







stm32使用TB6600驱动器控制42BYGH型步进电机
stm32使用TB6600驱动器控制42BYGH型步进电机
文章目录
前言
例如:随着人工智能的不断发展,机器学习这门技术也越来越重要,很多人都开启了学习机器学习,本文就介绍了机器学习的基础内容。
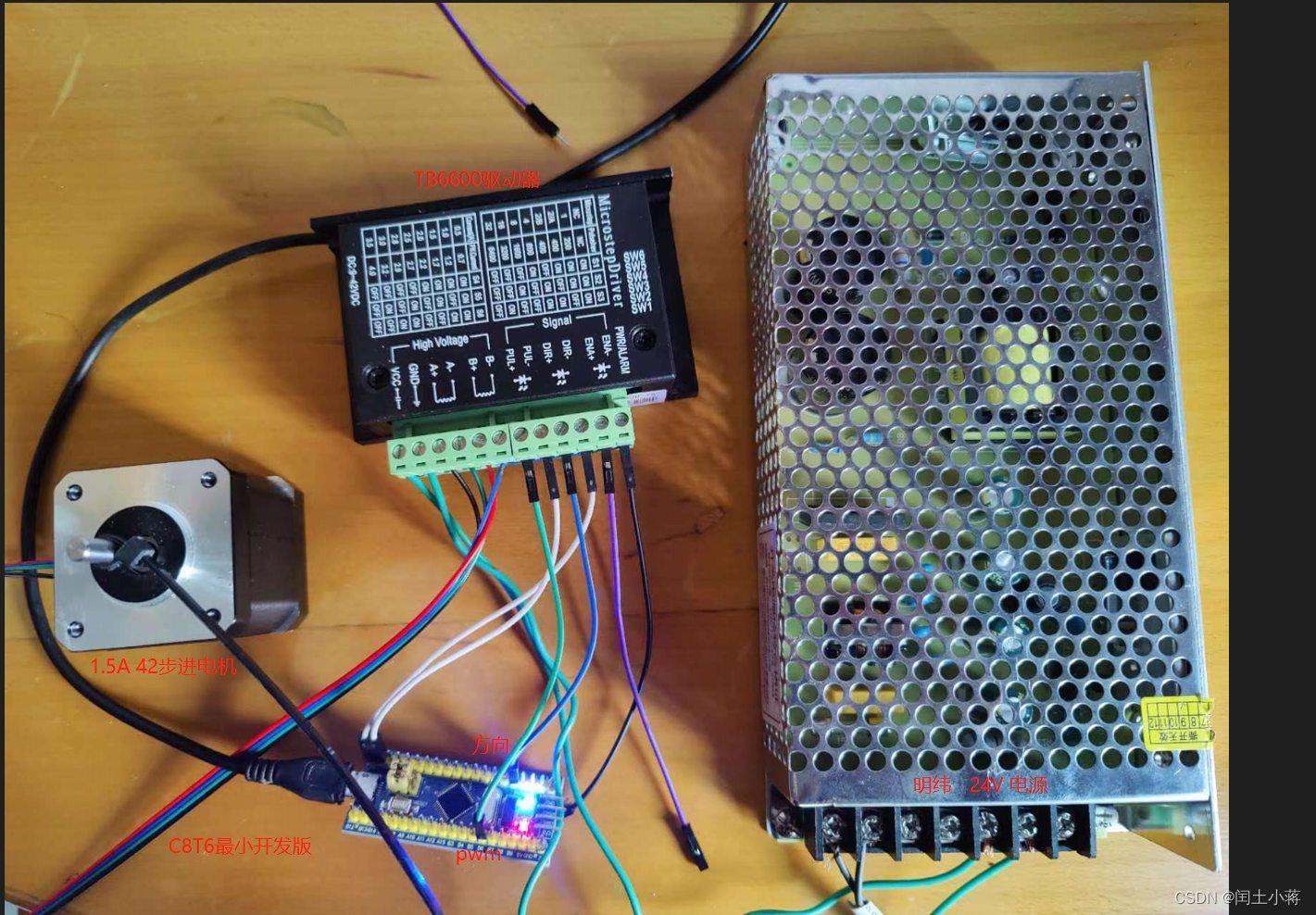
一、使用的设备说明介绍

24V开关电源
24V电源就是通过电路控制开关进行高速的导通于截至,将直流电转化为高频率的交流电提供给变压器进行变压从而产生所需要的一组或多组24V电压

接线注意事项,一般使用直接接线火线和零线,电源不分正负极,
输出电源和输入别搞反了,搞反了就冒烟了,容易到沫子
电压微调旋钮一般不建议使用。
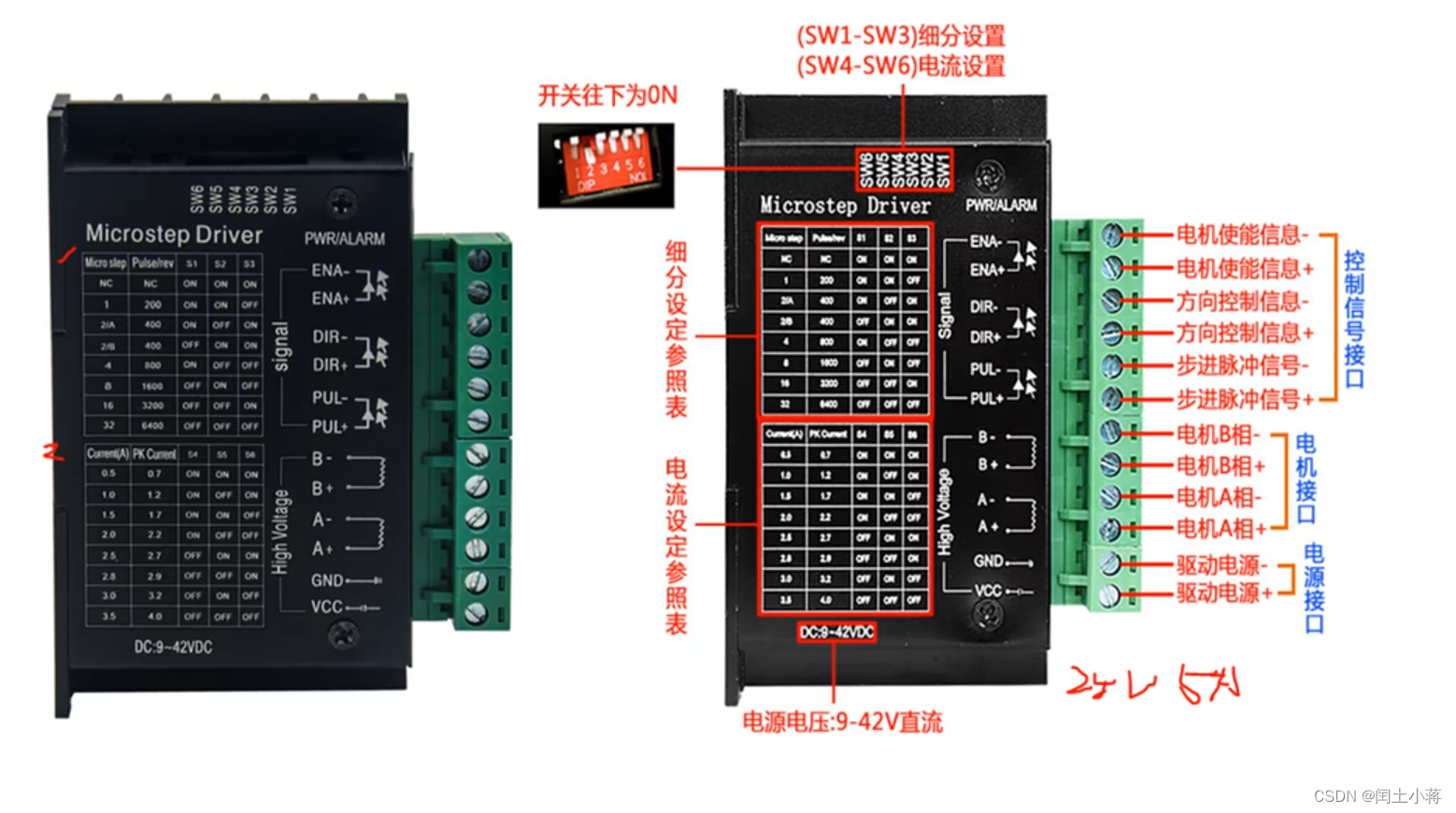
TB6600驱动器
产品特点
原装全新步进电机驱动芯片— 芯片:TB67S109AFTG
8档电流控制
7种细分可调
接口采用高速光耦隔离
自动半流减少发热量
大面积散热片不惧高温环境使用
抗高频干扰能力强
输入电压防反接保护
过热,过流短路保护
技术规格
输入电压:DC9-42V
控制信号:3.3-24V通用(无需串电阻)
输入电流:推荐使用开关电源功率5A
输出电流:0.5-4.0A
最大功耗:160W
细 分:1,2/A,2/B,4,8,16,32
温 度:工作温度-10~45℃;存放温度-40℃~70℃
湿 度:不能结露,不能有水珠
气 体:禁止有可燃气体和导电灰尘
体 积:96 * 71 * 37 mm
重 量:0.2 kg
拨码开关设定
6路拨码开关
S1~S3 细分脉冲
S4~S6 电流设置

42BYGH 步进电机
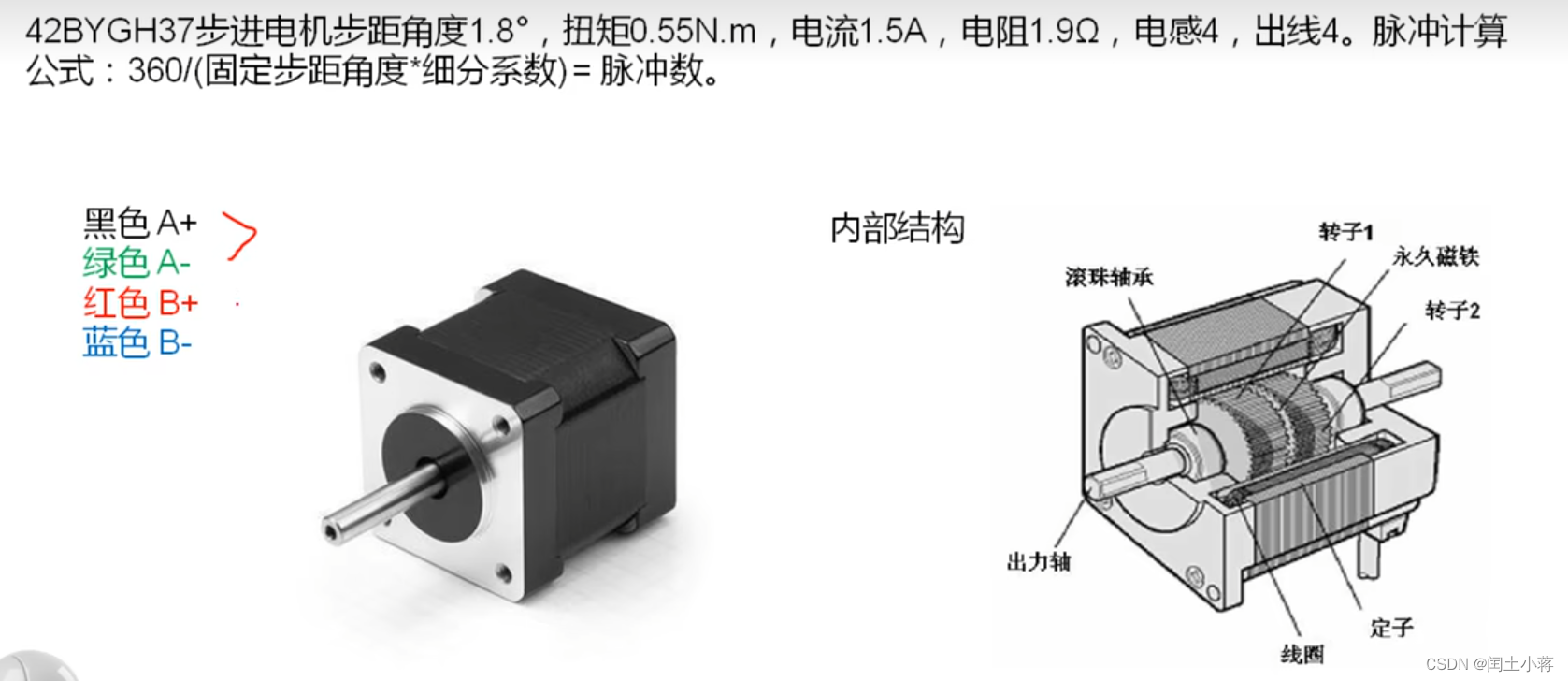
接线方法
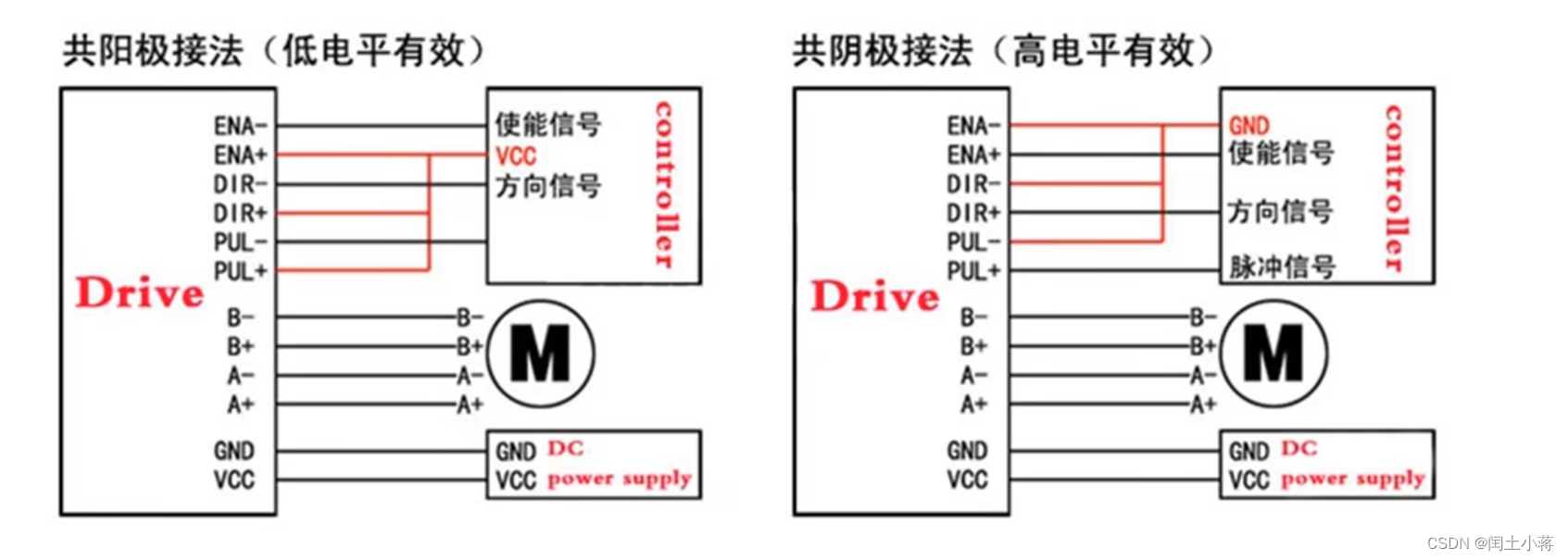
控制步进电机的正反转
TB6600驱动器上面有方向控制使能如下图

通过高低电平的使能方向来控制电机的正方转。
DIR+ 高电平 正转
DIR+ 低电平 反转
DIR- 低电平 正转
DIR- 高电平 反转
具体的转向根据实际电机的情况
控制步进电机的调速
通过使用驱动器来调速,开关拨码S1~S3 来设置不同的细分设置,
例如: 200,400,,,,3200,6400。
我们通过设置的pwm 的输入频段来确定每秒的输出,来确定所转化的步数,来确定转动一圈所需要的时间,或者转动的角度来确定的时间,TIM4_PWM_Init(100,500);通过数值算出一秒1440次,电机大约4.44秒转一圈 ,72000000/100/500= 14,40步/s ,设置6400 步为一周,则需要4.44s
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1349
1349

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











