







前些日子帮老师做了个NS2仿真的小项目,现在项目做完了,写篇博客把流程记录下来。做项目时,NS2和GPSR相关的东西找了好久,总会遇到问题,希望我这篇博客能给广大同学们带来点帮助吧。
目录
NS2环境搭建
软硬件环境概述
- Windows10(x64)
- VMware Workstation Pro 12.5
- LinuxMint 18.1
- ns-allinone-2.35
环境搭建过程
首先,在官网下载ns-allinone-2.35.tar.gz压缩包(http://sourceforge.net/projects/nsnam/files/allinone/ns-allinone-2.35/ns-allinone-2.35.tar.gz/download),再下载GPSR源码,我选择的是CSDN上的KeLiu版(http://download.csdn.net/download/joanna_yan/8474651)。
NS2安装
按Ctrl+Alt+T,打开终端
依次输入
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install build-essential
sudo apt-get install tcl8.5 tcl8.5-dev tk8.5 tk8.5-dev
sudo apt-get install libxmu-dev libxmu-headers
tar xvfz ns-allinone-2.35.tar.gz
cd ns-allinone-2.35
sudo ./install
在安装的时候会报个错,这是由于源码gcc版本比较老
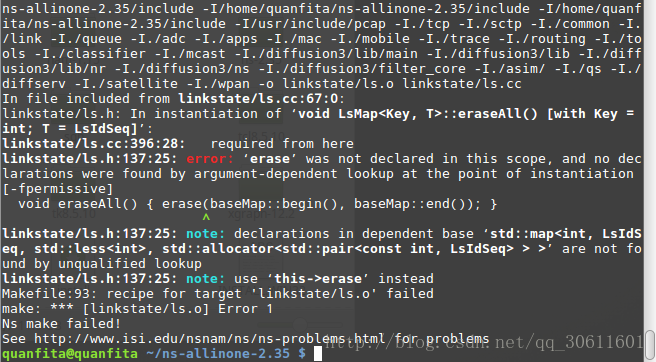
修改只要在linkstate/ls.h文件137行

修改成

然后重新安装
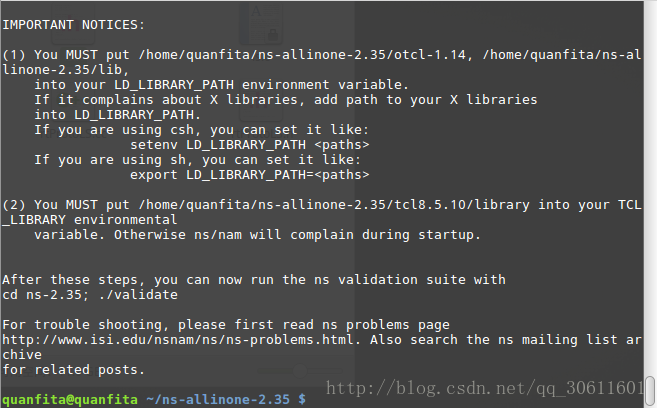
如上图所示,这样就安装成功了。
然后我们需要配置环境变量,否则无法启动。
sudo gedit /home/(用户名)/.bashrc
在最后加上下面语句,用户名换成自己的即可
export PATH="$PATH:/home/(用户名)/ns-allinone-2.35/bin:/home/(用户名)/ns-allinone-2.35/tcl8.5.10/unix:/home/(用户名)/ns-allinone-2.35/tk8.5.10/unix"
export LD_LIBRARY_PATH="$LD_LIBRARY_PATH:/home/(用户名)/ns-allinone-2.35/otcl-1.14:/home/(用户名)/ns-allinone-2.35/lib"
export TCL_LIBRARY="$TCL_LIBRARY:/home/(用户名)/ns-allinone-2.35/tcl8.5.10/library"
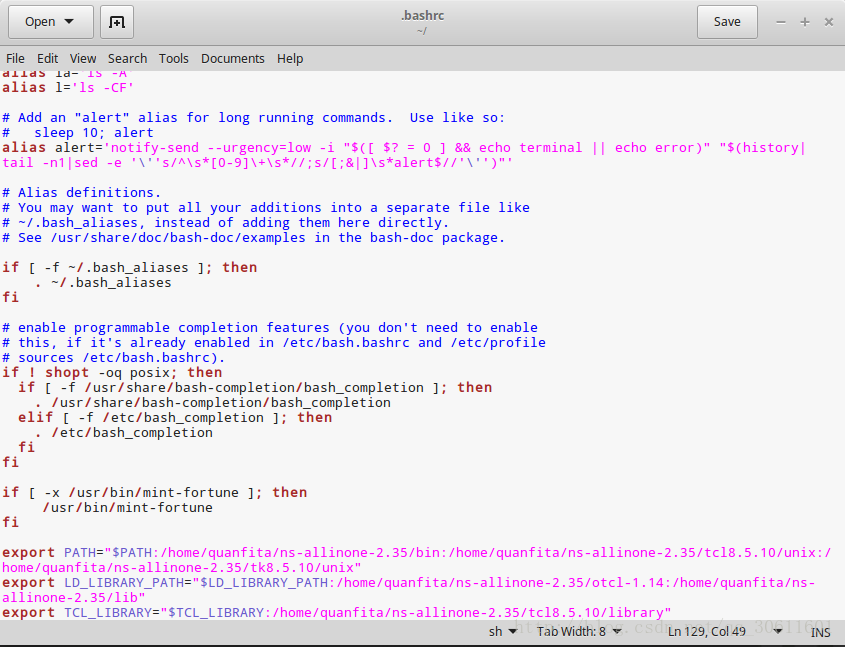
修改完毕,保存,关闭当前终端,再打开一个新的终端,输入ns,回车,如果显示一个%,就证明ns2安装成功了。

NAM安装
终端输入nam,如果能够出现nam的窗口则nam可以正常使用,如果提示nam没有安装或者是不能识别的命令,cd /home/ns-allinone-2.35/nam.1.15,ls看看是否有nam文件,如果有的话cp nam ../bin,把nam命令复制到bin中。如果没有的话,sudo ./configure,再sudo make,现在得到了nam,再把nam命令复制到bin中。 接着在终端输入nam检验是否可以运行。
开始实验
添加GPSR协议
我们搭建好了NS2仿真平台,现在就可以把我们准备好的协议源码解压,放到ns-2.35目录下,然后对ns2的代码进行修改,使我们的协议可以正常运行。
1. 进入$HOME/ns-allinone-2.30/ns-2.30/common,修改packet.h
enum packet_t{
//增加 PT_GPSR
}
class p_info {
//增加 name_[PT_GPSR]= “gpsr”
}
2. 进入$HOME/ns-allinone-2.30/ns-2.30/trace,修改 cmu-trace.cc
void CMUTrace::format(Packet* p, const char *why)
{
//增加 case PT_GPSR;
break;
}
3. 进入$HOME/ns-allinone-2.30/ns-2.30/queue,修改priqueue.cc
void PriQueue::recv(Packet *p, Handler *h)
{
//增加 case PT_GPSR:
}
4. 进入$HOME/ns-allinone-2.30/ns-2.30/tcl/lib,修改ns-packet.tcl
foreach prot{
#增加GPSR
}5. 进入$HOME/ns-allinone-2.30/ns-2.30/ ,修改Makefile
OBJ_STL = #最后按照格式加入( gpsr前为TAB键而不是空格)
gpsr/gpsr_neighbor.o\
gpsr/gpsr_sinklist.o\
gpsr/gpsr.o
#如果需要加入调试信息,则在CCOPT = -Wall 加上 -g, 如下:
CCOPT = -g -Wall
6.重新编译,执行如下命令
cd $HOME/ns-allinone-2.30/ns-2.30/common
touch packet.cc
cd ..
sudo make clean
sudo make
修改协议源码
在仿真过程中,发现KeLiu版GPSR协议在移动场景下存在一些问题,我们进行如下修改:
1、gpsr.h文件:
90行左右:
class GPSRUpdateSinkLocTimer : publicTimerHandler {
public:
GPSRUpdateSinkLocTimer(GPSRAgent *a) : TimerHandler() {a_=a;} <---这7行
protected:
virtual void expire(Event *e);
GPSRAgent *a_;
};
class GPSRQueryTimer : public TimerHandler{
public:
GPSRQueryTimer(GPSRAgent *a) : TimerHandler() {a_=a;}
protected:
virtual void expire(Event *e);
GPSRAgent *a_;
};
106行左右:
friend class GPSRHelloTimer;
friend class GPSRQueryTimer;
friend class GPSRUpdateSinkLocTimer;
MobileNode *node_; //the attached mobile node
PortClassifier *port_dmux_; //for the higher layer app de-multiplexing
125行左右:
GPSRHelloTimer hello_timer_;
GPSRQueryTimer query_timer_;
GPSRUpdateSinkLocTimer update_sink_loc_timer_; <---这行
intplanar_type_; //1=GG planarize, 0=RNG planarize
double hello_period_;
double query_period_;
double start_update_time_; <---
double update_sink_loc_period_; <---这2行
void turnon(); //setto be alive
void turnoff(); //setto be dead
void startSink();
voidstartSink(double);
165行左右:
void hellotout(); //called bytimer::expire(Event*)
void querytout();
void updatesinkloctout(); <---这行
public:
GPSRAgent();
2、gpsr.cc文件:
70行左右:
void
GPSRQueryTimer::expire(Event *e){
a_->querytout();
}
void
GPSRUpdateSinkLocTimer::expire(Event *e){
a_->updatesinkloctout();
}
void
GPSRAgent::hellotout(){
getLoc();
nblist->myinfo(my_id,my_x,my_y);
//sink_list->update_sink_loc(my_id,my_x,my_y);
//printf("%f\n",node_->speed());
hellomsg();
hello_timer.resched(hello_period);
}
void
GPSRAgent::updatesinkloctout(){
getLoc();
sink_list->update_sink_loc(my_id,my_x,my_y);
//printf("__\n");
update_sink_loc_timer.resched(update_sink_loc_period);
}
void
GPSRAgent::startSink(){
if(sink_list->new_sink(my_id, my_x, my_y,
my_id, 0, query_counter))
querytout();
}
119行左右:
GPSRAgent::GPSRAgent() : Agent(PT_GPSR),
hello_timer(this), query_timer(this),
update_sink_loc_timer_(this),
my_id(-1), my_x(0.0), my_y_(0.0),
recv_counter(0), query_counter(0),
query_period_(INFINITE_DELAY)
{
bind("planar_type", &planar_type);
bind("hello_period", &hello_period);
bind("update_sink_loc_period", &update_sink_loc_period);
sink_list_ = new Sinks();
nblist_ = new GPSRNeighbors();
for(int i=0; i<5; i++)
randSend_.reset_next_substream();
}
void
GPSRAgent::turnon(){
getLoc();
nblist->myinfo(my_id, my_x, my_y);
hello_timer.resched(randSend.uniform(0.0, 0.5));
update_sink_loc_timer.resched(start_update_time);
}
void
GPSRAgent::turnoff(){
hello_timer_.resched(INFINITE_DELAY);
query_timer_.resched(INFINITE_DELAY);
update_sink_loc_timer_.resched(INFINITE_DELAY);
}
3、gpsr_sinklist.h文件中:
55行:
class Sinks {
struct sink_entry *sinklist_;
public:
Sinks();
bool new_sink(nsaddr_t, double, double, nsaddr_t, int, int);
bool update_sink_loc(nsaddr_t, double, double);
bool remove_sink(nsaddr_t);
void getLocbyID(nsaddr_t, double&, double&, int&);
void dump();
};
4、gpsr_sinklist.cc中:
74行:
temp->next_ = sinklist_;
sinklist_ = temp;
return true;
}
bool
Sinks::update_sink_loc(nsaddr_t id,doublex,double y)
{
struct sink_entry *temp = sinklist_;
while(temp){
if(temp->id_ == id){
temp->x_ = x;
temp->y_ = y;
return true;
}
temp = temp->next_;
}
return false;
}
bool
Sinks::remove_sink(nsaddr_t id){
struct sink_entry *temp;
struct sink_entry *p, *q;
修改完成后重新编译NS2。
但是NAM还是有问题,这里是自带的TCL文件的问题,做如下修改就可以了:
61行左右:
set opt(tr) trace.tr ;# trace file
set opt(nam) gpsr.nam <---这里
set opt(rp) gpsr ;# routing protocol script(dsr or dsdv)
set opt(lm) "off" ;# log movement
117行左右:(修改比较多,行数不准)
# ======================================================================
# Agent/GPSR setting
Agent/GPSR set planar_type_ 1 ;#1=GG planarize, 0=RNG planarize
Agent/GPSR set hello_period_ 1.5 ;#Hello message period
Agent/GPSR set update_sink_loc_period_ 0.5
Agent/GPSR set start_update_time_ 0.001
#======================================================================
159行左右:
set tracefd [open $opt(tr) w]
ns_ trace-all tracefd
set namfile [open $opt(nam) w]
ns_ namtrace-all-wireless namfile opt(x)opt(y)
topo load_flatgrid opt(x) $opt(y)
prop topography topo
197行左右:
source ./gpsr.tcl
for {set i 0} {i < opt(nn) } {incr i}{
gpsr-create-mobile-node $i
ns_ initial_node_pos node_($i) 20
node_(i) namattach $namfile
}
#
# Source the Connection and Movementscripts
#
下面是CBR和场景文件的问题:给个简单的3个节点的例子,在trace文件中可以看到数据包的转发和接收
cbr文件:
# GPSR routing agent settings
for {set i 0} {i < opt(nn)} {incr i} {
ns_ at 0.00002 "ragent_($i) turnon"
ns_ at 2.0 "ragent_($i) neighborlist"
# ns_ at 30.0 "ragent_($i) turnoff"
}
ns_ at 11.2 "ragent_(2) startSink10.0" #<---这里只要让目标节点startSink就可以,例子是0向2发
set null_(1) [new Agent/Null]
ns_ attach-agent node(2) $null(1)
set udp_(1) [new Agent/UDP]
ns_ attach-agent node(0) $udp(1)
set cbr_(1) [new Application/Traffic/CBR]
$cbr(1) set packetSize 32
$cbr(1) set interval 2.0
$cbr(1) set random 1
# $cbr(1) set maxpkts 100
cbr_(1) attach-agent udp_(1)
ns_ connect udp(1) $null(1)
ns_ at 66.0 "cbr_(1) start"
ns_ at 150.0 "cbr_(1) stop"
修改底层协议为802.11p
GPSR是路由协议,也就是工作在网络层的,底层的协议默认应该是IEEE802.11。应该用IEEE802.11p,这个才是针在ns-allinone-2.35/ns-2.35/tcl/ex/802.11目录下找到了IEEE802-11p.tcl文件,里面的设置都是符合IEEE802.11p协议的参数对车载自组网的协议。
所以在wireless-gpsr.tcl中把其他的MAC层和物理层的设置都注释掉,换上IEEE802.11p的设置:
94行左右:
#Phy/WirelessPhy set CPThresh_ 10.0
#Phy/WirelessPhy set CSThresh_ 1.559e-11
#Phy/WirelessPhy set RXThresh_ 3.652e-10
#Phy/WirelessPhy set Rb_ 2*1e6
#Phy/WirelessPhy set freq_ 914e+6
#Phy/WirelessPhy set L_ 1.0
# The transimssion radio range
#Phy/WirelessPhy set Pt_ 6.9872e-4 ;# ?m
#Phy/WirelessPhy set Pt_ 8.5872e-4 ;# 40m
#Phy/WirelessPhy set Pt_ 1.33826e-3 ;# 50m
#Phy/WirelessPhy set Pt_ 7.214e-3 ;# 100m
#Phy/WirelessPhy set Pt_ 0.2818 ;# 250m
#802.11p
puts "Loading IEEE802.11pconfiguration..."
source ../tcl/ex/802.11/IEEE802-11p.tcl
puts "Load complete..."
修改无线传输范围
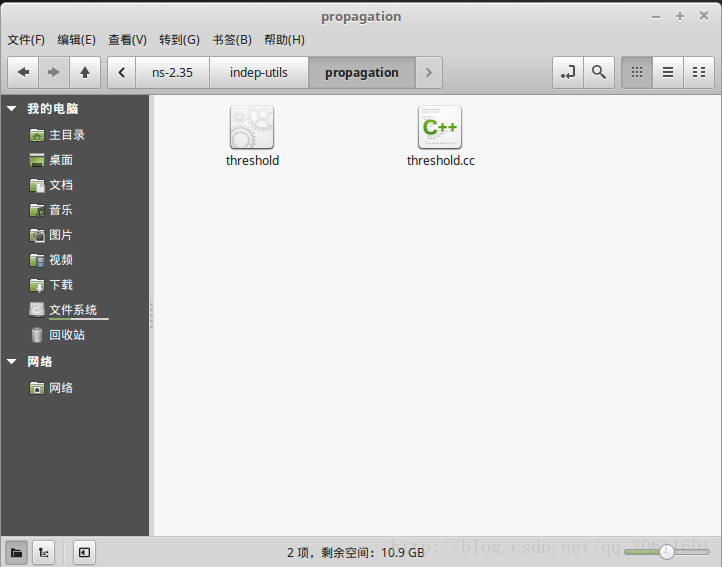
ns-2.35/indep-utils/propagation/下有个threshold工具,可以通过距离、功率等等条件算出这些参数。
我们要先对threshold.cc文件进行修改
#include “iostream.h” 修改为#include “iostream”,同时加上using namespace std;
再添加头文件:#include “cstring”
在当前目录终端输入命令,进行编译:
cd ns/indep-utils/propagation/
g++ -lm threshold.cc -o threshold
编译成功生成threshold文件
这时我们利用threshold工具就可以得到我们需要的RXThresh的值了。
./threshold -m TwoRayGround -r 1 550
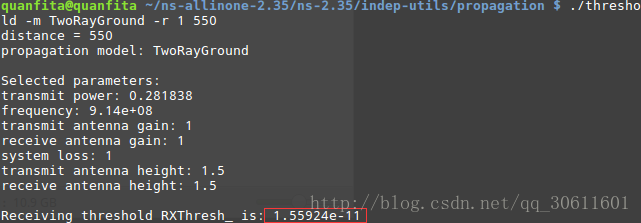
这就是我们需要的RXThresh数值,将我们新得到的数值替换之前的数值,即可改变我们无线传输的范围了。
参数设置好后,我们就可以开始仿真实验了。(中途我还修改了协议其他地方的代码,涉及到项目内容,在此不过多赘述,所以后面的数据跟GPSR协议本身跑出来的数据不大一样)
setdest生成随机场景
setdest可以随机产生无线网络仿真所需要的移动场景。
setdest程序放在 ns-2.35/indep-utils/cmu-scen-gen/setdest/目录下
usage:setdest [-nnodes][-p pause][-M maxrate][-t time][-x x][-y y]
我们需要50个节点,最大速度10m/s,持续时间20s,场景长250,宽200
./setdest -n 50-p 0.0 -M 10.0 -t 20 -x 250 -y 200 >scen_50_0_10_20_25_20
cbrgen生成数据流
cbrgen工具在ns-2.35/indep-utils/cmu-scen-gen/目录下
usage:cbrgen.tcl [-type cbr][-nn nodes][-seed seed][-mcconnections][-rate rate]
我们此时有50个节点,需要一组数据流所以,输入:
ns cbrgen.tcl -type cbr -nn 50 -seed 1 -mc 1-rate 1.0 > cbr_n50_m1_r1
重新编写tcl脚本
现在,我们把仿真需要的场景,数据流都准备好了,我们把生成的场景文件移动到gpsr协议的文件夹中,再次修改tcl脚本
添加:
source scen_50_0_10_20_25_20
source cbr_n50_m1_r1
修改完的脚本是这个样子的(这里我另存为gpsr-wireless.tcl文件):
set opt(chan) Channel/WirelessChannel
set opt(prop) Propagation/TwoRayGround
set opt(netif) Phy/WirelessPhy
set opt(mac) Mac/802_11
set opt(ifq) Queue/DropTail/PriQueue
set opt(ll) LL
set opt(ant) Antenna/OmniAntenna
set opt(x) 250
set opt(y) 200
set opt(ifqlen) 50
set opt(nn) 50
set opt(seed) 0.0
set opt(stop) 20.0
set opt(tr) trace.tr
set opt(nam) out.nam
set opt(rp) gpsr
set opt(lm) "off"
LL set mindelay_ 50us
LL set delay_ 25us
LL set bandwidth_ 0 ;# not used
Agent/Null set sport_ 0
Agent/Null set dport_ 0
Agent/CBR set sport_ 0
Agent/CBR set dport_ 0
Agent/UDP set sport_ 0
Agent/UDP set dport_ 0
Agent/UDP set packetSize_ 1460
Queue/DropTail/PriQueue setPrefer_Routing_Protocols 1
Antenna/OmniAntenna set X_ 200
Antenna/OmniAntenna set Y_ 200
Antenna/OmniAntenna set Z_ 1.5
Antenna/OmniAntenna set Gt_ 1.0
Antenna/OmniAntenna set Gr_ 1.0
#802.11p
puts "Loading IEEE802.11pconfiguration..."
source ../tcl/ex/802.11/IEEE802-11p.tcl
puts "Load complete..."
# Agent/GPSR setting
Agent/GPSR set planar_type_ 1 ;#1=GG planarize, 0=RNG planarize
Agent/GPSR set hello_period_ 5.0 ;#Hello message period
Agent/GPSR set update_sink_loc_period_ 0.5
Agent/GPSR set start_update_time_ 0.001
source ../tcl/lib/ns-bsnode.tcl
source ../tcl/mobility/com.tcl
set ns_ [new Simulator]
set chan [new $opt(chan)]
set prop [new $opt(prop)]
set topo [new Topography]
set tracefd [open $opt(tr) w]
ns_ trace-all tracefd
set namfile [open $opt(nam) w]
ns_ namtrace-all-wireless namfile opt(x)opt(y)
topo load_flatgrid opt(x) $opt(y)
prop topography topo
set god_ [create-god $opt(nn)]
$ns_ node-config -adhocRouting gpsr \
-llType $opt(ll) \
-macType $opt(mac) \
-ifqType $opt(ifq) \
-ifqLen $opt(ifqlen) \
-antType $opt(ant) \
-propType $opt(prop) \
-phyType $opt(netif) \
-channelType $opt(chan) \
-topoInstance $topo \
-agentTrace ON \
-routerTrace ON \
-macTrace OFF \
-movementTrace OFF
source ./gpsr.tcl
for {set i 0} {i < opt(nn)} {incr i} {
gpsr-create-mobile-node$i;
node_(i)namattach $namfile;
}
source scen_50_0_10_20_25_20
source cbr_n50_m1_r1
for {set i 0} {i < opt(nn) } {incr i}{
node_(i) namattach $namfile
}
for {set i 0} {i < opt(nn)} {incr i} {
ns_ initial_node_pos node_($i) 20
}
for {set i 0} {i < opt(nn)} {incr i} {
ns_at opt(stop).0 "node_(i) reset"
}
ns_ at opt(stop) "stop"
ns_ at opt(stop).01 "puts\"NSEXITING...\" ; $ns_ halt"
proc stop {} {
globalns_ tracefd namfile
$ns_flush-trace
close$tracefd
close$namfile
exit0
}
puts tracefd "M 0.0 nn opt(nn) xopt(x) y opt(y) rp $opt(rp)"
puts tracefd "M 0.0 prop opt(prop)ant $opt(ant)"
puts "Starting Simulation..."
$ns_ run
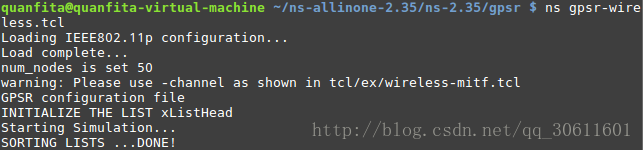
我们在此目录中打开终端,输入
ns gpsr-wireless.tcl
如图所示
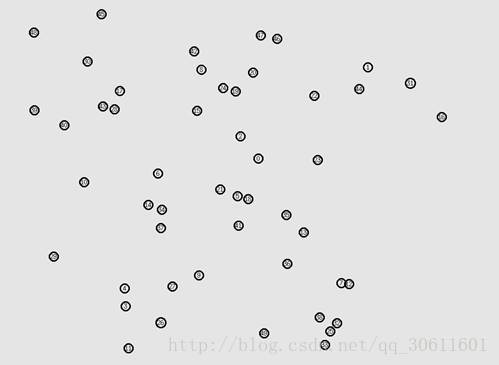
运行nam查看仿真状况
如图我们可以看到节点移动情况
trace文件分析
下面是整个仿真过程最重要的部分,trace文件分析
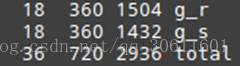
投递率我使用的是grep工具
grep “r.*AGT” trace.tr > g_r
grep “s.*AGT” trace.tr > g_s
wc g_?
即可得到数据包的发送和接收情况:
然后,我们通过awk脚本来获取协议中的时延情况:
脚本代码如下:
#BEGIN表明这是程序开头执行的一段语句,且只执行一次。
BEGIN {
#程序初始化,设定一变量以记录目前处理的封包的最大ID号码。在awk环境下变量的使用不需要声明,直接赋值。
highest_uid = 0;
}
#下面大括号里面的内容会针对要进行处理的记录(也就是我们的trace文件)的每一行都重复执行一次
{
event = 1; #1表示一行的第一栏,是事件的动作。每一栏默认是以空格分隔的。下同。
time = $2; #事件发生的时间
node_nb = $3; #发生事件的节点号(但是两边夹着“”,下面一句代码将“”处理掉)
node_nb=substr(node_nb,2,1); #第三栏的内容是形如0的节点号码,我只要得出中间的节点号码0,所以要对字符串0进行处理。
trace_type = $4; #trace文件跟踪事件的层次(指在路由层或mac层等等)
flag = $5; #
uid = $6; #包的uid号码(普通包头的uid)
pkt_type = $7; #包的类型(是信令或是数据)
pkt_size = $8; #包的大小(byte)
#下面的代码记录目前最高的CBR流的packet ID,本来的延迟分析是针对所有的包的(包括信令),这里作了简化,只针对CBR封包,以后大家做延时分析可以做相应的改动即可。
if ( event=="s" &&node_nb==0 && pkt_type=="cbr" && uid > highest_uid)
{#if判断句的前三个判断条件就不说了,第四个是说每个包的记录次数不超过1
highest_uid = uid;
}
#记录封包的传送时间
if ( event=="s" &&node_nb==0 && pkt_type=="cbr" && uid==highest_uid )
start_time[uid] = time; # start_time[]表明这是一个数组
#记录封包的接收时间
if ( event=="r" &&node_nb ==2 && pkt_type=="cbr" && uid==highest_uid )
end_time[uid] = time;
}
#END表明这是程序结束前执行的语句,也只执行一次
END {
#当每行资料都读取完毕后,开始计算有效封包的端到端延迟时间。
for ( packet_id = 0; packet_id <=highest_uid; packet_id++ )
{
start = start_time[packet_id];
end = end_time[packet_id];
packet_duration = end - start;
#只把接收时间大于传送时间的记录打印出来
if ( start < end ) printf("%d%f\n", packet_id, packet_duration);
}
}我们在终端输入命令:
gawk -f delay.awk trace.tr > delay.csv
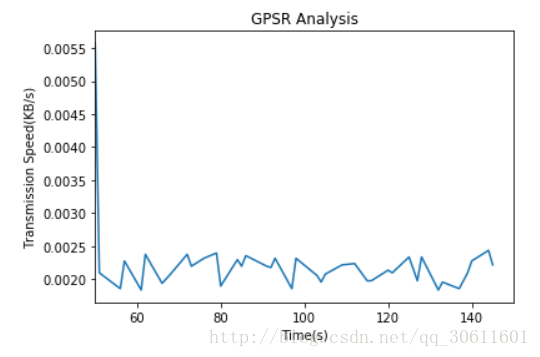
因为我本人熟悉Python语言,所以绘图我就用Python和matplotlib库来做了:
import pandas as pd
import numpy as np
import matplotlib.pyplot as plt
col = ['x','y']
data = pd.read_csv("delay.csv",names=col)
x = data['x']
y = data['y']
plt.xlabel('Time(s)')
plt.ylabel('Transmission Speed(KB/s)')
plt.title('GPSR Analysis')
plt.xlim(50,150)
plt.ylim(0.0015,0.0055)
plt.plot(x0,y0,color='blue',linewidth=1.5,linestyle="-",label='GPSR')
plt.plot(x,y,color='red',linewidth=1.5,linestyle="-",label='NNGPSR')
plt.show()得到时延的图
至此,本次ns2实验就结束了。
这篇博客写的比较匆忙,如有错误,可评论区加以说明。
个人博客:Quanfita的博客
参考文章
1
















 1872
1872











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











