







原文链接
神经网络特征提取过程中,一般底层特征具有良好的空间信息,高层的具有良好的语义信息。原来多数的object detection算法都是只采用顶层特征做预测,但我们知道低层的特征语义信息比较少,但是目标位置准确;高层的特征语义信息比较丰富,但是目标位置比较粗略。另外虽然也有些算法采用多尺度特征融合的方式,但是一般是采用融合后的特征做预测,而本文不一样的地方在于预测是在不同特征层独立进行的。
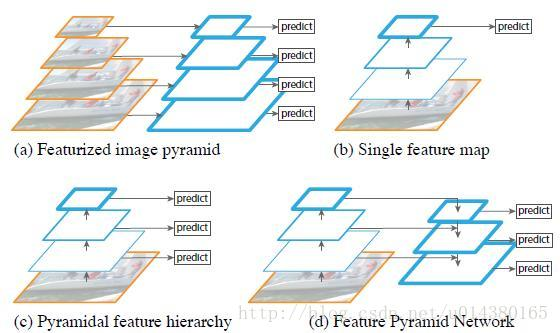
下图FIg1展示了4种利用特征的形式:
(a)图像金字塔,即将图像做成不同的scale,然后不同scale的图像生成对应的不同scale的特征。这种方法的缺点在于增加了时间成本。有些算法会在测试时候采用图像金字塔。
(b)像SPP net,Fast RCNN,Faster RCNN是采用这种方式,即仅采用网络最后一层的特征。
(c)像SSD(Single Shot Detector)采用这种多尺度特征融合的方式,没有上采样过程,即从网络不同层抽取不同尺度的特征做预测,这种方式不会增加额外的计算量。作者认为SSD算法中没有用到足够低层的特征(在SSD中,最低层的特征是VGG网络的conv4_3),而在作者看来足够低层的特征对于检测小物体是很有帮助的。
(d)本文作者是采用这种方式,顶层特征通过上采样和低层特征做融合,而且每层都是独立预测的。
如下图Fig2。上面一个带有skip connection的网络结构在预测的时候是在finest level(自顶向下的最后一层)进行的,简单讲就是经过多次上采样并融合特征到最后一步,拿最后一步生成的特征做预测。而下面一个网络结构和上面的类似,区别在于预测是在每一层中独立进行的。后面有这两种结构的实验结果对比,非常有意思,因为之前只见过使用第一种特征融合的方式。 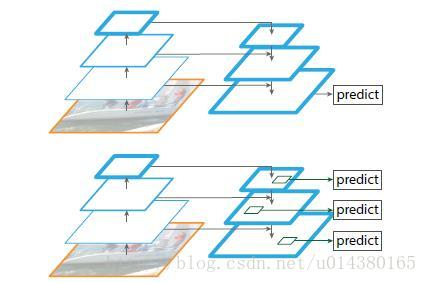
作者的主网络采用ResNet
算法结构大致如下Fig3:一个自底向上的线路,一个自顶向下的线路,横向连接(lateral connection)。
图中放大的区域就是横向连接,这里1*1的卷积核的主要作用是减少卷积核的个数,也就是减少了feature map的个数,并不改变feature map的尺寸大小。 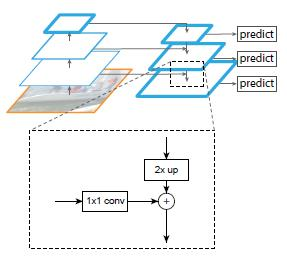
自底向上其实就是网络的前向过程。在前向过程中,feature map的大小在经过某些层后会改变,而在经过其他一些层的时候不会改变,作者将不改变feature map大小的层归为一个stage,因此每次抽取的特征都是每个stage的最后一个层输出,这样就能构成特征金字塔。
自顶向下的过程采用上采样(upsampling)进行,而横向连接则是将上采样的结果和自底向上生成的相同大小的feature map进行融合(merge)。在融合之后还会再采用3*3的卷积核对每个融合结果进行卷积,目的是消除上采样的混叠效应(aliasing effect)。并假设生成的feature map结果是P2,P3,P4,P5,和原来自底向上的卷积结果C2,C3,C4,C5一一对应。
作者一方面将FPN放在RPN网络中用于生成proposal,原来的RPN网络是以主网络的某个卷积层输出的feature map作为输入,简单讲就是只用这一个尺度的feature map。但是现在要将FPN嵌在RPN网络中,生成不同尺度特征并融合作为RPN网络的输入。在每一个scale层,都定义了不同大小的anchor,对于P2,P3,P4,P5,P6这些层,定义anchor的大小为32^2,64^2,128^2,256^2,512^2,另外每个scale层都有3个长宽对比度:1:2,1:1,2:1。所以整个特征金字塔有15种anchor。
正负样本的界定和Faster RCNN差不多:如果某个anchor和一个给定的ground truth有最高的IOU或者和任意一个Ground truth的IOU都大于0.7,则是正样本。如果一个anchor和任意一个ground truth的IOU都小于0.3,则为负样本。
看看加入FPN的RPN网络的有效性,如下表Table1。网络这些结果都是基于ResNet-50。评价标准采用AR,AR表示Average Recall,AR右上角的100表示每张图像有100个anchor,AR的右下角s,m,l表示COCO数据集中object的大小分别是小,中,大。feature列的大括号{}表示每层独立预测。 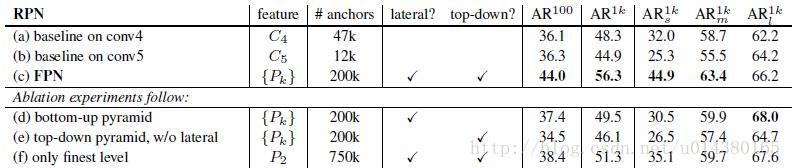
从(a)(b)(c)的对比可以看出FRN的作用确实很明显。另外(a)和(b)的对比可以看出高层特征并非比低一层的特征有效。
(d)表示只有横向连接,而没有自顶向下的过程,也就是仅仅对自底向上(bottom-up)的每一层结果做一个11的横向连接和33的卷积得到最终的结果,有点像Fig1的(b)。从feature列可以看出预测还是分层独立的。作者推测(d)的结果并不好的原因在于在自底向上的不同层之间的semantic gaps比较大。
(e)表示有自顶向下的过程,但是没有横向连接,即向下过程没有融合原来的特征。这样效果也不好的原因在于目标的location特征在经过多次降采样和上采样过程后变得更加不准确。
(f)采用finest level层做预测(参考Fig2的上面那个结构),即经过多次特征上采样和融合到最后一步生成的特征用于预测,主要是证明金字塔分层独立预测的表达能力。显然finest level的效果不如FPN好,原因在于PRN网络是一个窗口大小固定的滑动窗口检测器,因此在金字塔的不同层滑动可以增加其对尺度变化的鲁棒性。另外(f)有更多的anchor,说明增加anchor的数量并不能有效提高准确率。
作者提出的FPN(Feature Pyramid Network)算法同时利用低层特征高分辨率和高层特征的高语义信息,通过融合这些不同层的特征达到预测的效果。并且预测是在每个融合后的特征层上单独进行的,这和常规的特征融合方式不同。
目标检测两阶段和一阶段的核心区别
目标检测技术从阶段上分为两种,一阶段和二阶段。二阶段的核心思想是首先提出proposal框,通过第一阶段的网络回归出目标框的大概位置、大小及是前景的概率,第二阶段是通过另一个网络回归出目标框的位置、大小及类别;而一阶段网络的核心是,对于输入图像,通过网络直接回归出目标大小、位置和类别。
目标检测两阶段比一阶段的算法精度高的原因
1.正负样本的不均衡性
当某一类别的样本数特别多的时候,训练出来的网络对该类的检测精度往往会比较高。而当某一类的训练样本数较少的时候,模型对该类目标的检测精度就会有所下降,这就是所谓样本的不均衡性导致的检测精度的差异。
对于一阶段的目标检测来说,它既要做定位又要做分类,最后几层中1×1的卷积层的loss都混合在一起,没有明确的分工哪部分专门做分类,哪部分专门做预测框的回归,这样的话对于每个参数来说,学习的难度就增加了。
对于二阶段的目标检测来说(Faster RCNN),在RPN网络结构中进行了前景和背景的分类和检测,这个过程与一阶段的目标检测直接一上来就进行分类和检测要简单的很多,有了前景和背景的区分,就可以选择性的挑选样本,是的正负样本变得更加的均衡,然后重点对一些参数进行分类训练。训练的分类难度会比一阶段目标检测直接做混合分类和预测框回归要来的简单很多。

















 19万+
19万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









