







cv2.fitEllipse函数详解:ellipse参数并根据参数计算出椭圆焦点坐标
最近因为用到了这个函数,所以就趁着这个机会,好好顺顺,做下记录。
ellipse = cv2.fitEllipse(cnt)
#(x, y), (a, b), angle = cv2.fitEllipse(cnt)
#ellipse = [ (x, y) , (a, b), angle ]
ellipse 为元组类型,其里面的参数为:
- (x, y)代表椭圆中心点的位置
- (a, b)代表长短轴长度,应注意a、b为长短轴的直径,而非半径
angle 代表了中心旋转的角度
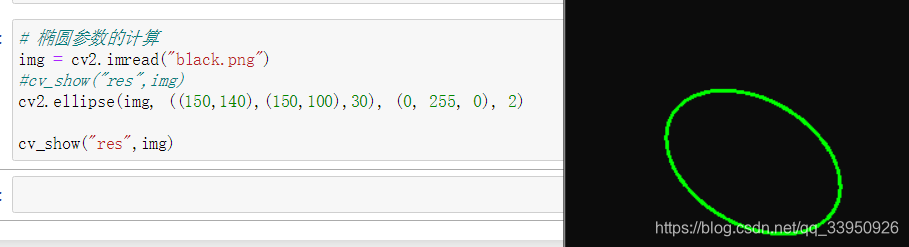
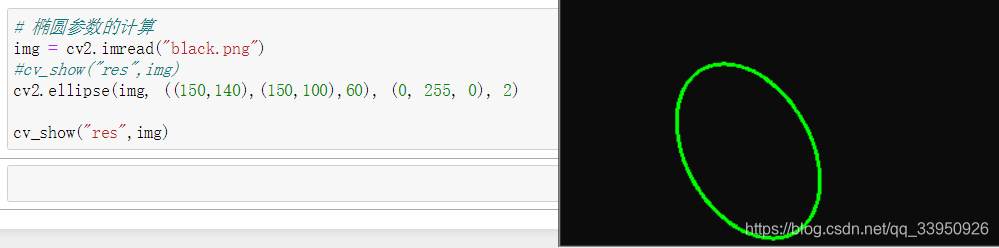
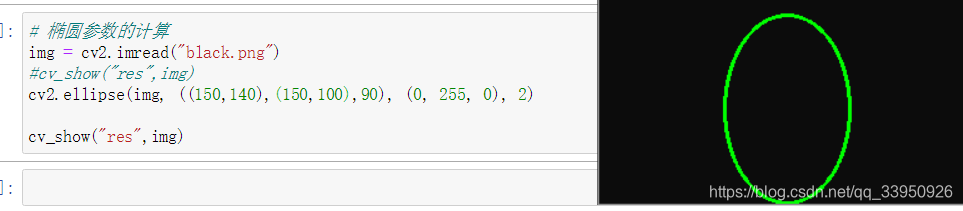
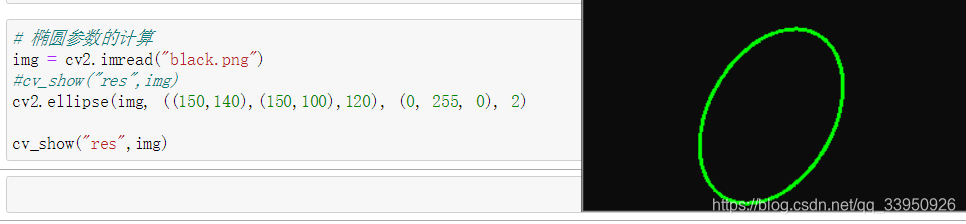
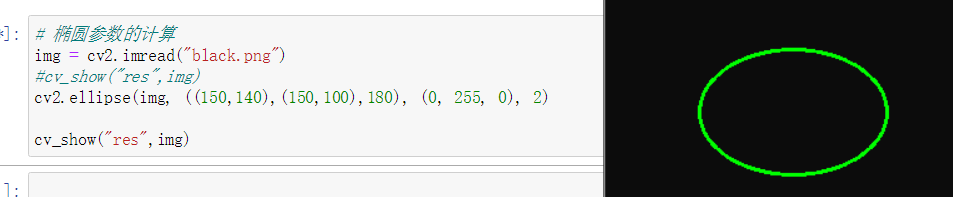
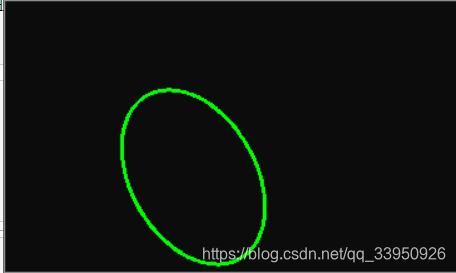
椭圆参数角度效果
旋转30°
旋转60°
旋转90°
旋转120°
旋转150°
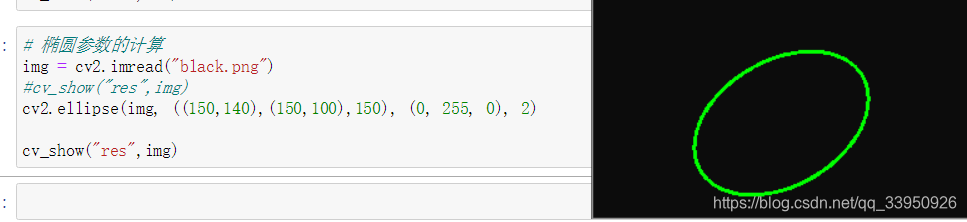
旋转180°
旋转210°
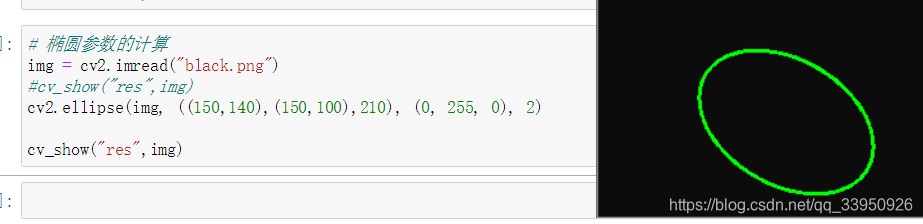
从上图看应该是旋转180°以内和180°到360°是一样的。
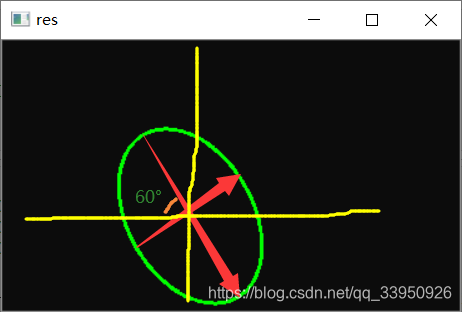
椭圆焦点坐标的计算
对于一个旋转60°椭圆,如下:
则根据高中数学知识易得:
根据上图和其他参数,可以很简单的用下面的代码计算出来点的坐标:
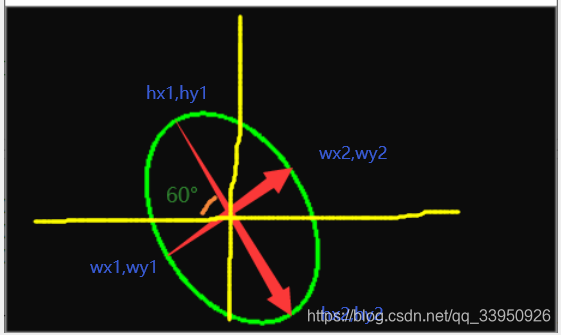
计算代码如下:
#画长宽
res_ellipse = ((150,140),(150,100),60)
ell_center_x = int(res_ellipse[0][0])
ell_center_y = int(res_ellipse[0][1])
ell_h_point1_x = int(ell_center_x - 0.5 * res_ellipse[1][0] * math.cos(res_ellipse[2]/ 180 * math.pi))
ell_h_point1_y = int(ell_center_y - 0.5 * res_ellipse[1][0]* math.sin(res_ellipse[2]/ 180 * math.pi))
ell_h_point2_x = int(ell_center_x + 0.5 * res_ellipse[1][0] * math.cos(res_ellipse[2]/ 180 * math.pi))
ell_h_point2_y = int(ell_center_y + 0.5 * res_ellipse[1][0]* math.sin(res_ellipse[2]/ 180 * math.pi))
ell_w_point1_x = int(ell_center_x - 0.5 * res_ellipse[1][1] * math.sin(res_ellipse[2]/ 180 * math.pi))
ell_w_point1_y = int(ell_center_y + 0.5 * res_ellipse[1][1]* math.cos(res_ellipse[2]/ 180 * math.pi))
ell_w_point2_x = int(ell_center_x + 0.5 * res_ellipse[1][1] * math.sin(res_ellipse[2]/ 180 * math.pi))
ell_w_point2_y = int(ell_center_y - 0.5 * res_ellipse[1][1]* math.cos(res_ellipse[2]/ 180 * math.pi))
cv2.line(img,(ell_h_point1_x,ell_h_point1_y),(ell_h_point2_x,ell_h_point2_y),(0,255,255),thickness=2)
cv2.line(img,(ell_w_point1_x,ell_w_point1_y),(ell_w_point2_x,ell_w_point2_y),(0,255,255),thickness=2)
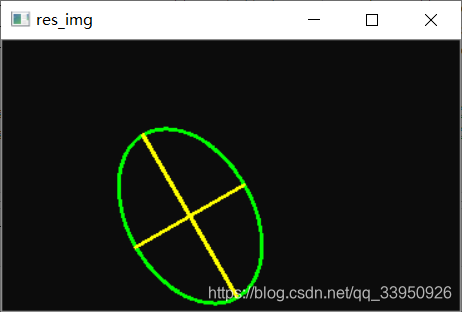
最终效果图:
对于角度为240°(180+60)的椭圆,计算效果如下:
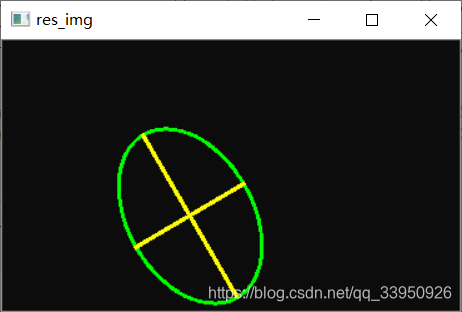
可以看出来没有影响。
完整代码如下:
其中"black.png“ 就是我随便截取的一个黑色背景。
import os
import numpy as np
from matplotlib import pyplot as plt
from PIL import Image
import cv2
from PIL import ImageEnhance
import math
def cv_show(name,file):
cv2.imshow(name, file)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 椭圆参数的计算
img = cv2.imread("black.png")
#cv_show("res",img)
cv2.ellipse(img, ((150,140),(150,100),60), (0, 255, 0), 2)
cv_show("res",img)
#画长宽
res_ellipse = ((150,140),(150,100),60)
ell_center_x = int(res_ellipse[0][0])
ell_center_y = int(res_ellipse[0][1])
ell_h_point1_x = int(ell_center_x - 0.5 * res_ellipse[1][0] * math.cos(res_ellipse[2]/ 180 * math.pi))
ell_h_point1_y = int(ell_center_y - 0.5 * res_ellipse[1][0]* math.sin(res_ellipse[2]/ 180 * math.pi))
ell_h_point2_x = int(ell_center_x + 0.5 * res_ellipse[1][0] * math.cos(res_ellipse[2]/ 180 * math.pi))
ell_h_point2_y = int(ell_center_y + 0.5 * res_ellipse[1][0]* math.sin(res_ellipse[2]/ 180 * math.pi))
ell_w_point1_x = int(ell_center_x - 0.5 * res_ellipse[1][1] * math.sin(res_ellipse[2]/ 180 * math.pi))
ell_w_point1_y = int(ell_center_y + 0.5 * res_ellipse[1][1]* math.cos(res_ellipse[2]/ 180 * math.pi))
ell_w_point2_x = int(ell_center_x + 0.5 * res_ellipse[1][1] * math.sin(res_ellipse[2]/ 180 * math.pi))
ell_w_point2_y = int(ell_center_y - 0.5 * res_ellipse[1][1]* math.cos(res_ellipse[2]/ 180 * math.pi))
cv2.line(img,(ell_h_point1_x,ell_h_point1_y),(ell_h_point2_x,ell_h_point2_y),(0,255,255),thickness=2)
cv2.line(img,(ell_w_point1_x,ell_w_point1_y),(ell_w_point2_x,ell_w_point2_y),(0,255,255),thickness=2)
cv_show("res_img",img)


















 3386
3386

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











