1,…,Xt+Kargmaxp(Xt+1,…,Xt+K∣X^t−J+1,X^t−J+2,…,X^t)
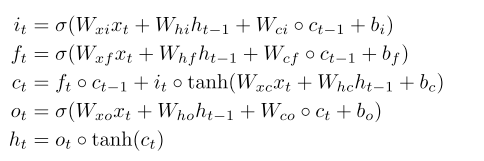
具体过程:
2. PreRNN
未完待续。。。
References
[1] Xingjian S H I, Chen Z, Wang H, et al. Convolutional LSTM network: A machine learning approach for precipitation nowcasting[C]//Advances in neural information processing systems. 2015: 802-810.


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









