






model = dict(
type='Recognizer3D',
backbone=dict(
type='ResNet3dSlowOnly',
depth=50,
conv1_kernel=(1, 7, 7),
inflate=(0, 0, 1, 1)),
cls_head=dict(
type='I3DHead',
in_channels=2048,
num_classes=60,
dropout=0.5),
test_cfg = dict(average_clips='prob'))
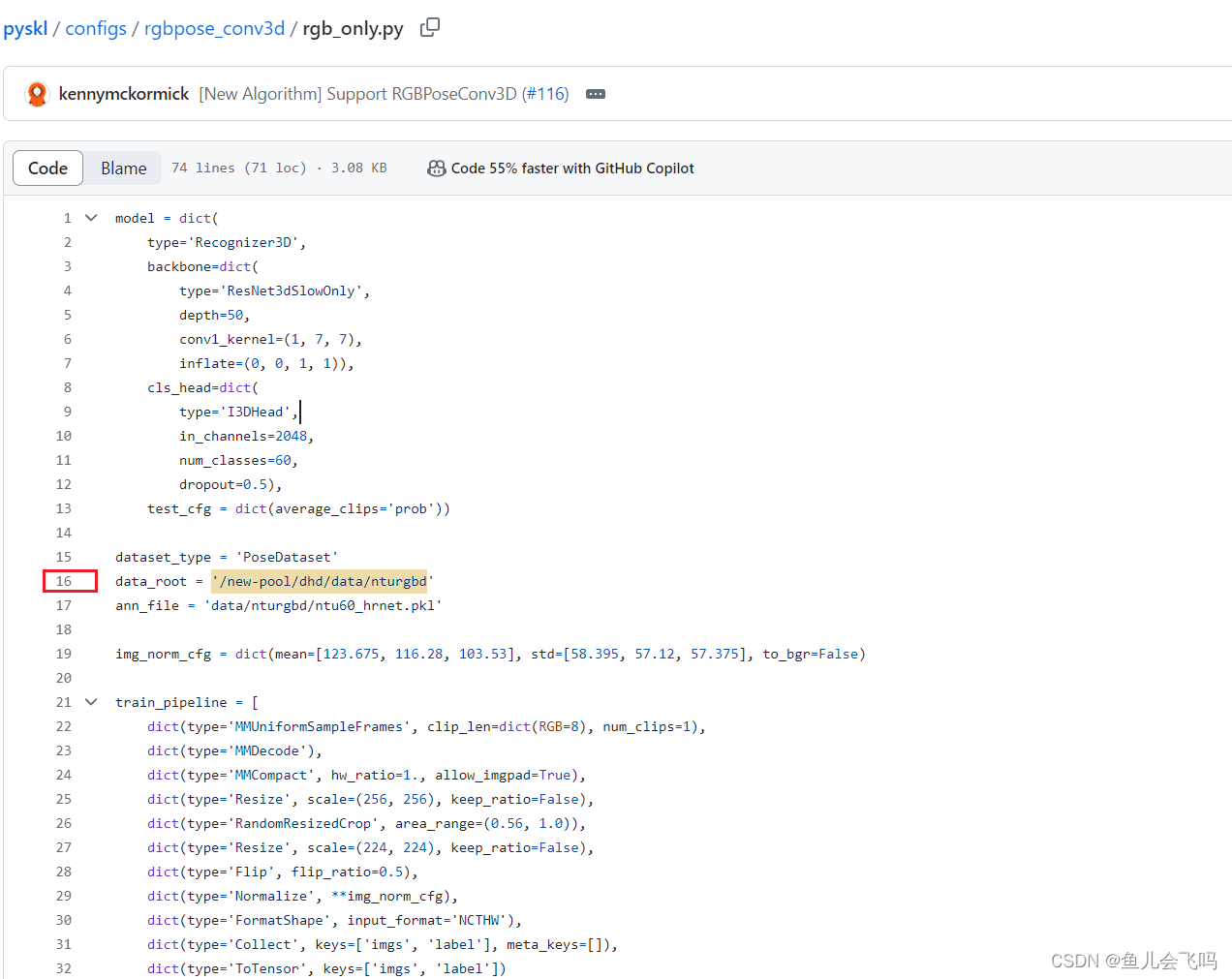
dataset_type = 'PoseDataset'
data_root = '/new-pool/dhd/data/nturgbd'
ann_file = 'data/nturgbd/ntu60_hrnet.pkl'
img_norm_cfg = dict(mean=[123.675, 116.28, 103.53], std=[58.395, 57.12, 57.375], to_bgr=False)
train_pipeline = [
dict(type='MMUniformSampleFrames', clip_len=dict(RGB=8), num_clips=1),
dict(type='MMDecode'),
dict(type='MMCompact', hw_ratio=1., allow_imgpad=True),
dict(type='Resize', scale=(256, 256), keep_ratio=False),
dict(type='RandomResizedCrop', area_range=(0.56, 1.0)),
dict(type='Resize', scale=(224, 224), keep_ratio=False),
dict(type='Flip', flip_ratio=0.5),
dict(type='Normalize', **img_norm_cfg),
dict(type='FormatShape', input_format='NCTHW'),
dict(type='Collect', keys=['imgs', 'label'], meta_keys=[]),
dict(type='ToTensor', keys=['imgs', 'label'])
]
val_pipeline = [
dict(type='MMUniformSampleFrames', clip_len=dict(RGB=8), num_clips=1),
dict(type='MMDecode'),
dict(type='MMCompact', hw_ratio=1., allow_imgpad=True),
dict(type='Resize', scale=(224, 224), keep_ratio=False),
dict(type='Normalize', **img_norm_cfg),
dict(type='FormatShape', input_format='NCTHW'),
dict(type='Collect', keys=['imgs', 'label'], meta_keys=[]),
dict(type='ToTensor', keys=['imgs'])
]
test_pipeline = [
dict(type='MMUniformSampleFrames', clip_len=dict(RGB=8), num_clips=10),
dict(type='MMDecode'),
dict(type='MMCompact', hw_ratio=1., allow_imgpad=True),
dict(type='Resize', scale=(224, 224), keep_ratio=False),
dict(type='Normalize', **img_norm_cfg),
dict(type='FormatShape', input_format='NCTHW'),
dict(type='Collect', keys=['imgs', 'label'], meta_keys=[]),
dict(type='ToTensor', keys=['imgs'])
]
data = dict(
videos_per_gpu=12,
workers_per_gpu=4,
val_dataloader=dict(videos_per_gpu=1),
test_dataloader=dict(videos_per_gpu=1),
train=dict(
type='RepeatDataset',
times=10,
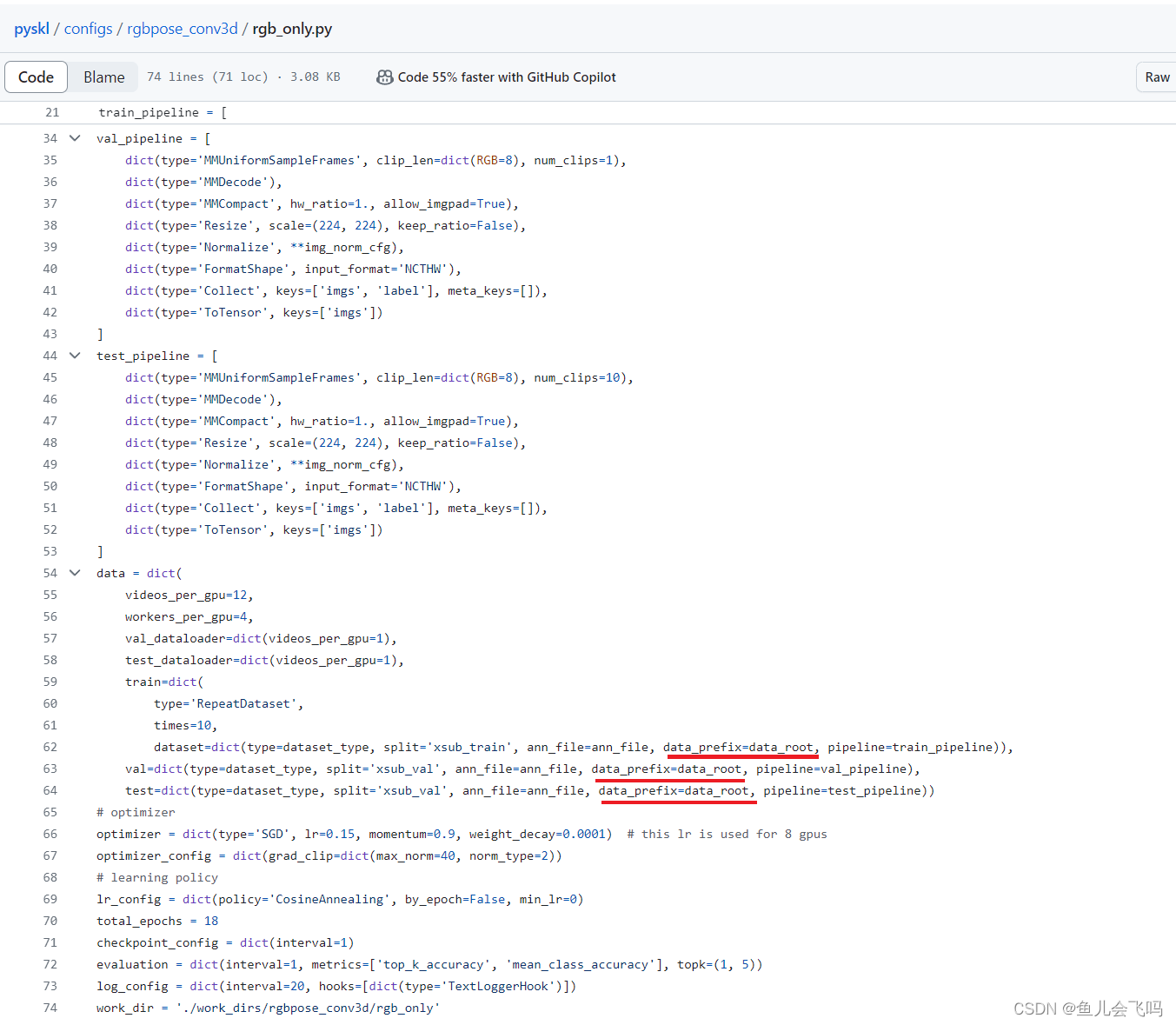
dataset=dict(type=dataset_type, split='xsub_train', ann_file=ann_file, data_prefix=data_root, pipeline=train_pipeline)),
val=dict(type=dataset_type, split='xsub_val', ann_file=ann_file, data_prefix=data_root, pipeline=val_pipeline),
test=dict(type=dataset_type, split='xsub_val', ann_file=ann_file, data_prefix=data_root, pipeline=test_pipeline))
# optimizer
optimizer = dict(type='SGD', lr=0.15, momentum=0.9, weight_decay=0.0001) # this lr is used for 8 gpus
optimizer_config = dict(grad_clip=dict(max_norm=40, norm_type=2))
# learning policy
lr_config = dict(policy='CosineAnnealing', by_epoch=False, min_lr=0)
total_epochs = 18
checkpoint_config = dict(interval=1)
evaluation = dict(interval=1, metrics=['top_k_accuracy', 'mean_class_accuracy'], topk=(1, 5))
log_config = dict(interval=20, hooks=[dict(type='TextLoggerHook')])
work_dir = './work_dirs/rgbpose_conv3d/rgb_only'dataset_type = 'PoseDataset'
data_root = '/new-pool/dhd/data/nturgbd'
ann_file = 'data/nturgbd/ntu60_hrnet.pkl'
img_norm_cfg = dict(mean=[123.675, 116.28, 103.53], std=[58.395, 57.12, 57.375], to_bgr=False)定义了数据集的相关信息。dataset_type 是数据集的类型,这里是 'PoseDataset'。data_root 是数据集的根目录的路径,ann_file 是数据集的注释文件的路径。
img_norm_cfg 定义了图像的归一化配置。mean 是一个长度为 3 的列表,表示图像的均值,std 是一个长度为 3 的列表,表示图像的标准差。to_bgr 表示是否将图像转换为 BGR 格式。
data_root 变量表示数据集的根目录路径。在这个路径下,可以找到包含训练数据、验证数据和测试数据的子文件夹或文件。具体的数据组织方式可能因数据集而异,但通常会有类似以下的结构:
data_root/
├── train/
├── val/
└── test/在这个示例中,data_root 指向的是数据集的根目录。train/ 子文件夹包含训练集数据,val/ 子文件夹包含验证集数据,test/ 子文件夹包含测试集数据。
您可以根据您的实际数据集的组织方式来设置 data_root 变量,确保它指向包含相应数据子文件夹的路径。这样模型在训练、验证或测试时就可以根据 data_root 变量找到相应的数据。
那为什么还new-pool/dhd?
/new-pool/dhd 是与 data_root 变量相结合使用的完整路径。在代码中,data_root 变量指向的是数据集的根目录路径,而 /new-pool/dhd 是数据集的具体存储位置。
具体来说,data_root 表示数据集的根目录路径,而 /new-pool/dhd 是根目录路径的一部分,用来指定数据集存储在哪个具体的目录或位置上。这种情况下,/new-pool/dhd 可能是一个服务器或存储设备中的路径,用来表示数据集的存储位置。
您需要根据您的实际情况,将 data_root 设置为正确的根目录路径,以及将 /new-pool/dhd 替换为您实际的数据集存储位置的路径。
请确保在设置 data_root 时使用了正确的路径,并根据您的实际情况进行相应的调整。
参考:
pyskl/configs/rgbpose_conv3d/rgb_only.py at main · kennymckormick/pyskl · GitHub















 4112
4112

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









