







 本文详细介绍了在Zephyr中通过HAL库调用I2C硬件驱动的方法,涉及I2C启动流程,以及关键API如i2c_configure、i2c_transfer等的使用、配置和功能。重点讲解了在调试官方demo时的工程配置和如何处理I2C通信中的问题。
本文详细介绍了在Zephyr中通过HAL库调用I2C硬件驱动的方法,涉及I2C启动流程,以及关键API如i2c_configure、i2c_transfer等的使用、配置和功能。重点讲解了在调试官方demo时的工程配置和如何处理I2C通信中的问题。
一、前言
zephyr调用硬件的i2c驱动是通过调用HAL库形式,硬件参数设置更多的是在工程的配置文件中设置,比如dts、.conf、.overlay文件,这里主要是介绍下调试官方demo过程中涉及到的一些工程配置和关键api介绍。
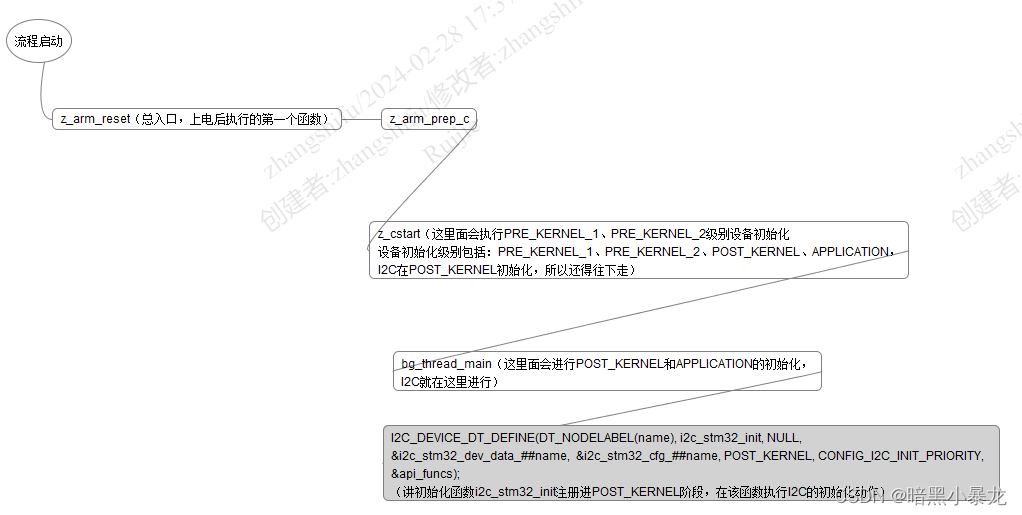
二、I2C启动流程
简单梳理下I2C驱动在zephyr的初始化,关键函数会在流程中列出。
三、关键API
static const struct i2c_driver_api api_funcs = {
.configure = i2c_stm32_runtime_configure,
.transfer = i2c_stm32_transfer,
#if defined(CONFIG_I2C_SLAVE)
.slave_register = i2c_stm32_slave_register,
.slave_unregister = i2c_stm32_slave_unregister,
#endif
};
I2C操作的api都会注册进i2c_driver_api 结构体,下面具体讲讲每个函数。
i2c_configure
函数原型
int i2c_configure(const struct device *dev, uint32_t dev_config) 配置主机的i2c控制器 0成功,非0失败
参数介绍
dev const struct d
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 300
300

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









