







遥感影像阴影指因倾斜照射,地物自身遮挡能源而造成影像上的暗色调,它反映了地物的空间结构特征,阴影不仅增强立体感,而且它的形状和轮廓还显示了地物的高度和侧面形状,有助于地物的识别。
遥感影像阴影,可根据侧影的长度和照射角度,推算出地物的高度;当然阴影也会拖盖一些信息,给解译工作带来麻烦。所以出发的目的不同,评判就不一。
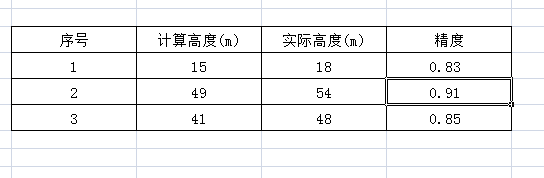
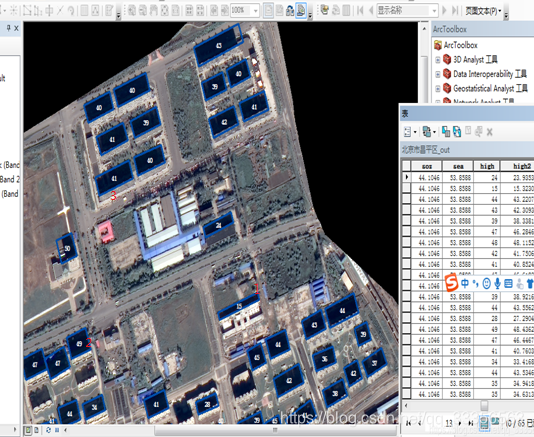
提取精度:83%以上(验证三处)
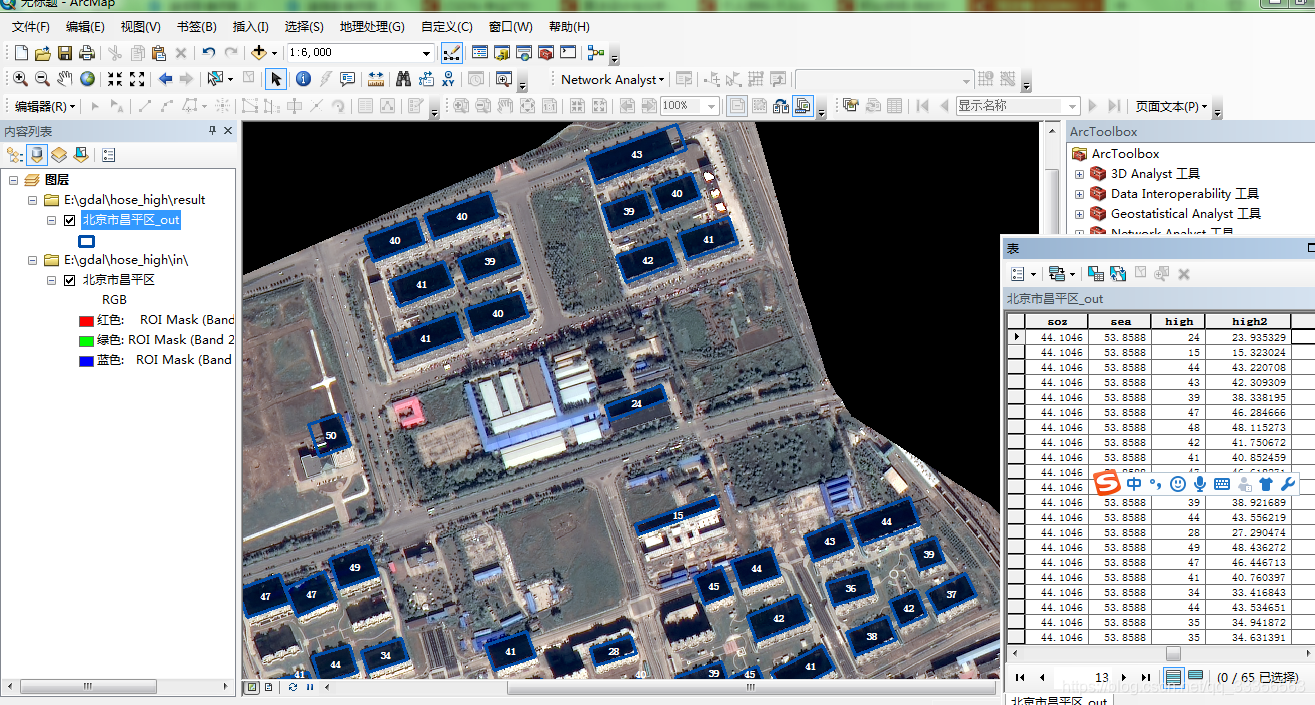
先上图,为提取效果:
具体方法及步骤:
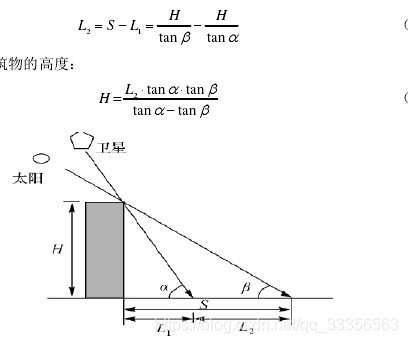
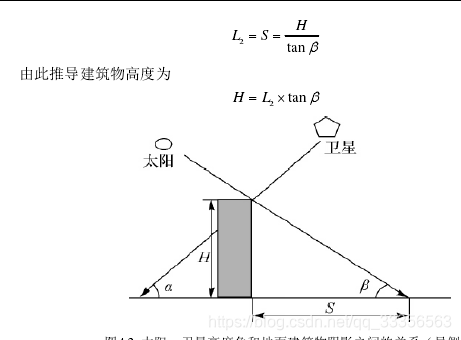
首先进行阴影提取,然后计算太阳方位角方向的阴影边长,根据三角函数相关公式计算得到建筑物高度,通过分析太阳和卫星天顶角存在a,b两种情况: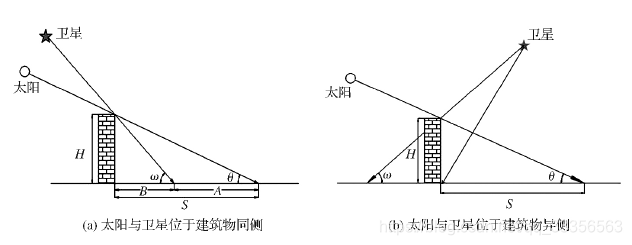
数据来源:遥感集市样例数据,下载方法参照:https://mp.csdn.net/postedit/81124974
数据获取时间:2014-09-27 11:04:41(仅作为练习操作使用)
具体步骤:
步骤一:对原始数据进行预处理,包括辐射定标、正射校正、大气校正和影像融合。
步骤二:进行ROI选择,平均光谱角分类(具体参照:https://blog.csdn.net/qq_33356563/article/details/84578113)。
步骤三:分类后处理---小斑点处理(Majority和Minority分析 )。
步骤四:栅格转矢量。
步骤五:剔除异常矢量值(根据面积大小)。
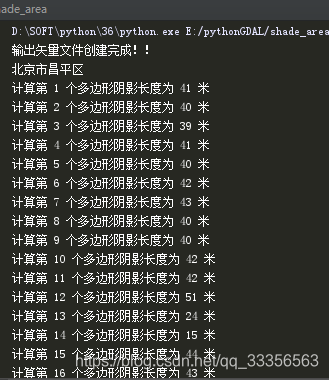
步骤六:阴影长度计算(Python+GDAL)
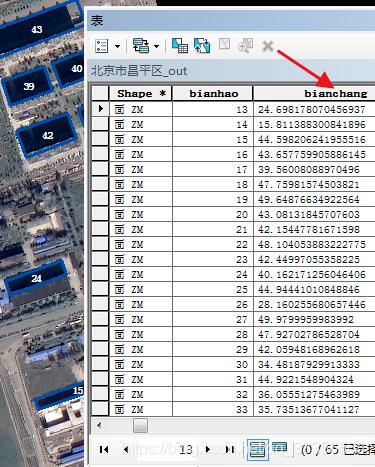
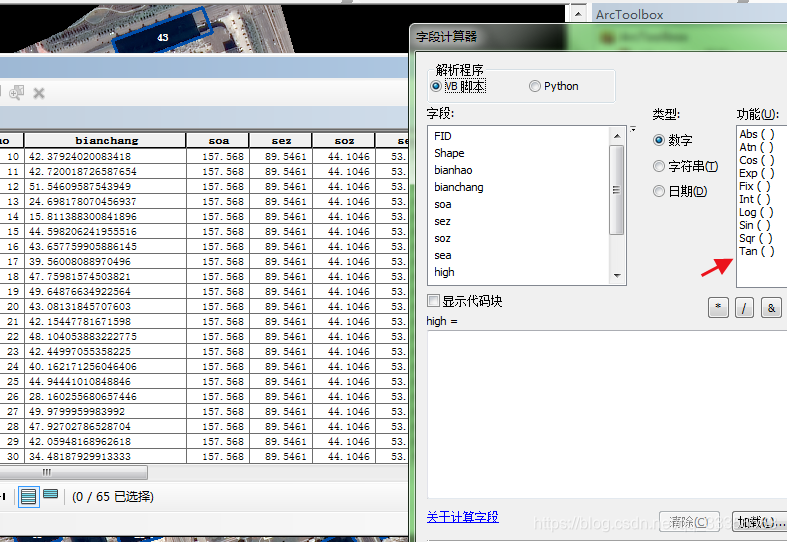
步骤七:ArcGIS中进行字段计算器计算值(注意:角度与弧度的转换)
计算公式:
精度粗略估计:
街景地图验证:
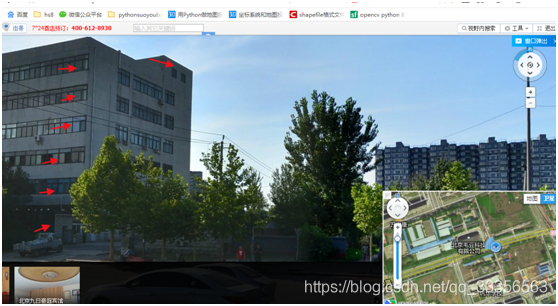
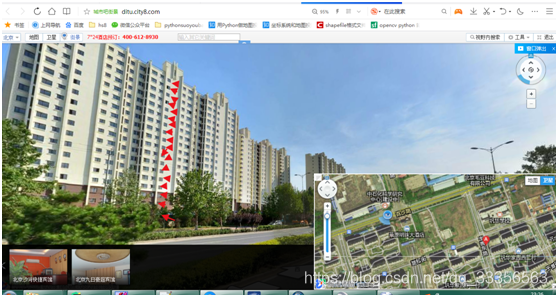
说明:主旨在于参考论文思路的实现,精度不高的原因自我分析主要在于:1.阴影边缘的处理;2.阴影长度的提取。

















 2873
2873

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









