







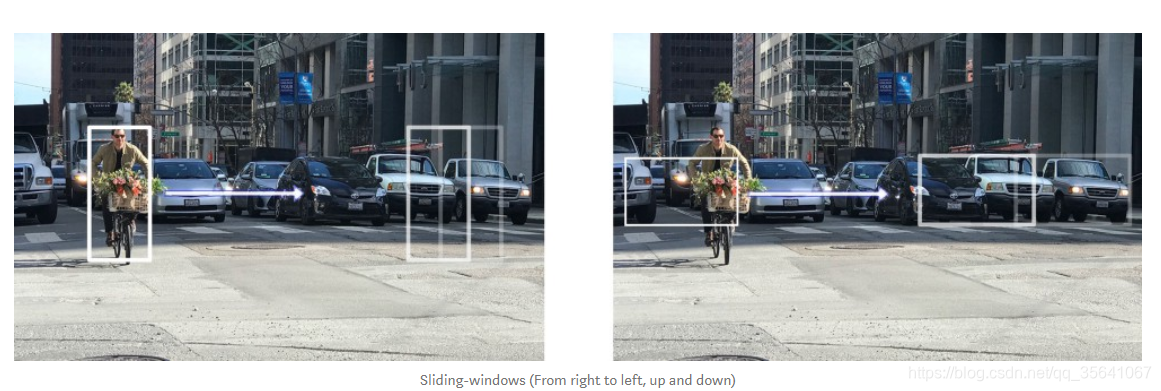
基于滑窗的CNN网络目标检测
RCNN
因为基于滑动窗口的检测产生的窗口很多都是无用的窗口(不包含物体或者没有完整包含物体),所以RCNN在此基础改进窗口的获取方式,(使用selective_search产生窗口)
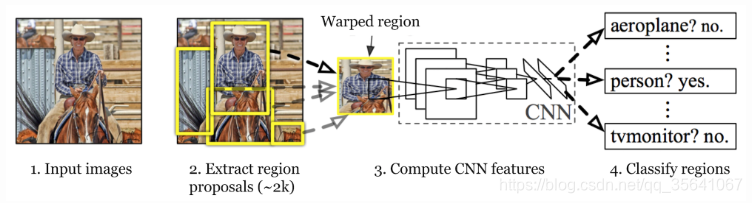
RCNN的四个步骤
1.输入图像
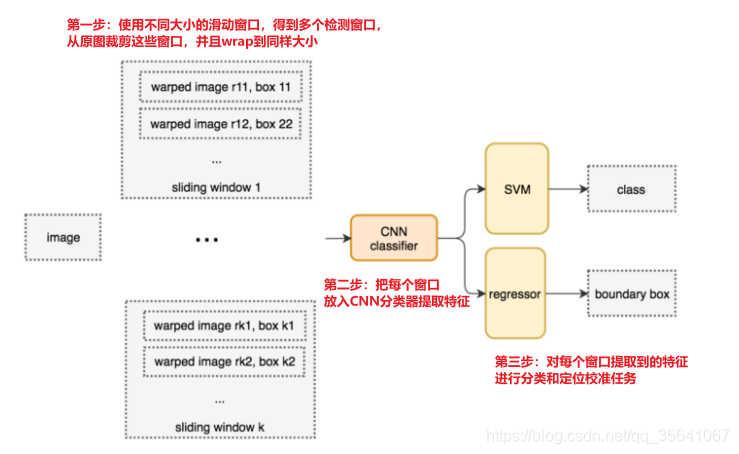
2.使用selective_search提取一系列的检测窗口,并从原图裁剪之后warp到固定大小记作warped region(大约2k个)
3.每个wraped region都会放入CNN分类器提取特征
4.提取到的特征连接SVM和坐标回归器进行分类与检测
selective search
方法: 初始一张图像被划分为很多初始小区域,之后使用贪心算法不断合并两个相邻的区域,不断合并直到整张图像的每个区域合并完成。
合并原则: S ( a , b ) = S t e x t u r e ( a , b ) + S s i z e ( a , b ) S(a,b) = S_{texture}(a,b)+S_{size}(a,b) S(a,b)=S
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 326
326











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









