






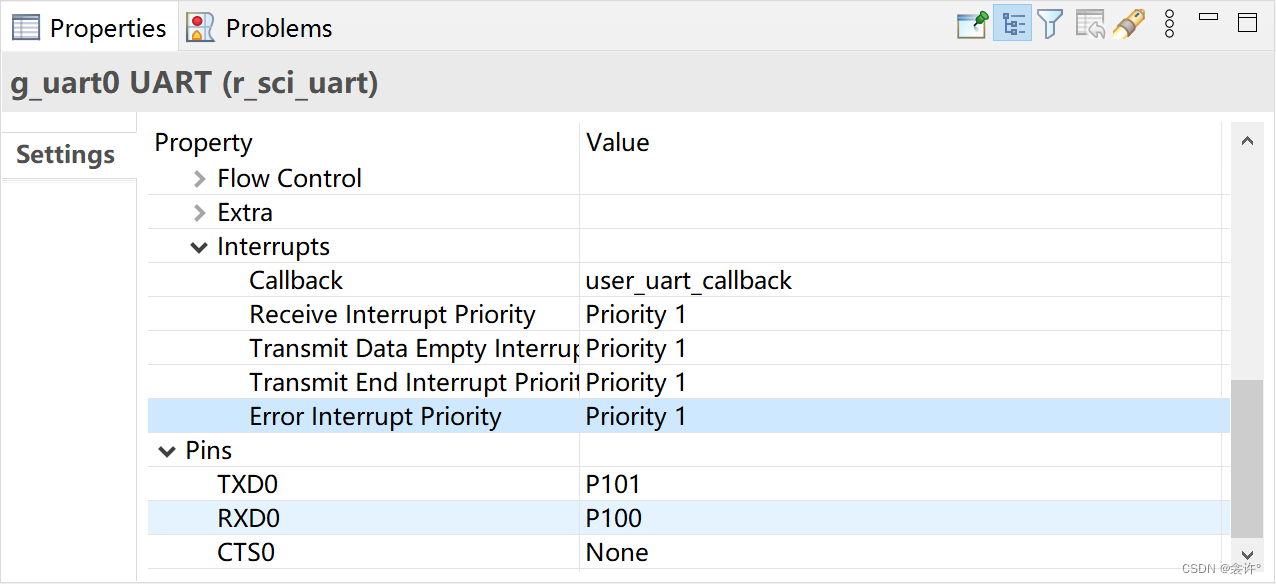
UART 配置
Stacks->New Stack -> Connectivity -> UART Driver on r_sci_uart
要改的如下,其他默认即可
printf重定向,这个你们看之前的章节,这里直接贴代码了
#include "hal_data.h"
#include <stdio.h>
FSP_CPP_HEADER
void R_BSP_WarmStart(bsp_warm_start_event_t event);
FSP_CPP_FOOTER
/*******************************************************************************************************************//**
* main() is generated by the RA Configuration editor and is used to generate threads if an RTOS is used. This function
* is called by main() when no RTOS is used.
**********************************************************************************************************************/
/*串口发送标志位和数据缓存区*/
fsp_err_t err = FSP_SUCCESS;
unsigned char send_buff[100];
volatile bool uart_send_complete_flag = false;
void user_uart_callback (uart_callback_args_t * p_args)
{
if(p_args->event == UART_EVENT_TX_COMPLETE)
{
uart_send_complete_flag = true;
}
}
/*无语,例程是错的,以下是更改的*/
//#ifdef __GNUC__ //串口重定向
//#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
//#else
//#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
//#endif
/*printf()重定向*/
int fputc(int ch, FILE *f)
{
err = R_SCI_UART_Write(&g_uart0_ctrl, (uint8_t *)&ch, 1);
if(FSP_SUCCESS != err) __BKPT();
while(uart_send_complete_flag == false){}
uart_send_complete_flag = false;
return 0;
}
//int _write(int fd,char *pBuffer,int size)
//{
// for(int i=0;i<size;i++)
// {
// __io_putchar(*pBuffer++);
// }
// return size;
//}回调函数 user_uart_callback ():若接收到新的数据,使用 R_GPT_Reset 进行充值定时器计数
volatile bool uart_send_complete_flag = false;uint8_t RxBuff[1];// 进入中断接收数据的数组uint8_t DataBuff[5000]; // 保存接收到的数据的数组int RxLine=0;// 接收到的数据长度int Rx_flag=0;// 接受到数据标志int Rx_flag_finish=0; // 接受完成或者时间溢出void user_uart_callback (uart_callback_args_t * p_args){if(p_args->event == UART_EVENT_TX_COMPLETE){uart_send_complete_flag = true;}if(p_args->event == UART_EVENT_RX_CHAR){RxBuff[0] = p_args->data;RxLine++;//每接收到一个数据,进入回调数据长度加 1DataBuff[RxLine-1]=RxBuff[0]; //把每次接收到的数据保存到缓存数组Rx_flag=1;if(RxBuff[0]==0xff)//接收结束标志位,这个数据可以自定义,根据实际需求,这里只做示例使用,不一定是 0xff{Rx_flag_finish=1;}RxBuff[0]=0;err = R_GPT_Reset(&g_timer0_ctrl);assert(FSP_SUCCESS == err);}}
printf_usart 打印函数:打印已经接受的数据以及其长度
void printf_usart(void){printf("length=%d\r\n",RxLine);for(int i=0;i<RxLine;i++)printf("data:[%d] = 0x%x\r\n",i,DataBuff[i]);memset(DataBuff,0,sizeof(DataBuff)); //清空缓存数组//memset()作用:可以方便的清空一个结构类型的变量或数组。//例句: memset(aTxbuffer,0,sizeof(aTxbuffer)) 用 memset 清空 aTxbuffer 。RxLine=0; //清空接收长度Rx_flag_finish=0;Rx_flag = 0;}
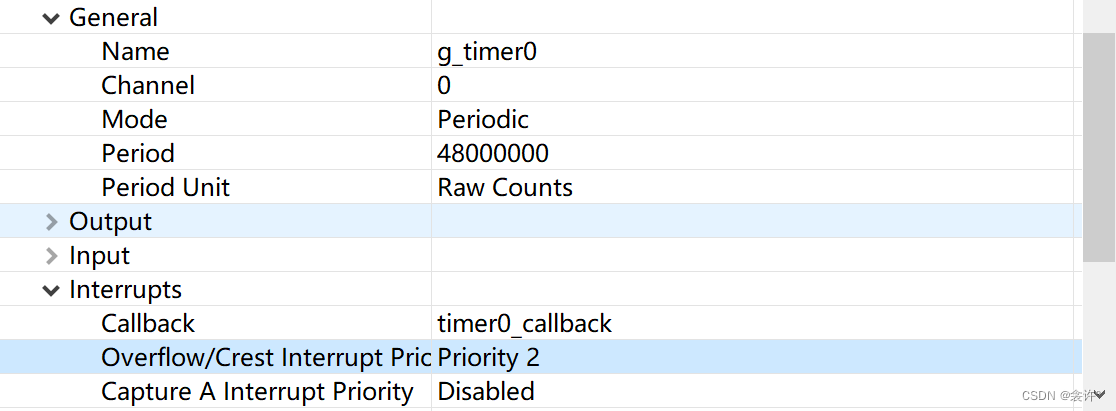
定时器设置:Stacks->New Stack->Timers -> Timers Driver on r_gpt
定时器回调函数 timer0_callback()
/* Callback function */void timer0_callback (timer_callback_args_t *p_args){/* TODO: add your own code here */if (TIMER_EVENT_CYCLE_END == p_args-> event ){if (Rx_flag== 1 ){printf_usart();Rx_flag= 0 ;}}}
示例代码:
#include "hal_data.h"#include <stdio.h>FSP_CPP_HEADERvoid R_BSP_WarmStart ( bsp_warm_start_event_t event); FSP_CPP_FOOTERvoid printf_usart ( void );fsp_err_t err = FSP_SUCCESS ;volatile bool uart_send_complete_flag = false;uint8_t RxBuff[1];// 进入中断接收数据的数组uint8_t DataBuff[5000]; // 保存接收到的数据的数组int RxLine=0;// 接收到的数据长度int Rx_flag=0;// 接受到数据标志int Rx_flag_finish=0;// 接受完成或者时间溢出void user_uart_callback ( uart_callback_args_t * p_args){if (p_args-> event == UART_EVENT_TX_COMPLETE ){uart_send_complete_flag = true;}if (p_args-> event ==UART_EVENT_RX_CHAR ){RxBuff[0] = p_args-> data ;RxLine++;// 每接收到一个数据,进入回调数据长度加 1DataBuff[RxLine-1]=RxBuff[0]; // 把每次接收到的数据保存到缓存数组Rx_flag=1;if (RxBuff[0]==0xff)// 接收结束标志位,这个数据可以自定义,根据实际需求,这里只做示例使用,不一定是 0xff{Rx_flag_finish=1;}RxBuff[0]=0;err = R_GPT_Reset(&g_timer0_ctrl);assert( FSP_SUCCESS == err);}}#ifdef __GNUC__// 串口重定向#define PUTCHAR_PROTOTYPE int __io_putchar( int ch)#else#define PUTCHAR_PROTOTYPE int fputc( int ch, FILE *f)#endifPUTCHAR_PROTOTYPE{err = R_SCI_UART_Write(&g_uart0_ctrl, ( uint8_t *)&ch, 1);if ( FSP_SUCCESS != err) __BKPT();while (uart_send_complete_flag == false){} uart_send_complete_flag = false;return ch;}int _write ( int fd, char *pBuffer, int size){for ( int i=0;i<size;i++){__io_putchar(*pBuffer++);}return size;}/* Callback function */void timer0_callback ( timer_callback_args_t *p_args){/* TODO : add your own code here */if ( TIMER_EVENT_CYCLE_END == p_args-> event ){if (Rx_flag==1){printf_usart();Rx_flag=0;}}}void hal_entry ( void ){/* TODO : add your own code here *//* Open the transfer instance with initial configuration. */err = R_SCI_UART_Open(&g_uart0_ctrl, &g_uart0_cfg);assert( FSP_SUCCESS == err);/* Initializes the module. */err = R_GPT_Open(&g_timer0_ctrl, &g_timer0_cfg);/* Handle any errors. This function should be defined by the user. */assert( FSP_SUCCESS == err);/* Start the timer. */( void ) R_GPT_Start(&g_timer0_ctrl);while (1){R_BSP_SoftwareDelay(1, BSP_DELAY_UNITS_MILLISECONDS ); // NOLINT100->160if (Rx_flag_finish==1){printf_usart();}} #if BSP_TZ_SECURE_BUILD/* Enter non-secure code */R_BSP_NonSecureEnter();#endif}void printf_usart ( void ){printf ( "length=%d\r\n" ,RxLine);for ( int i=0;i<RxLine;i++)printf ( "data:[%d] = 0x%x\r\n" ,i,DataBuff[i]);memset (DataBuff,0, sizeof (DataBuff)); // 清空缓存数组//memset() 作用:可以方便的清空一个结构类型的变量或数组。// 例句: memset(aTxbuffer,0,sizeof(aTxbuffer)) 用 memset 清空 aTxbuffer 。RxLine=0; // 清空接收长度Rx_flag_finish=0;Rx_flag = 0;}
实验现象:发送数据,500ms发送一个















 1294
1294











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









