






1.边缘检测的缺点
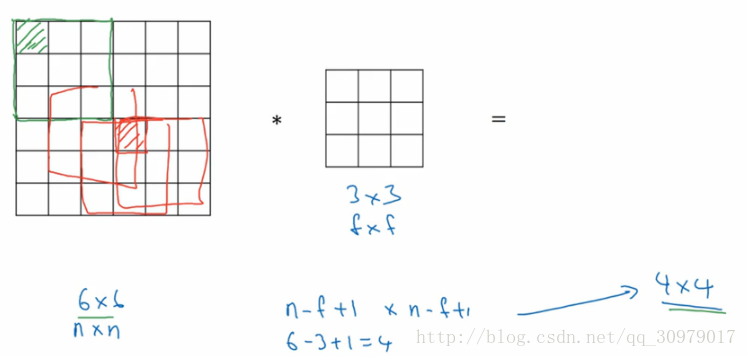
6*6矩阵与3*3矩阵卷积,得到4*4矩阵。普遍规律是 n*n 卷积 f*f 得到 n-f+1 * n-f+1。
但是存在两个缺点:
1.卷积后的矩阵越变越小(如果卷积层100层,每一层都缩小最终得到的将是很小的图片)
2.输入矩阵(左)边缘像素(绿阴影)只被计算过一次,而中间像素(红阴影)被卷积计算多次,意味着丢失图像角落信息。
为了解决这两个问题,就对输入图像进行padding,即填充像素
2.利用padding解决上述缺点
eg1:
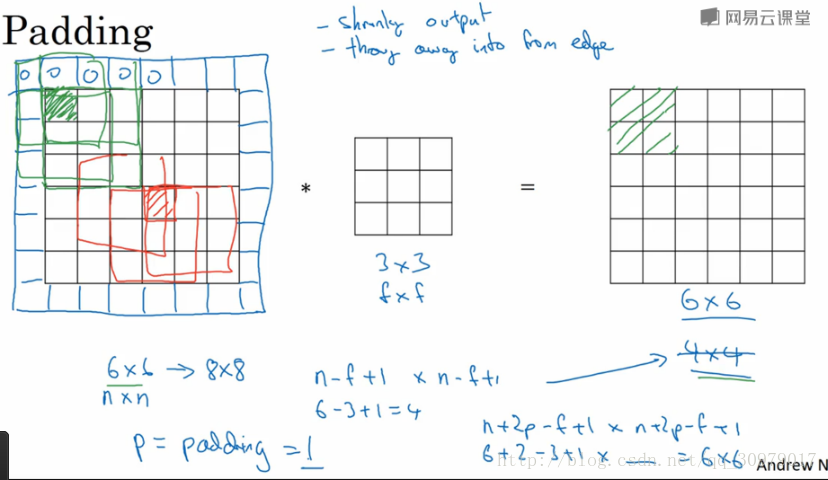
上图将输入图像矩阵周围填充一层像素(通常填充元素为0)填充数量p=1,输出图像大小变为n+2p-f+1 * n+2p-f+1,6*6——>8*8,卷积输出为6*6,与原输入图像大小相同,解决了卷积会使图片变小的缺点。(当然也可以填充两层);输出矩阵绿色阴影块是受输入矩阵绿色阴影值影响的部分,削弱了边缘信息丢失的缺点。
3.valid和same两种卷积方法

valid卷积:不填充
same卷积:填充后(p),输入(n*n)输出(n+2p-f+1 * n+2p-f+1)大小相同:

通常计算机视觉使用的滤波器矩阵f都是奇数。(可能是由于奇数f使p填充时对称;奇数f使滤波器矩阵有中心像素点,计算机视觉中方便指出滤波矩阵位置)

















 1049
1049

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









