







ROS知识2:ROS2运行小海龟程序例程
本文目的
安装好ROS2之后,运行小海龟程序测试程序
前置知识点
运行环境
远程Linux服务器ubuntu18.04,ROS2版本为Eloquent (Ubuntu Bionic)
运行步骤
安装小海龟代码
sudo apt update
sudo apt install ros-eloquent-turtlesim
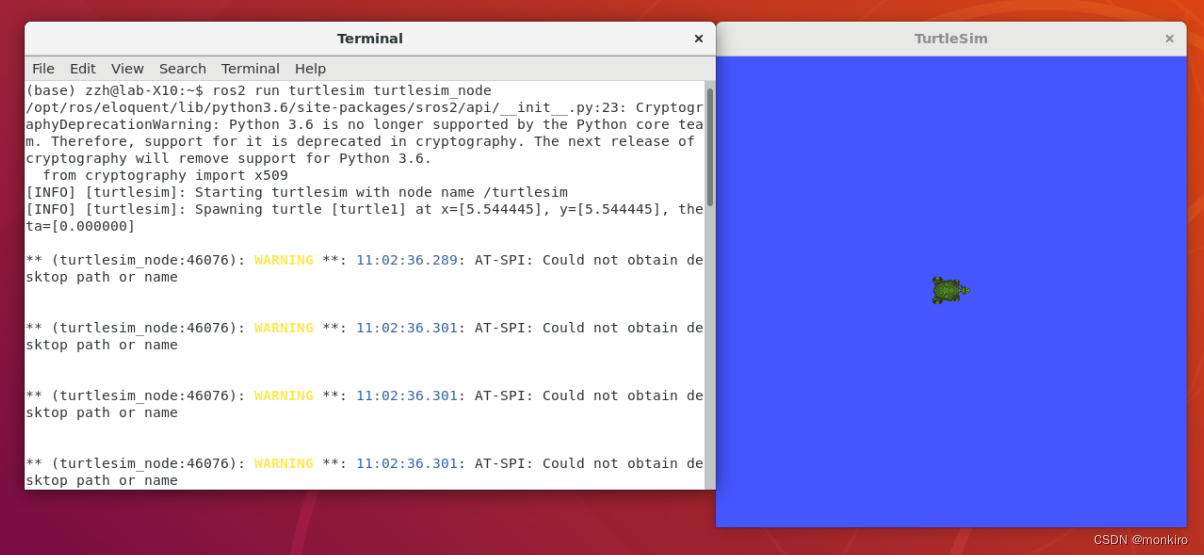
运行turtlesim_node
会出现如下的界面是一只小海龟
ros2 run turtlesim turtlesim_node
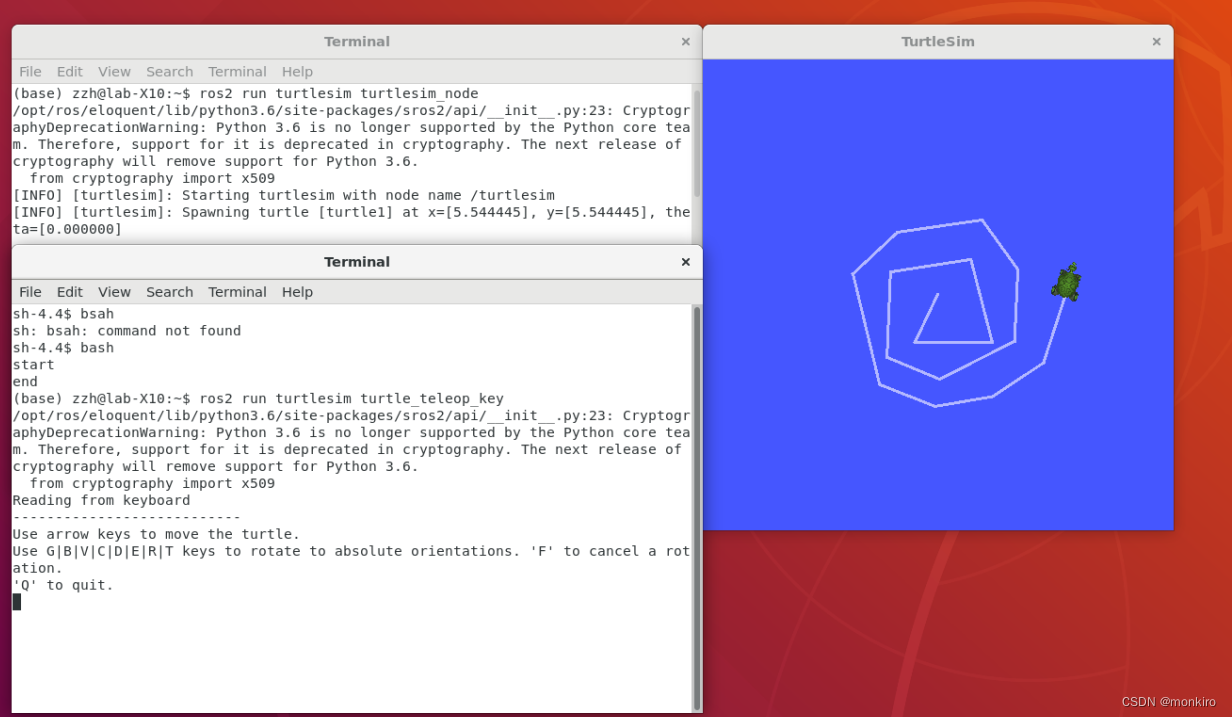
运行turtle_teleop_key
是一个用键盘控制小海龟的程序,会和前面的turtlesim_node节点建立通信连接,可以使用键盘对小海龟进行操作移动了。

















 4083
4083

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









