







 超级会员免费看
超级会员免费看
 本文详细介绍了基于STM32的智能小车循迹设计,包括循迹小车的工作原理、常见赛道、循迹方法,重点讨论了红外传感器的原理,并给出了三路循迹控制逻辑和控制流程图,最后提到了软件驱动代码的编写。
本文详细介绍了基于STM32的智能小车循迹设计,包括循迹小车的工作原理、常见赛道、循迹方法,重点讨论了红外传感器的原理,并给出了三路循迹控制逻辑和控制流程图,最后提到了软件驱动代码的编写。
基于STM32的智能小车
第一章 基于STM32的智能小车方案设计
第二章 基于STM32的智能小车–电机驱动设计
前言
本篇主要针对某宝上制作智能小车过程中用到的循迹设计进行统一阐述,为大家提供参考。
一、什么是循迹小车
使用一定的循迹方法,使得小车自动循着赛道运行的技术,就是 循迹技术,这样的循迹小车又称为简单的循迹机器人。
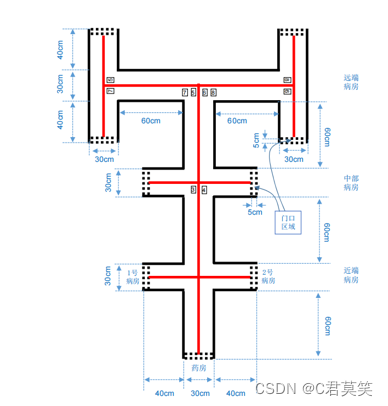
二、常见循迹赛道
底色一般是白色,赛道一般为单条或双条黑线,具有直道、普通弯道、交叉、180度转弯、 连续波浪弯道等 。
第一章 基于STM32的智能小车方案设计
第二章 基于STM32的智能小车–电机驱动设计
本篇主要针对某宝上制作智能小车过程中用到的循迹设计进行统一阐述,为大家提供参考。
使用一定的循迹方法,使得小车自动循着赛道运行的技术,就是 循迹技术,这样的循迹小车又称为简单的循迹机器人。
底色一般是白色,赛道一般为单条或双条黑线,具有直道、普通弯道、交叉、180度转弯、 连续波浪弯道等 。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文


























