






本文将围绕着本人在接触rl后的各种问题,简单解答,顺便介绍各种算法。主要是给自己用做笔记,所以写得比较乱。
0、 可以参考的资料
openai的教程 这个讲得很棒,最好可以按照顺序读一遍
1、off policy / on policy?
off policy :采样策略和目标策略不一样,如Q learning(value based)用Q*在evaluate epsilon-greedy Q
on policy:采样策略和目标策略一样 如ppo(policy gradient) sarsa(value based)
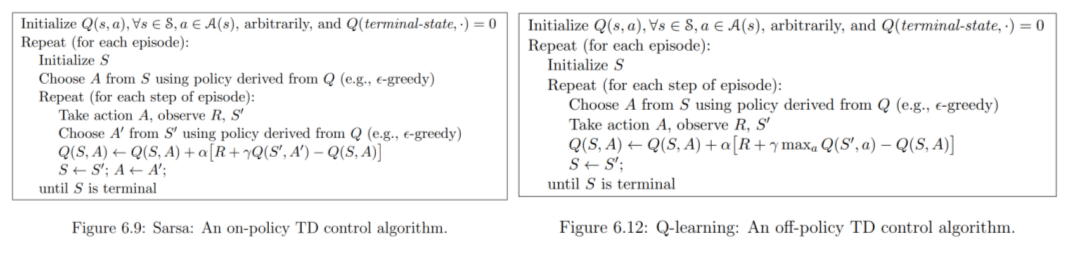
图中可以看到Q-Learning 因为采用了opitmal 的 action-value function ,所以成为了off-policy,而一般on-policy如果用value function 或者 action-value function,不会用带星号(或者说optimal的)。
2、Q-Learning外其他算法如何得到策略网络?
最早,让强化学习在近几年火起来的便是DQN。都知道Q-Learning 只能用在离散动作,因为没有策略网络。
然而,不同于Q-Learning这一套boostrap的方法,Actor-Critic体系的方法如PPO、A2C、A3C根据策略梯度,自然而然学到了策略网络。其中A2C、A3C是直接的策略梯度,样本效率比较低,PPO算是在此基础上的利用重要性采样、梯度裁剪提高样本利用率。不用boostrap,就不会overestimate,导致有偏的估计,效果理论上更好。
策略梯度
不同于一个最常见的策略梯度更新公式如下:
θ
k
+
1
=
θ
k
+
α
∇
θ
J
(
π
θ
)
∣
θ
k
\theta_{k+1}=\theta_k + \alpha\nabla_\theta J(\pi_\theta)|_{\theta_k}
θk+1=θk+α∇θJ(πθ)∣θk,其中
∇
θ
J
(
π
θ
)
\nabla_\theta J(\pi_\theta)
∇θJ(πθ)就是策略梯度。
为了让这一梯度可以被计算,需要转化为期望的形式,并且采样去估计这个期望,下面是进一步的推导:
∇
θ
J
(
π
θ
)
=
E
τ
∼
π
θ
[
R
(
τ
)
]
=
∇
θ
∫
τ
P
(
τ
∣
θ
)
R
(
τ
)
=
∫
τ
∇
θ
P
(
τ
∣
θ
)
R
(
τ
)
=
∫
τ
P
(
τ
∣
θ
)
∇
θ
log
P
(
τ
∣
θ
)
R
(
τ
)
=
∫
τ
P
(
τ
∣
θ
)
∇
θ
log
(
ρ
0
(
s
0
)
∏
t
=
0
T
P
(
s
t
+
1
∣
s
t
,
a
t
)
π
θ
(
a
t
∣
s
t
)
)
R
(
τ
)
=
∫
τ
P
(
τ
∣
θ
)
∇
θ
log
(
∏
t
=
0
T
π
θ
(
a
t
∣
s
t
)
)
R
(
τ
)
=
E
τ
∼
π
θ
[
∑
t
=
0
T
∇
θ
log
π
θ
(
a
t
∣
s
t
)
R
(
τ
)
]
\nabla_\theta J(\pi_\theta) = \mathop{E} \limits_{\tau\sim\ \pi_{\theta}}\left[ R(\tau)\right ]\\ = \nabla_\theta \int_{\tau}P(\tau|\theta)R(\tau)\\ =\int_{\tau}\nabla_\theta P(\tau|\theta)R(\tau)\\ =\int_{\tau}P(\tau|\theta)\nabla_\theta \log P(\tau|\theta) R(\tau)\\ =\int_{\tau}P(\tau|\theta)\nabla_\theta \log \left(\rho_0(s_0) \prod_{t=0}^{T} P(s_{t+1}|s_t,a_t)\pi_\theta(a_t|s_t) \right)R(\tau)\\ =\int_{\tau}P(\tau|\theta)\nabla_\theta \log \left(\prod_{t=0}^{T} \pi_\theta(a_t|s_t) \right)R(\tau)\\ =\mathop{E} \limits_{\tau\sim\ \pi_{\theta}}\left[\sum_{t=0}^{T}\nabla_\theta \log \pi_\theta(a_t|s_t) R(\tau)\right]\\
∇θJ(πθ)=τ∼ πθE[R(τ)]=∇θ∫τP(τ∣θ)R(τ)=∫τ∇θP(τ∣θ)R(τ)=∫τP(τ∣θ)∇θlogP(τ∣θ)R(τ)=∫τP(τ∣θ)∇θlog(ρ0(s0)t=0∏TP(st+1∣st,at)πθ(at∣st))R(τ)=∫τP(τ∣θ)∇θlog(t=0∏Tπθ(at∣st))R(τ)=τ∼ πθE[t=0∑T∇θlogπθ(at∣st)R(τ)]
上面是最基础的策略梯度计算公式,围绕着
R
(
τ
)
R(\tau)
R(τ)这项有各种变体,常见的是去计算优势
∇
θ
J
(
π
θ
)
=
E
τ
∼
π
θ
[
∑
t
=
0
T
∇
θ
log
π
θ
(
a
t
∣
s
t
)
A
π
θ
(
s
t
,
a
t
)
]
\nabla_\theta J(\pi_\theta) =\mathop{E} \limits_{\tau\sim\ \pi_{\theta}}\left[\sum_{t=0}^{T}\nabla_\theta \log \pi_\theta(a_t|s_t) A^{\pi_\theta}(s_t,a_t)\right]
∇θJ(πθ)=τ∼ πθE[t=0∑T∇θlogπθ(at∣st)Aπθ(st,at)]
比如添加了baseline计算优势,并且不考虑过去的reward
∇ θ J ( π θ ) = E τ ∼ π θ [ ∑ t = 0 T ∇ θ log π θ ( a t ∣ s t ) ( ∑ t ′ = t T R ( s t ′ , a t ′ , s t ′ + 1 ) − b ( s t ) ) ] \nabla_\theta J(\pi_\theta) =\mathop{E} \limits_{\tau\sim\ \pi_{\theta}}\left[\sum_{t=0}^{T}\nabla_\theta \log \pi_\theta(a_t|s_t) \left( \sum_{t'=t}^{T}R(s_{t'},a_{t'},s_{t'+1}) - b(s_t) \right)\right] ∇θJ(πθ)=τ∼ πθE[t=0∑T∇θlogπθ(at∣st)(t′=t∑TR(st′,at′,st′+1)−b(st))]
也有用GAE估计优势的
TRPO (on-policy)
TRPO和下面的PPO都是试图多次利用已有的数据来更新策略,TRPO利用KL散度约束新老策略差异度:
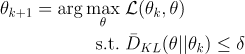
其中目标函数被称为代理优势函数


然后做泰勒展开近似(g就是代理又是函数)
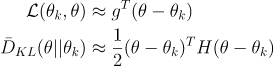
然后用拉格朗日对偶性求解,得到如下结果
由于有近似,所以更新的时候需要回溯搜索
此外,
H
−
1
H^{-1}
H−1在实际的计算中很难做到,用共轭梯度法求解

PPO(on-policy)
总的来说TRPO形式复杂,而PPO 用clip来约束差异,数学形式和计算更简洁,效果也很好。著名的OpenAI Five就是用的PPO

3、一些Q-Learning衍生出去的算法,如何“变”出一个策略网络呢?
那其他基于Q-Learning Booststrap体系的网络(off-policy的DDPG、offlineRL里的IQL、CQL)又该如何得到策略网络呢?下面简单介绍一下几种明显的DQN的衍生体。
DDPG(off-policy)
不同于最常见的随机策略的表达方式:
a
t
∼
π
(
⋅
∣
s
t
)
a_t \sim \pi(\cdot|s_t)
at∼π(⋅∣st)
DDPG采用确定策略梯度:
a
t
=
μ
(
s
t
)
a_t = \mu(s_t)
at=μ(st)
也就是说,当确定了最优动作价值函数
Q
∗
(
s
,
a
)
Q^*(s,a)
Q∗(s,a),动作也被确定:
a
∗
(
s
)
=
a
r
g
m
a
x
a
Q
∗
(
s
,
a
)
a^*(s)=arg\mathop{max}\limits_{a}Q^*(s,a)
a∗(s)=argamaxQ∗(s,a),从公式的形式来看,DDPG就是DQN在连续动作下的情况,DDPG也只能用在连续动作。
简单来说,DDPG就是把原来DQN的target,即
r
+
γ
m
a
x
a
′
Q
∗
(
s
′
,
a
′
)
r + \gamma \mathop{max}\limits_{a'}Q^*(s',a')
r+γa′maxQ∗(s′,a′),改为
r
+
γ
Q
∗
(
s
′
,
μ
(
s
′
)
)
r + \gamma Q^*(s',\mu(s'))
r+γQ∗(s′,μ(s′))
对于拥有target network来减少overestimate的DQN,更新的目标就是对于
ϕ
\phi
ϕ最小化以下目标:
L
(
ϕ
,
D
)
=
E
(
s
,
a
,
r
,
s
′
,
d
o
n
e
)
∼
D
[
(
Q
ϕ
(
s
,
a
)
−
(
r
+
γ
(
1
−
d
o
n
e
)
Q
ϕ
t
a
r
g
e
t
(
s
′
,
μ
θ
t
a
r
g
e
t
(
s
′
)
)
)
)
2
]
L(\phi,\mathcal{D})=\mathop{E}\limits_{(s,a,r,s',done)\sim\mathcal{D}}\left[\left( Q_\phi(s,a)-\left(r + \gamma(1-done)Q_{\phi _{target}}(s',\mu_{\theta_{target}}(s'))\right) \right)^2 \right]
L(ϕ,D)=(s,a,r,s′,done)∼DE[(Qϕ(s,a)−(r+γ(1−done)Qϕtarget(s′,μθtarget(s′))))2]
相应的对于策略的更新就是对于
θ
\theta
θ最大化以下目标:
E
s
∼
D
[
Q
ϕ
(
s
,
μ
θ
(
s
)
)
]
\mathop{E}\limits_{s\sim \mathcal{D}}[Q_\phi(s,\mu_\theta(s))]
s∼DE[Qϕ(s,μθ(s))]
其中target network按照如下更新:
ϕ
t
a
r
g
e
t
=
ρ
ϕ
t
a
r
g
e
t
+
(
1
−
ρ
)
ϕ
θ
t
a
r
g
e
t
=
ρ
θ
t
a
r
g
e
t
+
(
1
−
ρ
)
θ
\phi_{target} = \rho \phi_{target} + (1-\rho)\phi\\ \theta_{target} = \rho \theta_{target} + (1-\rho)\theta
ϕtarget=ρϕtarget+(1−ρ)ϕθtarget=ρθtarget+(1−ρ)θ
TD3(Twin Delayed DDPG)
准确来说就是在DDPG的基础上延时去更新target network,并使用clipped double-Q等trick ,就是加强版的DDPG,没有应用场景上的变化
CQL(offlineRL 和后文关系不大)
暂时不写
IQL(offlineRL 和后文关系不大)
暂时不写
4、为什么Q-Learning不用类似重要性采样的操作:
因为最优贝尔曼等式右侧期望只与状态转移分布有关,和策略无关,理论上各种策略都可以迭代到 Q ∗ Q^* Q∗
5、 同样是Actor-Critic体系的,都要用策略梯度,为什么比如SAC是off-policy,A2C/A3C/PPO是on-policy?
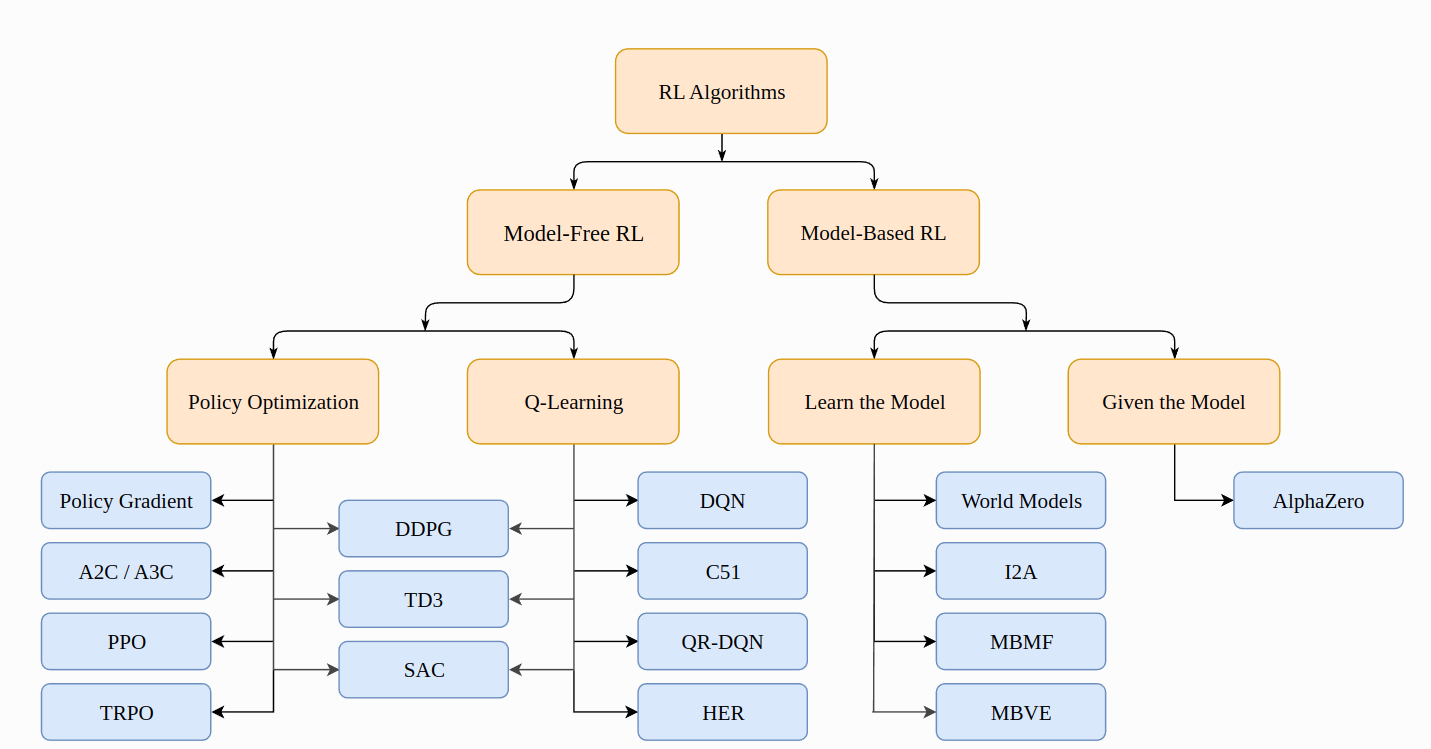
根据OpenAI里RL的教程,Model-Free RL可以根据学的内容大致分为 Policy Optimization(A2C/A3C/PPO :on-policy) 和 Q-Learning (DQN:off-policy),以及两者的融合(DDPG、SAC,两者均为off-policy)。
至于Actor-Critic 体系,从最早的含义而言,需要Critic价值迭代,Actor策略迭代,广义上而言,有策略网络和价值网络的都算,我认为SAC和DDPG一样都属于后者,因为他们的策略网络是通过最大化价值函数而来的。
SAC(off-policy)
SAC可以粗略看为加了熵的DDPG,它引入了最大熵学习的概念,也就是在各个reward上加上
α
H
(
π
(
⋅
∣
s
t
)
)
\alpha H(\pi(\cdot|s_t))
αH(π(⋅∣st)),其中
H
(
P
)
=
E
x
∼
P
[
−
log
P
(
x
)
]
H(P) = \mathop{E}\limits_{x\sim P}\left[-\log P(x) \right]
H(P)=x∼PE[−logP(x)]
也就是说:
Q
π
(
s
,
a
)
=
E
s
′
∼
P
,
a
′
∼
π
[
R
(
s
,
a
,
s
′
)
+
γ
(
Q
π
(
s
′
,
a
′
)
+
α
H
(
π
(
⋅
∣
s
′
)
)
)
]
=
E
s
′
∼
P
,
a
′
∼
π
[
R
(
s
,
a
,
s
′
)
+
γ
(
Q
π
(
s
′
,
a
′
)
−
α
log
(
π
(
a
′
∣
s
′
)
)
)
]
Q^\pi(s,a) = \mathop{E}\limits_{s'\sim P,a'\sim \pi}\left[R(s,a,s')+\gamma (Q^\pi(s',a')+\alpha H(\pi(\cdot|s')))\right] \\ = \mathop{E}\limits_{s'\sim P,a'\sim \pi}\left[R(s,a,s')+\gamma (Q^\pi(s',a')-\alpha \log(\pi(a'|s')))\right]
Qπ(s,a)=s′∼P,a′∼πE[R(s,a,s′)+γ(Qπ(s′,a′)+αH(π(⋅∣s′)))]=s′∼P,a′∼πE[R(s,a,s′)+γ(Qπ(s′,a′)−αlog(π(a′∣s′)))]
和TD3比较相似的是SAC也用了boostraping的Q函数更新方法,以及target Q-network、clipped double-Q等手段
不一样的地方是除了引入最大熵,SAC的策略不需要target policy,而且是随机策略
SAC的Q更新部分, s , a , r , s ′ s,a,r,s' s,a,r,s′来自replay buffer, a ′ a' a′来自最新策略的采样:
Q π ( s , a ) ≈ E s ′ ∼ P , a ′ ∼ π [ r + γ ( Q π ( s ′ , a ~ ′ ) − α log ( π ( a ~ ′ ∣ s ′ ) ) ) ] Q^\pi(s,a) \approx \mathop{E}\limits_{s'\sim P,a'\sim \pi}\left[r+\gamma (Q^\pi(s',\tilde{a}')-\alpha \log(\pi(\tilde{a}'|s')))\right] Qπ(s,a)≈s′∼P,a′∼πE[r+γ(Qπ(s′,a~′)−αlog(π(a~′∣s′)))]
因为动作不是来自buffer,不是来自其他策略,所以也就没有重要性采样的说法
对于策略的学习,最大化
V
π
(
s
)
=
E
a
∼
π
[
Q
π
(
s
,
a
)
−
α
log
π
(
a
∣
s
)
]
V^\pi(s)=\mathop{E}\limits_{a\sim\pi}[Q^\pi(s,a)-\alpha\log\pi(a|s)]
Vπ(s)=a∼πE[Qπ(s,a)−αlogπ(a∣s)]
借助重参数化手段
a ~ θ ( s , ξ ) = t a n h ( μ θ ( s ) + σ θ ( s ) ⊙ ξ ) , ξ ∼ N ( 0 , I ) \tilde{a}_\theta(s,\xi)=tanh(\mu_\theta(s)+\sigma_\theta(s)\odot \xi), \xi\sim \mathcal{N}(0,I) a~θ(s,ξ)=tanh(μθ(s)+σθ(s)⊙ξ),ξ∼N(0,I)
得到
E
a
∼
π
θ
[
Q
π
θ
(
s
,
a
)
−
α
log
π
θ
(
a
∣
s
)
]
=
E
ξ
∼
N
[
Q
π
θ
(
s
,
a
~
θ
(
s
,
ξ
)
)
−
α
log
π
θ
(
a
~
θ
(
s
,
ξ
)
∣
s
)
]
\mathop{E}\limits_{a\sim\pi_\theta}[Q^{\pi_\theta}(s,a)-\alpha\log\pi_\theta(a|s)] = \mathop{E}\limits_{\xi\sim\mathcal{N}}[Q^{\pi_\theta}(s,\tilde{a}_\theta(s,\xi))-\alpha\log\pi_\theta(\tilde{a}_\theta(s,\xi)|s)]
a∼πθE[Qπθ(s,a)−αlogπθ(a∣s)]=ξ∼NE[Qπθ(s,a~θ(s,ξ))−αlogπθ(a~θ(s,ξ)∣s)]
进一步的double-Q不再展开
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











